




BetaFPV Matrix 1S Bezszczotkowy Kontroler Lotu AIO 3W1/4W1, STM32G473, ELRS 2.4G, 12A/18A
BetaFPV Matrix 1S Bezszczotkowy Kontroler Lotu AIO 3W1/4W1, STM32G473, ELRS 2.4G, 12A/18A
BETAFPV
Nie można załadować gotowości do odbioru
Przegląd
Kluczowe cechy
- Dwie architektury: 3IN1 dla budowli HD cyfrowych (z portem VTX HD cyfrowego SH1.0-6Pin i wtyczkami silnika) oraz 4IN1 dla budowli analogowych (z OSD i zewnętrznymi padami lutowniczymi do analogowego VTX).
- MCU: STM32G473CEU6 (168MHz); podawane jako 55% szybsze przetwarzanie niż F411.
- Wyjście ESC: 12A ciągłe, 18A szczytowe; obsługuje DSHOT300 i DSHOT600.
- Nowy BEC: 5V/3A; niezależny od IMU projekt zasilania LDO 3.3V.
- Wbudowany odbiornik Serial ELRS 2.4GHz (V3.4.3), protokół CRSF.
- Uwaga dotycząca trwałości: płyta 1mm; cechy instalacji bez lutowania w wersji 3IN1.
Specyfikacje
Kontroler lotu (FC)
| MCU | STM32G473CEU6 (168MHz) |
| Żyroskop | ICM42688P |
| Maksymalna częstotliwość próbkowania żyroskopu (tabela porównawcza) | ICM42688P, 8KHz |
| Pamięć Blackbox | 16MB (również pokazane jako 16M) |
| Czujnik | Napięcie & prąd |
| BEC | 5V/3A |
| Niezależne zasilanie IMU | 3.3V LDO (LDO niezależne od IMU) |
