Moduł GPS MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
Moduł GPS MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEKSYS
Nie można załadować gotowości do odbioru
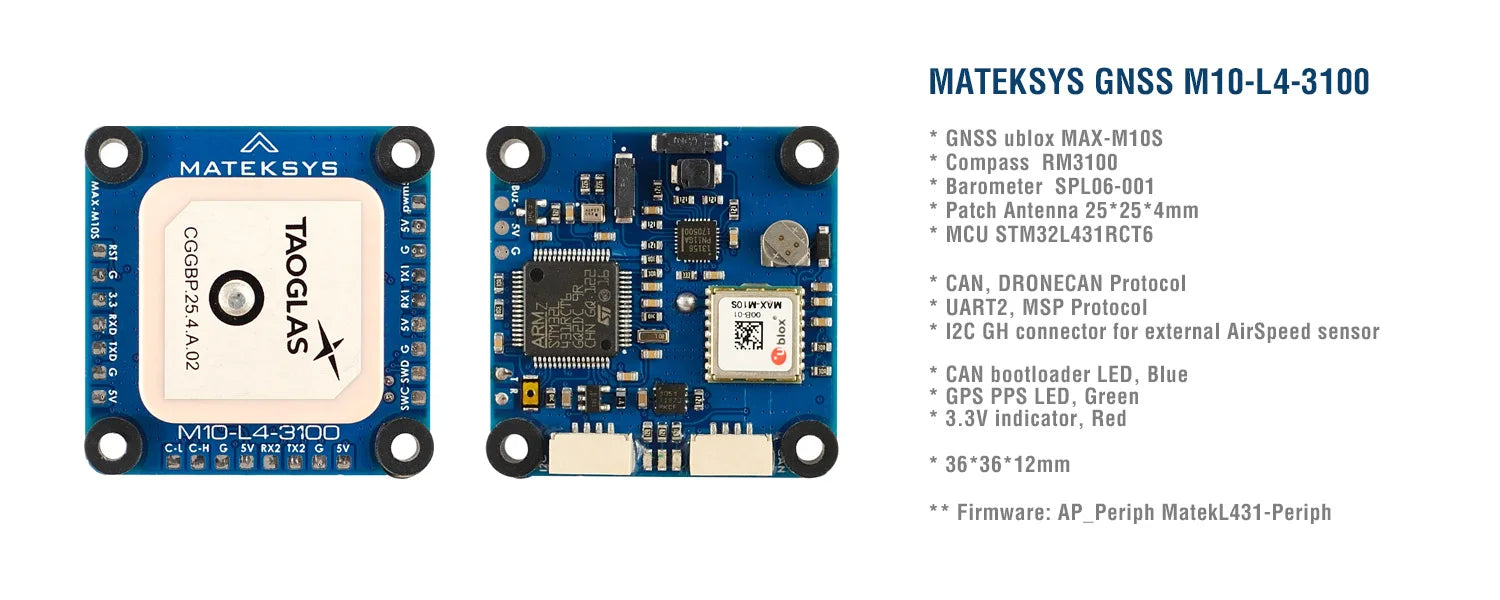
MATEK M10-L4-3100 — SPECYFIKACJE GNSS Mateksys AP_PERIPH
Zastosowanie: Pojazdy i zabawki zdalnie sterowane
Zalecany wiek: 12+lat,14+lat,6-12lat
Pochodzenie: Chiny kontynentalne
Materiał: Materiał kompozytowy
Nazwa marki: MATEKSYS
AP_PERIPH GNSS M10-L4-3100
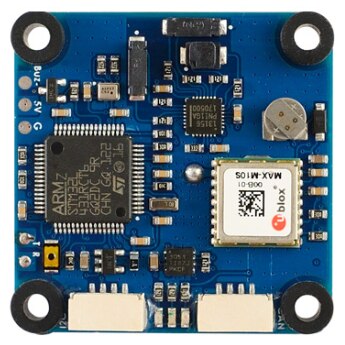
