


Kontroler lotu MATEKSYS H7A3-SLIM - ICM42688P - 30x30
Kontroler lotu MATEKSYS H7A3-SLIM - ICM42688P - 30x30
MATEKSYS
Nie można załadować gotowości do odbioru
Kontroler lotu MATEKSYS H7A3-SLIM oferuje wysoką wydajność w kompaktowej konstrukcji 30x30mm. Posiada mikroprocesor STM32H7A3RIT6, procesor Cortex-M7 280MHz, 1.4MB RAM i 2MB Flash. Dzięki IMU ICM42688P, barometr SPL06-001, OSD AT7456E oraz 128MB Flash Blackbox, zapewnia precyzyjne dane i obszerną rejestrację. Kontroler zawiera 6 UARTów, 11 wyjść PWM, 1 I2C, 1 port CAN oraz 4 kanały ADC. Posiada również trzy diody LED statusowe, port USB typu C oraz przełączalne wyjście 9V. Z wzorem montażowym 30.5 x 30.5mm, otworami 4mm, uszczelkami 3mm i ważąc zaledwie 7g, jest idealny do wyścigów FPV i lotów freestyle. Dołączony jest plik 3D step do niestandardowej integracji.
Funkcje
- Wyświetlacz na ekranie
- Montaż 30x30
- Kompaktowy design
- Łączność
- Lekki
Specyfikacje
Specyfikacje
- MCU: STM32H7A3RIT6, 280MHz Cortex-M7, 1.4MB RAM, 2MB Flash
- IMU: ICM42688P
- Baro: SPL06-001
- OSD: AT7456E
- Blackbox: 128MB Flash (1G-bit NAND)
- 6x Uarts (1,2,3,4, 5, 6) z wbudowaną inwersją.
- 11x wyjścia PWM
- 1x I2C
- 1x CAN
- 4x ADC (VBAT, Prąd, VB2, Cur2)
- 3x diody LED dla STATUSU FC (Niebieska, Czerwona) i wskaźnik 3.3V (Czerwona)
- USB Typ-C (USB2.0)
- 8x wyjścia PWM na 2x złączu JST-SH1.0_8pin dla 2x 4in1 ESC
- 1x złącze JST-GH1.25_4pin (5V/CAN-H/CAN-L/G)
- Wyjście 9V z przełącznikiem ON/OFF
- Cyfrowe wideo OSD jest wspierane przez dowolny wolny UART
Zasilanie
- Wejście Vbat: 6~36V (2~8S LiPo)
- BEC: 5V 2A ciągłe (Max.3A)
- BEC: 9V 2A ciągłe (Max.3A)
- LDO 3.3V: Max.200mA
- Brak wbudowanego czujnika prądu
- Pad ADC VB2 wspiera Max. 69V (dzielnik napięcia: 1K:20K)
Oprogramowanie FC
- ArduPilot: MATEKH7A3 (4.6 lub nowsze)
- ArduPlane https://firmware.ardupilot.org/Plane/beta/MatekH7A3/
- ArduCopter &https://firmware.ardupilot.org/Copter/beta/MatekH7A3/
- Programowanie za pomocą STM32CubeProgrammer
Fizyczne
- Montaż: 30,5 x 30,5 mm, Φ4 mm z gumkami Φ3 mm
- Wymiary: 36 x 36 x 5 mm
- Waga: 7 g
- 3D krok H7A3-SLIM_step.zip
W tym
- 1x H7A3-SLIM
- 6x silikonowe gumki M4 do M3
- 2x JST-SH1.0_8pin kabel, 5cm, & złącza 8pin
- 1x kabel JST-GH-4P do JST-GH-4P dla portu CAN, 20cm
Szczegóły

Kontroler lotu MATEKSYS H7A3-SLIM wykorzystuje MCU STM32H7A3 z ICM42688P IMU oraz port USB-C w wzorze montażowym 30,5 mm.