| ESC (na pokładzie) | 12A ciągłe |
| RX | Serial ELRS 2.4GHz (V3.4.3) |
| Port USB | SH1.0-4Pin |
| Złącze akumulatora | BT2.0 |
| Złącze silnika | JST1.25-3Pin (znane również jako JST1.25) |
| Rozmiar montażu | 25.5mm x 25.5mm |
Wejścia/Wyjścia specyficzne dla wersji
| UART (3IN1) | UART 1 (tylko RX/SBUS), UART 2 (wolny), UART 3 (dla RX), UART 4 (wolny/HD MSP) |
| UART (4IN1) | UART 1 (dla VTX), UART 2 (wolny), UART 3 (dla RX), UART 4 (BRAK) |
| OSD | AT7456E (tylko wersja 4IN1) |
| Port HD cyfrowego VTX | SH1.0-6Pin (tylko wersja 3IN1) |
Waga
| 3IN1 | 3.8±0.1g (złącze akumulatora wyłączone); 4.2±0.1g (złącze akumulatora włączone) |
| 4IN1 | 3.6±0.1g (złącze akumulatora wyłączone); 4.6±0.1g (złącze akumulatora w zestawie) |
ESC
| Wejście zasilania | tylko 1S |
| Prąd | 12A ciągły, 18A szczytowy |
| Protokół sygnału cyfrowego | DSHOT300, DSHOT600 |
| Oprogramowanie ESC | A_X_5_96_v0.19.2.hex dla oprogramowania BB51 Bluejay |
Tabela porównawcza (zgodnie z dostarczonymi danymi)
| Matrix 1S 3IN1 | Matrix 1S 4IN1 | F4 1S 5A AIO | |
| MCU | STM32G473CEU6 | STM32F411CEU6 | |
| Częstotliwość MCU | 168MHz | 108MHz | |
| Żyroskop, maks. częstotliwość próbkowania | ICM42688P, 8KHz | BMI270, 3.2KHz | |