Węzeł AP_Periph L431 CAN, MAX-M10S, RM3100, SPL06-001, protokół DroneCAN i UART_MSP
-
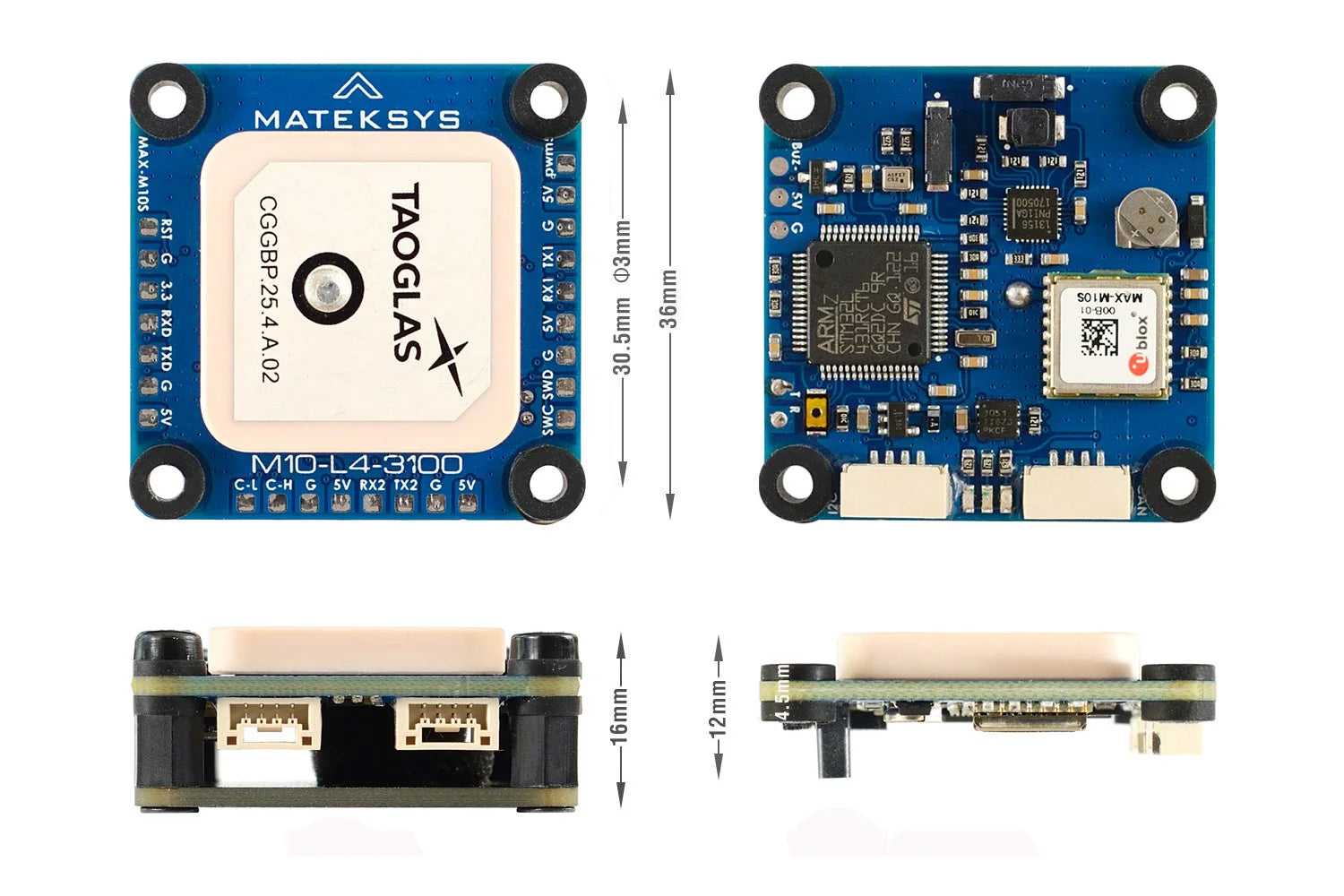
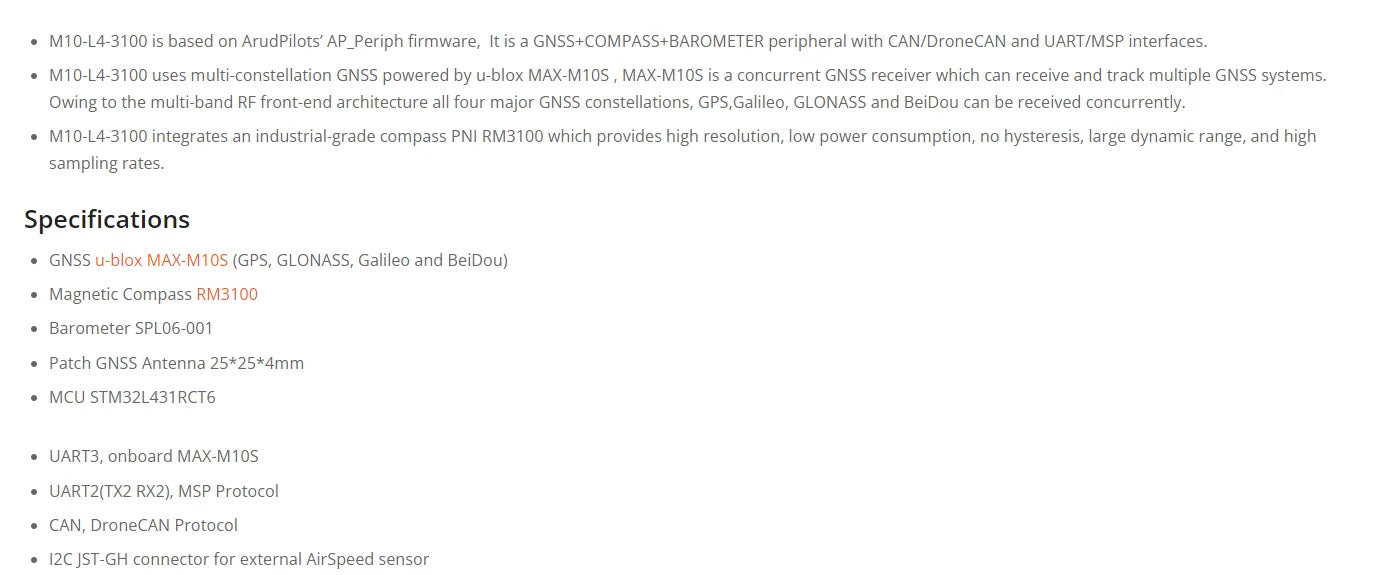
M10-L4-3100 jest oparty na oprogramowaniu sprzętowym AP_Periph firmy ArudPilots. Jest to urządzenie peryferyjne GNSS+COMPASS+BAROMETER z interfejsami CAN/DroneCAN i UART/MSP.
-
M10-L4-3100 wykorzystuje wielokonstelacyjny GNSS zasilany przez u-blox MAX-M10S. MAX-M10S to współbieżny odbiornik GNSS, który może odbierać i śledzić wiele systemów GNSS. Dzięki wielopasmowej architekturze front-end RF wszystkie cztery główne