Kontroler lotu MATEKSYS H7A3-SLIM wykorzystuje kompaktowy układ 30x30 z portem USB-C i wyraźnie oznaczonymi padami dla schludnego okablowania.

MATEKSYS H7A3-SLIM wykorzystuje podwójne złącza JST-SH 1.0 8-pin oraz port JST-GH 4-pin i USB Type-C dla schludnego okablowania i łatwego ustawienia.

MATEKSYS H7A3-SLIM wykorzystuje wyraźnie oznaczone pady lutownicze i porty dla połączeń wideo kamery/VTx, UART, CAN i zasilania.
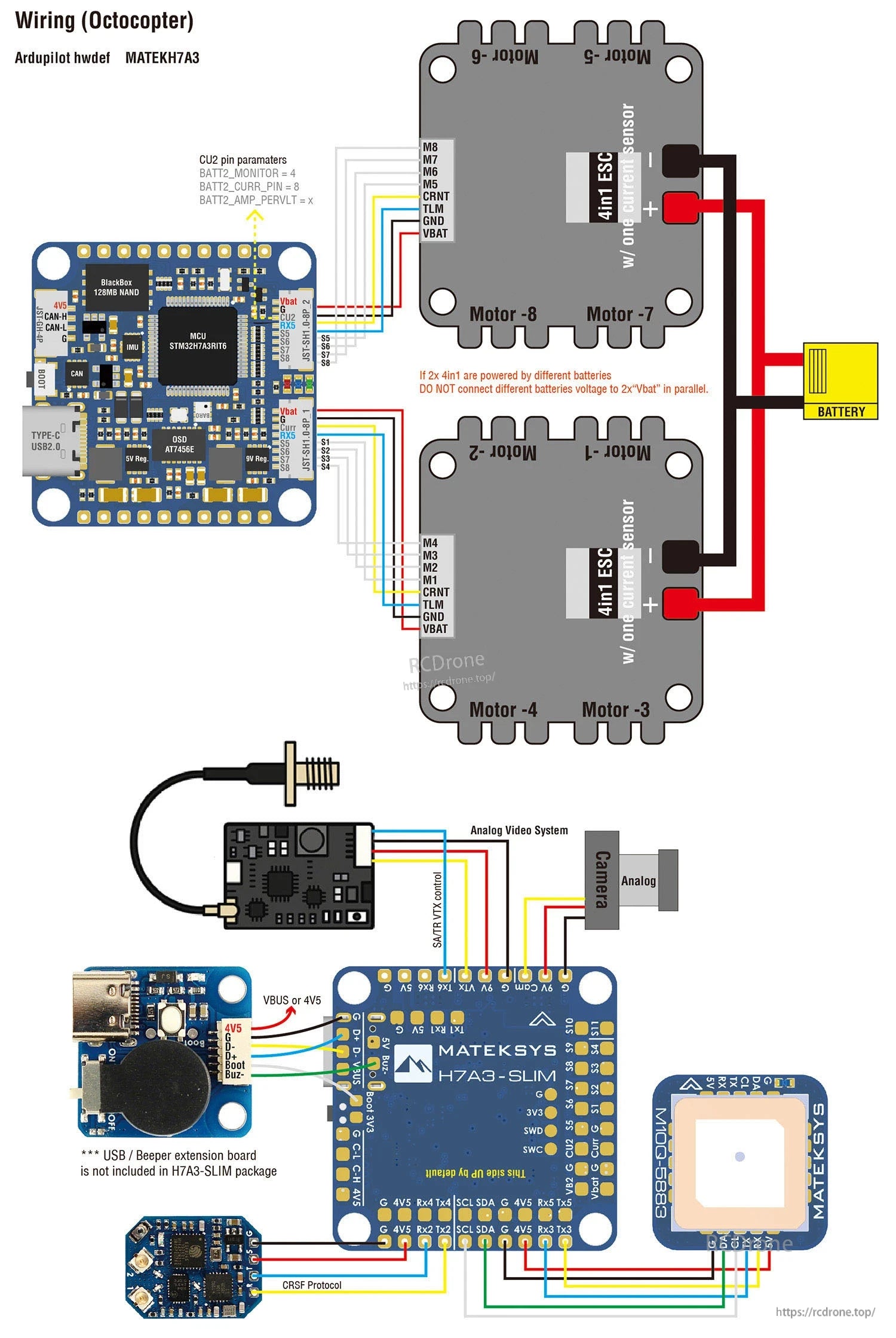
MATEKSYS H7A3-SLIM wykorzystuje wyraźnie oznaczone pady do podłączania podwójnych ESC 4-w-1, zasilania VBAT, GPS, odbiornika i komponentów wideo analogowego.