| ESC | 12A ciągłe | 1S, 5A | |
| Pamięć Blackbox | 16M | 8M | |
| OSD | - | Betaflight OSD: AT7456E | |
| RX | Wbudowany Serial ELRS 2.4GHz | ||
| Wtyczka silnika | JST1.25 | ||
| Waga | 3.8g | 3.6g | 3.64g |
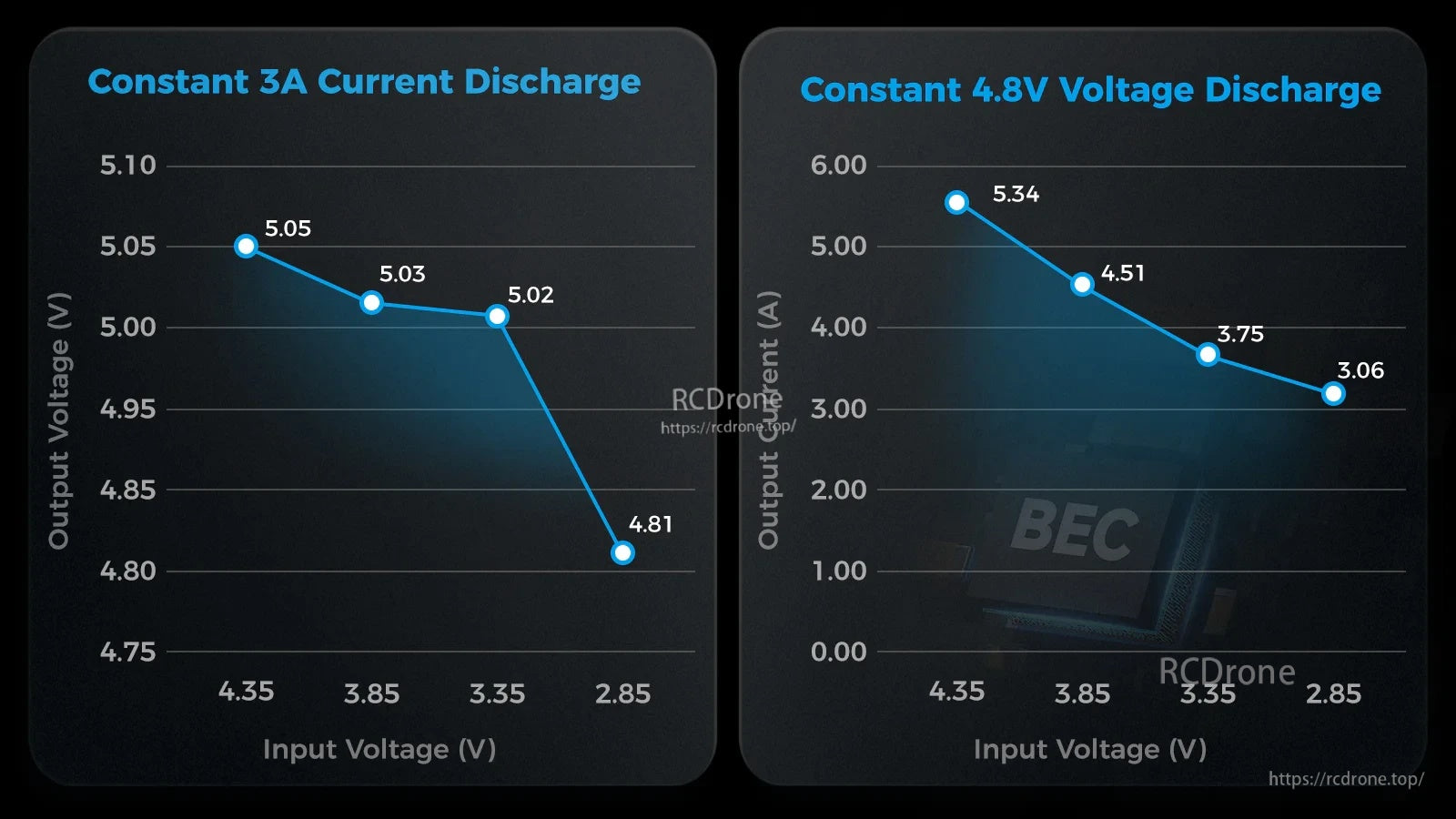
Dane testowe BEC (jak pokazano)
- Stały prąd rozładowania 3A: Wejście 4.35V → Wyjście 5.05V; 3.85V → 5.03V; 3.35V → 5.02V; 2.85V → 4.81V
- Stałe napięcie rozładowania 4.8V: Wejście 4.35V → Wyjście 5.34A; 3.85V → 4.51A; 3.35V → 3.75A; 2.85V → 3.06A
Porty & Notatki konfiguracyjne (z diagramów)
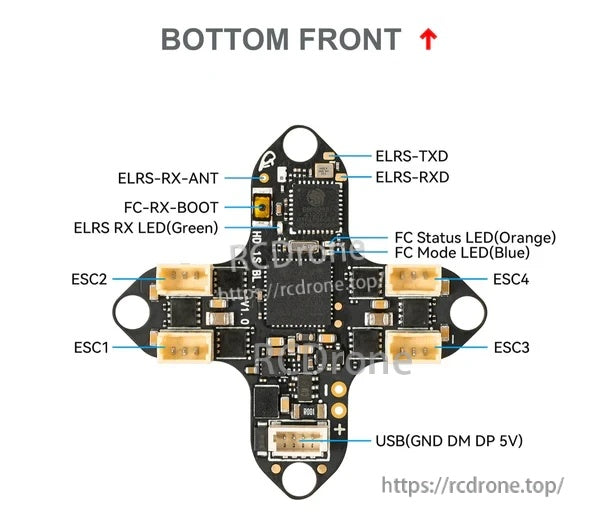
- Pinout USB pokazany: USB (GND, DM, DP, 5V).
- Etykiety płytki 3IN1 obejmują: RX3, RX2, TX2, TX3; BATT-, BATT+(1S), 5V, GND; SBUS (RX1), RX4, TX4; LED; ELRS-RX-ANT; ELRS-TXD, ELRS-RXD; FC-RX-BOOT; ELRS RX LED (Zielony); FC Status LED (Pomarańczowy); FC Mode LED (Niebieski); ESC1/ESC2/ESC3/ESC4.
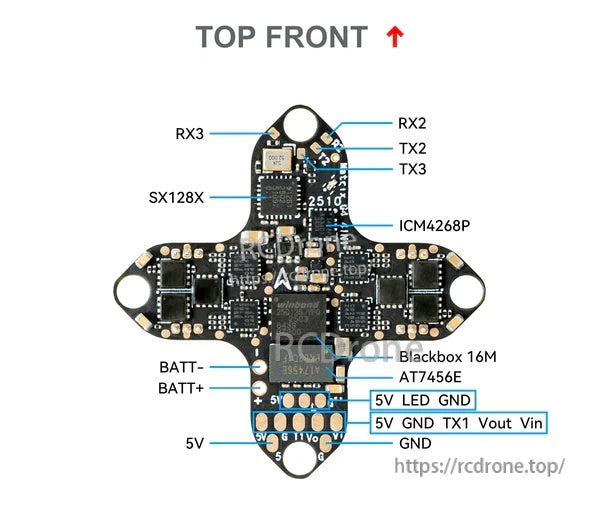
- Etykiety płytki 4IN1 obejmują: SX128X; ICM42688P; Blackbox 16M; AT7456E; ELRS-RX-ANT; ELRS-TXD, ELRS-RXD; ESP8285; STM32G473; FC-RX-BOOT; FC Status LED; FC-Mode LED; ESC1/ESC2/ESC3/ESC4; oraz etykiety padów, w tym 5V/LED/GND i 5V/GND/TX1/Vout/Vin.