konstelacje GNSS, GPS, Galileo, GLONASS i BeiDou, mogą być odbierane jednocześnie.
-
M10-L4-3100 zawiera kompas klasy przemysłowej PNI RM3100, który zapewnia wysoką rozdzielczość, niskie zużycie energii, brak histerezy, duży zakres dynamiki i wysoką częstotliwość próbkowania.

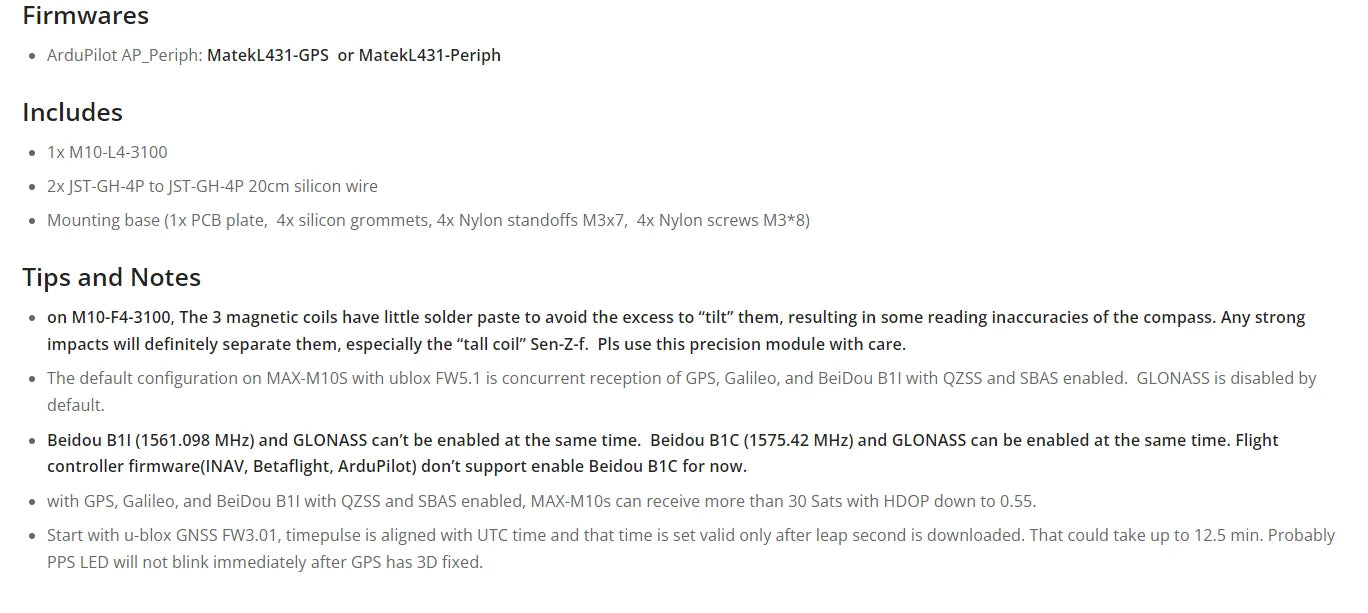
domyślna konfiguracja w systemie MAX-M1OS z ublox FWS . to równoczesny odbiór GPS, Galileo i BeiDou BI z włączoną funkcją QZSS i SBAS. GLONASS jest domyślnie wyłączony Beidou B1I (1575,42 MHz) i nie można go jednocześnie włączyć.
