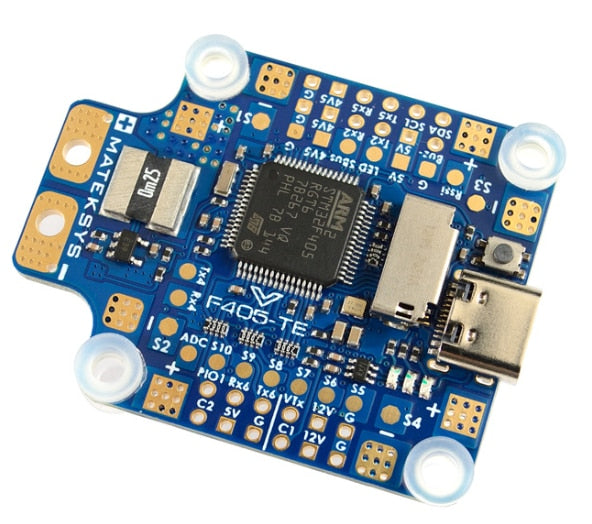
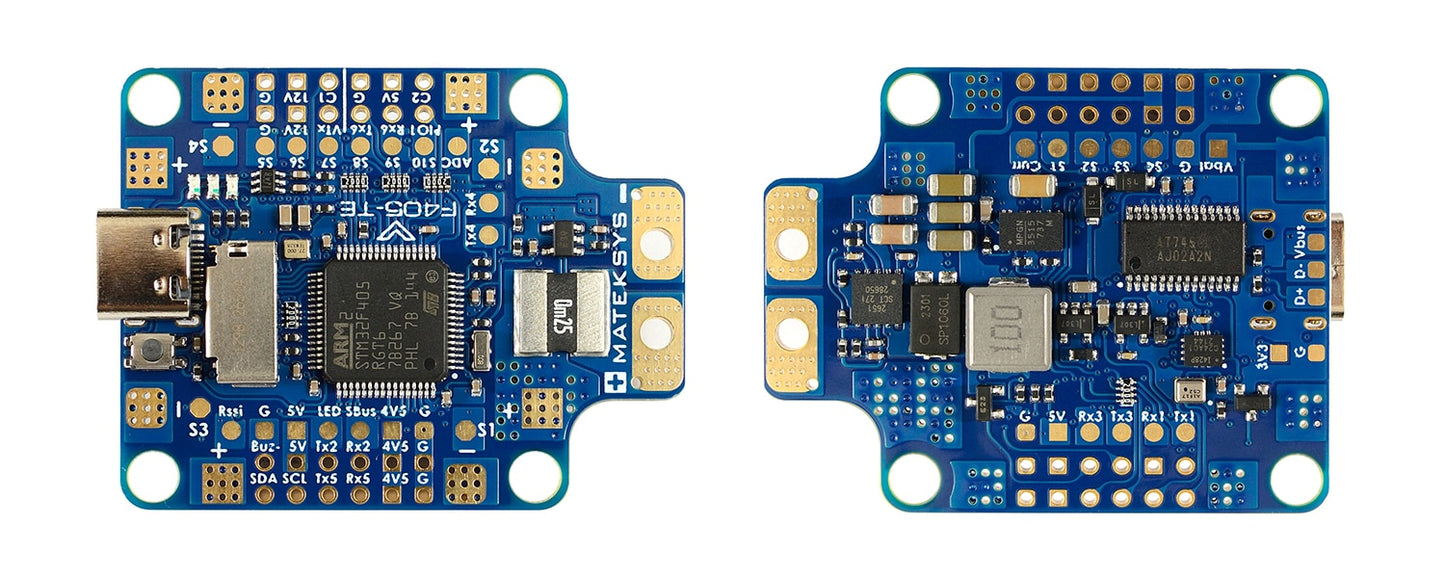
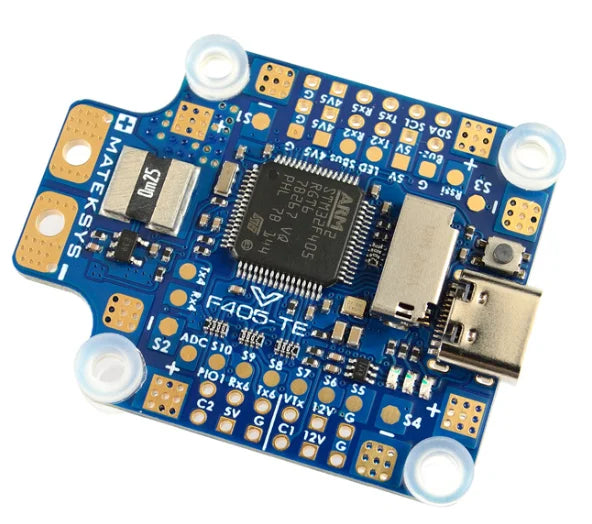
MATEK F405-TE - KONTROLER LOTU Mateksys
MATEK F405-TE - KONTROLER LOTU Mateksys
MATEKSYS
Nie można załadować gotowości do odbioru
MATEK F405-TE - SPECYFIKACJA KONTROLERA LOTU Mateksys
Zastosowanie: Pojazdy i zabawki zdalnie sterowane
Zalecany wiek: 12+lat,14+lat
Pochodzenie: Chiny kontynentalne
Materiał: Materiał kompozytowy
Nazwa marki: MATEKSYS
Specyfikacje
-