Mapowanie ArduPilot
| ArduPilot | ||||||
| PWM | S1 | PWM1 GPIO50 | Wejście/wyjście tolerujące 5 V | TIM1_CH2 | DMA/Bi-DShot | Grupa1 |
| S2 | PWM2 GPIO51 | Wejście/wyjście tolerujące 5 V | TIM1_CH3 | DMA/Bi-DShot | ||
| S3 | PWM3 GPIO52 | Wejście/wyjście tolerujące 5 V | TIM2_CH1 | DMA/Bi-DShot | Grupa2 | |
| S4 | PWM4 GPIO53 | Wejście/wyjście tolerujące 5 V | TIM2_CH2 | DMA/Bi-DShot | ||
| S5 | PWM5 GPIO54 | Wejście/wyjście tolerujące 5 V | TIM3_CH3 | DMA/Bi-DShot | Grupa3 | |
| S6 | PWM6 GPIO55 | I/O tolerujące 5 V | TIM3_CH4 | DMA/Bi-DShot | ||
| S7 | PWM7 GPIO56 | I/O tolerujące 5 V | TIM3_CH1 | DMA/Bi-DShot | ||
| S8 | PWM8 GPIO57 | I/O tolerujące 5 V | TIM3_CH2 | DMA/Bi-DShot | ||
| S9 | PWM9 GPIO58 | I/O tolerujące 5 V | TIM4_CH1 | DMA/DShot | Grupa4 | |
| S10 | PWM10 GPIO59 | I/O tolerujące 5 V | TIM4_CH2 | DMA/DShot | ||
| S11 | PWM11 GPIO60 | 5 V tolerancyjne I/O | TIM16_CH1 | DMA/DShot | Grupa5 | |
| PWM1~PWM11 są zdolne do Dshot i PWM.Jednak mieszanie Dshot i normalnej pracy PWM dla wyjść jest ograniczone do grup, tzn. włączenie Dshot dla wyjścia w grupie wymaga, aby WSZYSTKIE wyjścia w tej grupie były skonfigurowane i używane jako Dshot, a nie jako wyjścia PWM. Jeśli serwo i silnik są mieszane w tej samej grupie, upewnij się, że ta grupa działa z najniższą częstotliwością PWM zgodnie ze specyfikacją serwa. To znaczy. Jeśli serwo obsługuje maks. 50Hz, ESC musi działać na 50Hz w tej grupie. |
||||||
| PINIO | Przełącznik 9V | GPIO81 | RELAY1_PIN | 81 | ||
| ADC | Pad Vbat | BATT_VOLTAGE_SENS | 6~36V | BATT_VOLT_PIN BATT_VOLT_MULT |
10 21.0 |
|
| Pad Curr | BATT_CURRENT_SENS | 0~3.3V | BATT_CURR_PIN BATT_AMP_PERVLT |
11 X |
||
| Pad VB2 | BATT2_VOLTAGE_SENS | 0~69V | BATT2_VOLT_PIN BATT2_VOLT_MULT |
18 21.0 |
||
| Pad CU2 | BATT2_CURRENT_SENS | 0~3.3V | BATT2_CURR_PIN BATT2_AMP_PERVLT |
8 X |
||
| I2C | SCL/SDA | I2C3 | 5V tolerancyjne I/O | na pokładzie Baro SPL06-001 | Adres | 0x76 |
| Cyfrowa prędkość powietrza I2C MS4525 DLVR-L10D |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
0 1 9 |
||||
| Magnetometr | COMPASS_AUTODEC | 1 | ||||
| CAN | C-H/C-L | CAN2 | 5V tolerancyjne I/O | CAN | CAN_D1_PROTOCOL CAN_P1_DRIVER |
1 1 |