Połączenie CAN (protokół UAVCAN)
-
M10-L4-3100 5 V — FC 4,5 V ~ 5.3V
-
M10-L4-3100 CAN-H — FC CAN High
-
M10-L4-3100 CAN-L — FC CAN Low
-
M10-L4-3100 G — FC G/GND
Parametry FC UAVCAN (ArduPilot)
-
CAN_D1_PROTOCOL -> 1
-
CAN_P1_DRIVER -> 1
-
TYP_GPS -> 9 (DroneCAN)
-
COMPASS_TYPEMASK -> 0 (upewnij się, że DroneCAN jest niezaznaczony)
———————————————————————––
Jeśli podłączysz czujnik prędkości I2C do portu I2C M10-L4-3100
-
ARSPD_TYPE -> 8 (UAVCAN)
-
ARSPD_USE -> 1
Musisz także ustawić parametry węzła CAN dla czujnika prędkości podłączonego do portu I2C M10-L4-3100
Planowanie misji > Konfiguracja wstępna > Sprzęt opcjonalny > UAVCAN > Tryb SLCan CAN1 > Parametry
-
MS4525 ARSP_TYPE -> 1 (domyślnie w hwdef)
-
MS5525 ARSP_TYPE -> 3 obsługuje tylko MS5525 z adresem 0x77
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
Zapisz i uruchom ponownie
————————————————————————–
Jeśli podłączysz 2812LED DIN do podkładki PWM5
-
NTF_LED_TYPES -> (upewnij się, że DroneCAN jest zaznaczony)
Tryb SLCan CAN1 > Parametry
-
FUNKCJA_WYJŚCIOWA 120
-
NTF_LED_TYPES 455
-
AP_Periph fw musi mieć wartość „MatekL431-Periph”, funkcja MSP jest wyłączona w „MatekL431-GPS”
Połączenie UART (protokół MSP)
-
M10-L4-3100 5 V — FC 4,0 V ~ 5,3 V
-
M10-L4-3100 TX2 — FC zapasowe UART_RX
-
M10-L4-3100 RX2 — FC zapasowe UART_TX (niekonieczne)
-
M10-L4-3100 G — FC G/GND
ArduPilot (od wersji 4.1.x) Parametry FC
-
Serialx_PROTOCOL = 32 (MSP), gdzie x to port SERIAL używany do połączenia z autopilotem.
-
Serialx_BAUD = 115 gdzie x to port SERIAL używany do połączenia z autopilotem.
-
TYP GPS = 19 (MSP)
-
BARO_PROBE_EXT = 4096 (MSP Baro)
-
BARO_PRIMARY = 1 (Jeśli chcesz używać baro MSP jako baro podstawowego, w przeciwnym razie pozostaw ustawienie domyślne)
-
COMPASS_TYPEMASK 0 (lub upewnij się, że bit MSP nie jest zaznaczony)
INAV (od wersji 2.6) Parametry FC
-
M10-L4-3100 jest kompatybilny z dowolnym kontrolerem lotu obsługiwanym przez INAV poprzez zapasowy UART.
-
W zakładce porty Włącz MSP na odpowiednim UART, do którego podłączony jest M10-L4-3100, NIE włączaj „GPS” na tym UART. wybierz Prędkość transmisji 115200.
-
funkcja GPS
-
ustaw gps_provider = MSP
-
ustaw mag_hardware = MSP
-
ustaw baro_hardware = MSP
-
ustaw wyrównanie_mag = CW90, jeśli kompas jest zamontowany płasko ze strzałką skierowaną do przodu, a strzałka kontrolera lotu również jest skierowana do przodu.
Related Collections