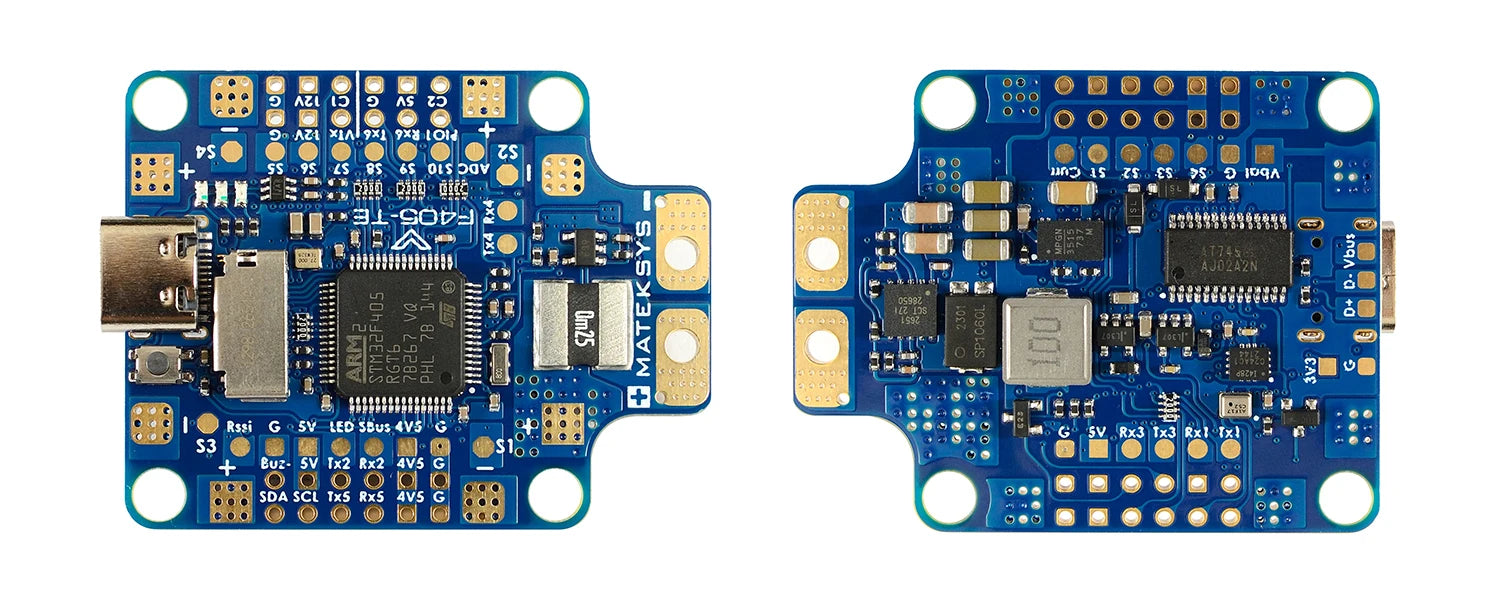
MCU: 168 MHz STM32F405RGT6
-
IMU: ICM42688-P (SPI)
-
Baro: SPL06-001 (I2C)
-
OSD: AT7456E (SPI)
-
Czarna skrzynka: gniazdo MicroSD (SPI)
-
6x UART, 1x opcja Softserial_Tx (INAV/BF)
-
11x wyjść PWM (8x Dshot kompatybilnych z BF/ArduPilot)
-
1x I2C
-
4x ADC (VBAT, prąd, RSSI, prędkość lotu)
-
1x zapasowy PINIO
-
4x indywidualne pola zasilania/sygnału ESC
-
1x grupa podkładek G/S1/S2/S3/S4 dla sygnału ESC 4w1/GND
-
Wbudowany falownik na UART2-RX dla wejścia SBUS
-