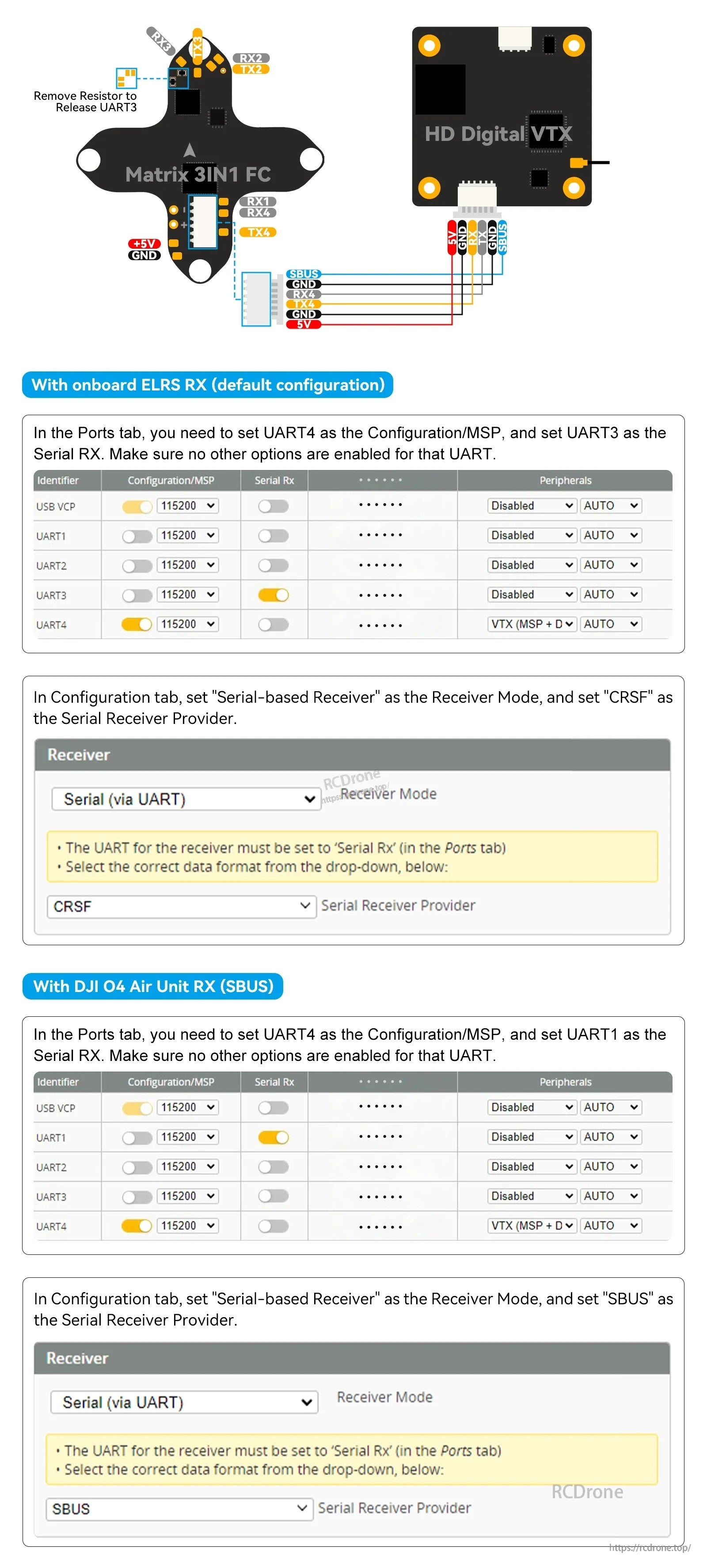
Konfiguracja portów Betaflight (3IN1)
- Z wbudowanym odbiornikiem ELRS RX (domyślnie): ustaw UART4 na Configuration/MSP i UART3 na Serial RX (żadne inne opcje nie są włączone dla UART3). Tryb odbiornika: Odbiornik oparty na szeregowej; Dostawca odbiornika szeregowego: CRSF.
- Z odbiornikiem DJI O4 Air Unit (SBUS): ustaw UART4 na Configuration/MSP i UART1 na Serial RX (żadne inne opcje nie są włączone dla UART1).Tryb odbiornika: Odbiornik oparty na szeregach; Dostawca odbiornika szeregowego: SBUS.