MOŻLIWE GPS MOŻLIWE Kompas MOŻLIWE Czujnik prędkości powietrza |
TYP_GPS MASKA_TYPU_KOMPASU TYP_ARSPD |
9 0 8 |
| UART | USB | USB | konsola | PROTOKÓŁ_SERIAL0 | 2 | |
| TX1 RX1 | USART1 z DMA | I/O tolerujące 5 V | Telemetria | PROTOKÓŁ_SERIAL1 | 2 | |
| TX2 RX2 | USART2 z DMA | I/O tolerujące 5 V | Wejście RC/Odbiornik | PROTOKÓŁ_SERIAL2 | 23 | |
| TX3 RX3 | USART3 z DMA | I/O tolerujące 5 V | GPS | PROTOKÓŁ_SERIAL3 | 5 | |
| TX4 RX4 | UART4 bez DMA | I/O tolerujące 5 V | Zapasowy | PROTOKÓŁ_SERIAL4 | -1 | |
| TX5 RX5 | UART5 bez DMA | I/O tolerujące 5 V | Zapasowy | PROTOKÓŁ_SERIAL5 | -1 | |
| TX6 RX6 | USART6 bez DMA | I/O tolerujące 5 V | Zapasowy | PROTOKÓŁ_SERIAL6 | -1 | |
WEJŚCIE RC
Wejście RC jest skonfigurowane na USART2 (SERIAL2).Obsługuje wszystkie protokoły RC szeregowe. SERIAL2_PROTOCOL=23 domyślnie.
- PPM nie jest obsługiwany.
- CRSF wymaga połączenia Tx2 & Rx2 i ustawienia SERIAL2_OPTIONS na „0” (domyślnie).
- SBUS/DSM/SRXL łączy się z pinem Rx2, ale SBUS wymaga, aby SERIAL2_OPTIONS było ustawione na „3”.
- FPort wymaga połączenia z Tx2 i ustawienia SERIAL2_OPTIONS na „7”. Jeśli telemetria nie działa, spróbuj ustawić SERIAL7_OPTIONS = 135.
- SRXL2 wymaga połączenia z Tx2 i automatycznie zapewnia telemetrię. Ustaw SERIAL2_OPTIONS na „4”.
- Każdy UART może być używany do połączeń systemów RC w ArduPilot, a także jest kompatybilny ze wszystkimi protokołami z wyjątkiem PPM. Zobacz Systemy Zdalnego Sterowania po szczegóły.
Przekaźnik ArduPilot (PINIO)
- Wyjście 9V włączone domyślnie
- PC13 PINIO1 WYJŚCIE GPIO(81) // zasilanie 9V switche.g.
- FUNKCJA_RELAY1 1
- PIN_RELAY1 81 // PINIO1 GPIO
- OPCJA_RC7 28 // Włącz/Wyłącz przekaźnik, użyj CH7 nadajnika, aby ustawić 9V WŁ./WYŁ.
Skonfigurowana funkcja zostanie uruchomiona, gdy wartość pwm przełącznika pomocniczego przekroczy 1800. Zostanie dezaktywowana, gdy wartość spadnie poniżej 1200.
Sprawdź wartość pwm wysyłaną z nadajnika, gdy przełącznik jest w pozycji wysokiej i niskiej, używając ekranu Wstępna konfiguracja >> Obowiązkowy sprzęt >> Kalibracja radia.Jeśli nie wzrasta powyżej 1800 ani nie spada poniżej 1200, najlepiej dostosować punkty końcowe serwomechanizmu w nadajniku.
Related Collections