Przełączane wejście podwójnej kamery
Specyfikacje PDB
-
Wejście: 9~36V (3~8S LiPo)
-
PDB: 4x 35A (maks. 4x 50A)
-
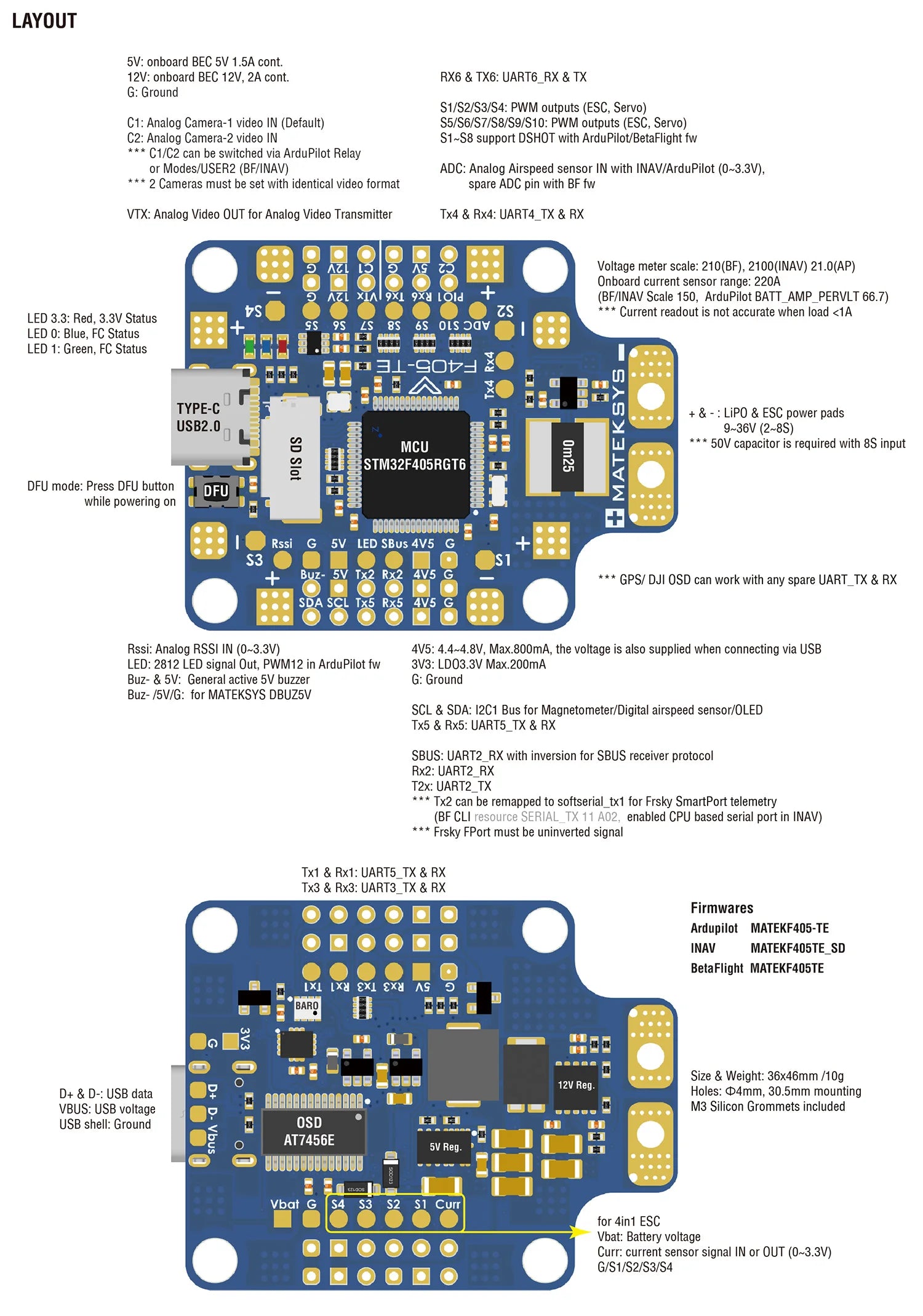
BEC: 5 V 1,5 A
-
BEC: 12V 2A
-
LDO 3,3 V: 200 mA
-
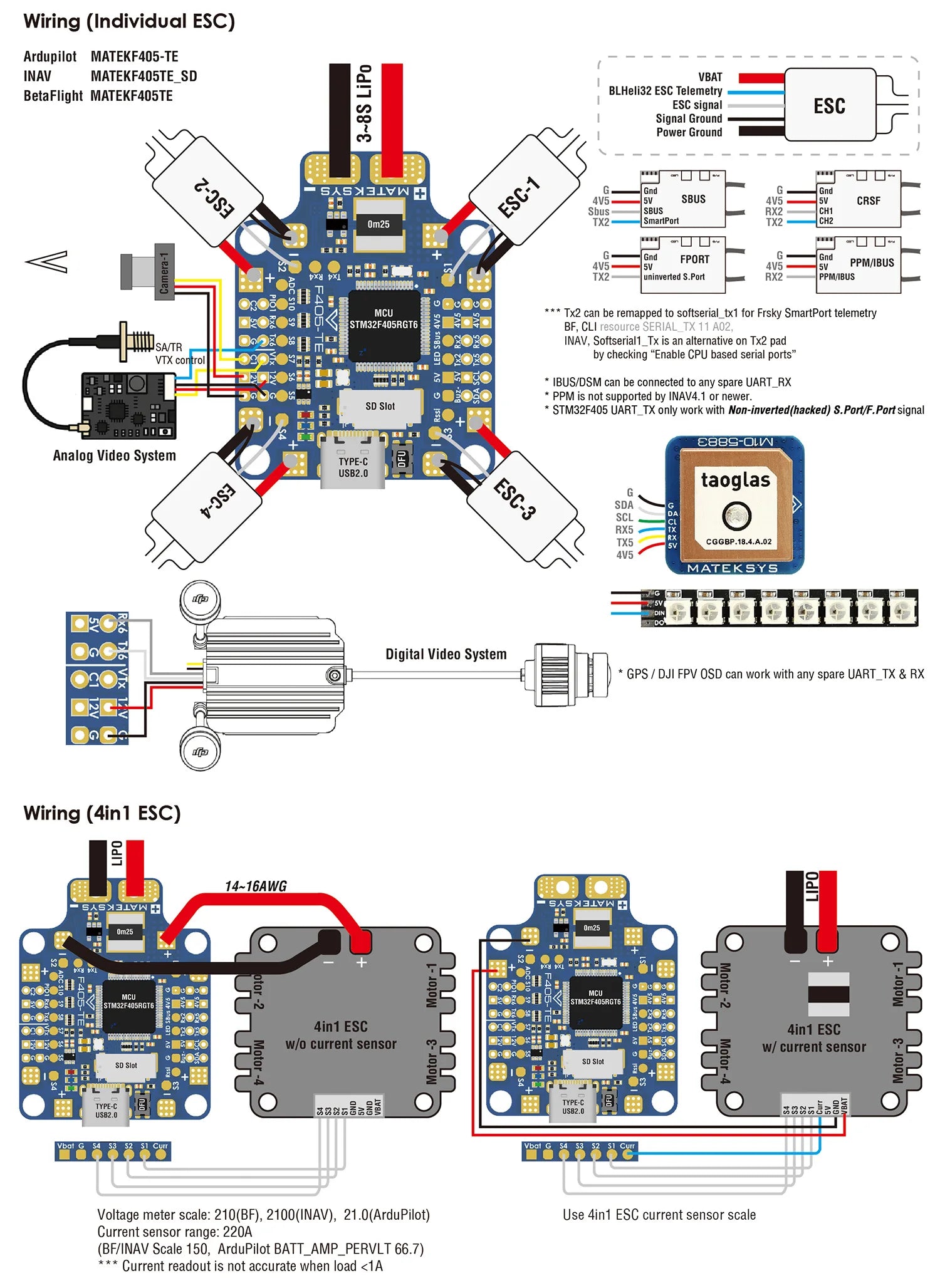
Prąd czujnika: 220 A, 3,3 V ADC (skala INAV/BF 150, ArduPilot 66,7 A/V)
-
Dzielnik napięcia akumulatora 1K:20K (skala INAV 2100, skala BF 210, ArduPilot BATT_VOLT_MULT 21.0)
Oprogramowanie sprzętowe
-
ArduPilot: MatekF405-TE
-
INAV: MATEKF405TE_SD
-
BetaFlight: MATEKF405TE
Fizyczne
-
Montaż: 30,5 x 30,5 mm, Φ4 mm z przelotkami Φ3 mm
-
Wymiary: 36 x 46 mm
-
Waga: 10g
W tym
-
1x F405-TE
-
6x przelotek silikonowych M4 do M3
-
1x Rubycon ZLH 35 V/470 uF (niski ESR)
WSKAZÓWKI
INAV, DSHOT nie może działać na S3, S5, S7 z powodu konfliktu DMA, użyj ONESHOT lub MULTISHOT i skalibruj zakres ESC PWM.
BetaFlight, ustaw dshot_bitbang = ON , gdy używasz X6 i X8 DSHOT.
ArduPilot, ustaw LOG_BACKEND_TYPE = 1 (plik) do rejestrowania karty SD
Related Collections