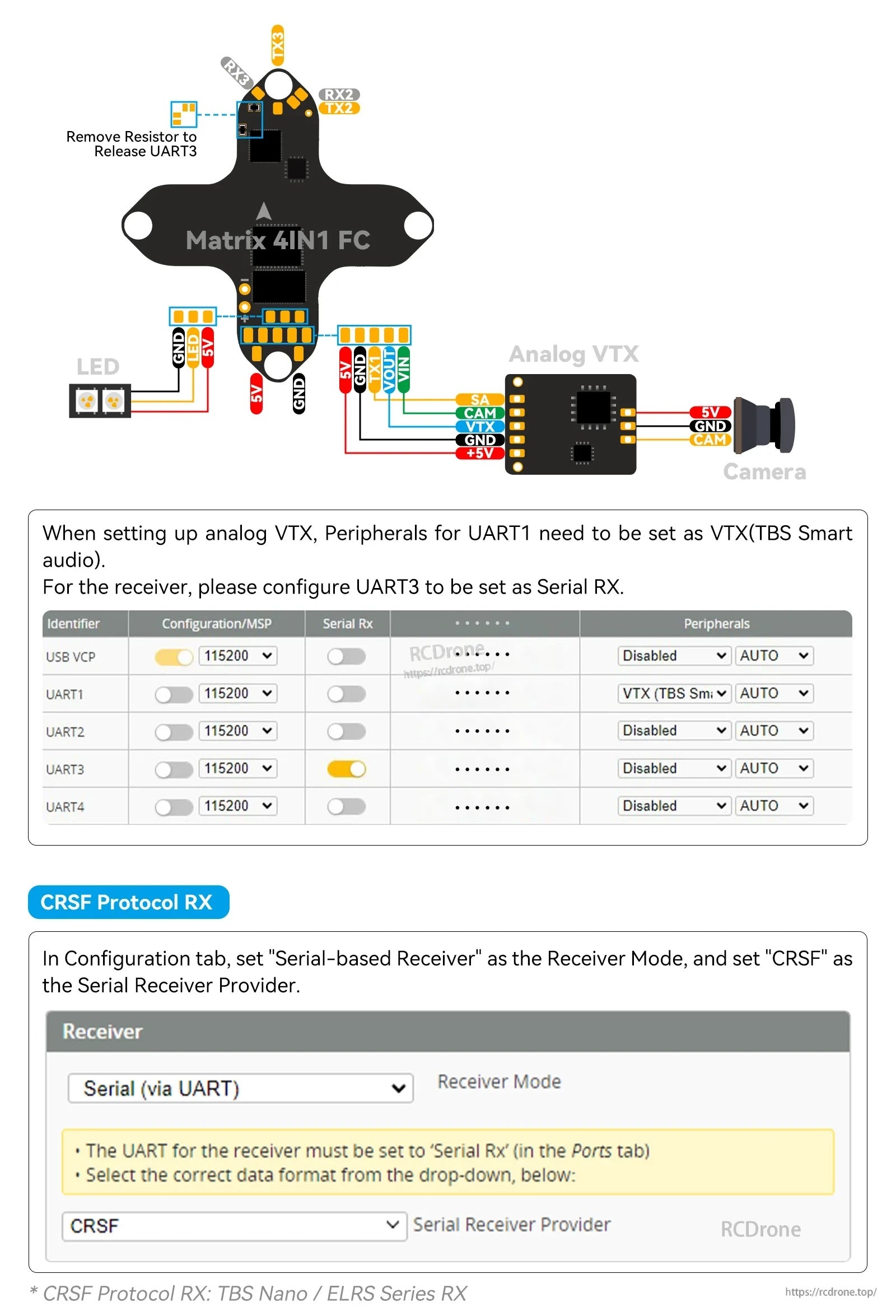
Konfiguracja portów Betaflight pokazana (4IN1)
- Podczas konfigurowania analogowego VTX: ustaw peryferia dla UART1 na VTX (TBS Smart audio).
- Dla odbiornika: skonfiguruj UART3 jako Serial RX.
- Uwaga dotycząca protokołu CRSF RX: TBS Nano / ELRS Series RX.
Oprogramowanie układowe
- Oprogramowanie układowe FC (3IN1): Betaflight_4.5.1_BETAFPVG473
- Oprogramowanie układowe FC (4IN1): Betaflight_4.5.2_BETAFPVG473_V2
- Podstawa oprogramowania układowego ESC (BB51 Bluejay): A_X_5_96_v0.19.2.hex (obsługuje DSHOT300/DSHOT600; wspomina o opcjach stałej częstotliwości PWM 24KHz/48KHz/96KHz oraz niestandardowych melodiach startowych)
Ważne: Począwszy od 5 stycznia 2026 roku, 3IN1 FC ma być dostarczany z żyroskopem BMI270. Zweryfikuj wersję żyroskopu przed wgraniem oprogramowania układowego. Matrix 1S 3IN1 i 4IN1 wymagają innego oprogramowania układowego.
Uwaga: Unikaj wgrywania oprogramowania ESC z krótszym interwałem; stwierdzono, że może to zwiększyć ryzyko zacięcia i uszkodzenia kontrolera lotu.
Podręczniki & Pobrania
- Oprogramowanie 3IN1 + zrzut CLI: https://support.betafpv.com/hc/en-us/articles/41037090524697-Firmware-for-Matrix-1S-Brushless-Flight-Controller-3IN1-HD
- Oprogramowanie 4IN1 + zrzut CLI: https://support.betafpv.com/hc/en-us/articles/48215862783769-Firmware-for-Matrix-1S-Brushless-Flight-Controller-4IN1
- Notatki wydania Betaflight 4.5.1: https://github.com/betaflight/betaflight/releases/tag/4.5.1
- Notatki wydania Betaflight 4.5.2: https://github.com/betaflight/betaflight/releases/tag/4.5.2
- Projekt Bluejay: https://github.com/bird-sanctuary/bluejay
- Wydania Bluejay: https://github.com/bird-sanctuary/bluejay/releases
- Kreator ESC: https://preview.esc-configurator.com/
- BLHeliSuite16714903: https://github.com/4712/BLHeliSuite/releases/tag/16714903
- Przewodnik po wgrywaniu oprogramowania ELRS: https://support.betafpv.com/hc/en-us/articles/4404231679129-How-to-Flash-Firmware-of-ELRS-RX-TX
Co jest w zestawie
Pakiet kontrolera lotu Matrix 1S bezszczotkowego (3IN1)
- 1 * Kontroler lotu Matrix 1S bezszczotkowy (3IN1)
- 1 * Adapter Type-C do SH1.0
- 1 * Kabel adaptera SH1.0-4Pin
- 1 * Kabel adaptera SH1.0-6Pin
- 4 * M1.2*4 Wkręty samowiercące
- 4 * M1.4*5 Wkręty samowiercące
- 4 * Piłki amortyzujące
Matrix 1S Kontroler lotu bezszczotkowego (4IN1) pakiet
- 1 * Matrix 1S Kontroler lotu bezszczotkowego (4IN1)
- 1 * Adapter Type-C do SH1.0
- 1 * Kabel adaptera SH1.0-4Pin
- 4 * M1.2*4 Wkręty samowiercące
- 4 * M1.4*5 Wkręty samowiercące
- 4 * Piłki amortyzujące
Uwaga
- Stworzony dla nowicjuszy i pilotów rekreacyjnych, Matrix FC wykorzystuje płytkę o grubości 1 mm dla zwiększenia trwałości i jest zaprojektowany z myślą o łatwej instalacji.
- Kontrolery lotu są objęte gwarancją na wady fabryczne. Problemy wynikające z błędów użytkownika, uszkodzeń w wyniku upadków, uszkodzeń podczas instalacji lub demontażu, modyfikacji, przepięć, pożarów elektrycznych lub kontaktu z wodą nie są objęte gwarancją.
W przypadku pytań dotyczących kompatybilności (wybór 3IN1 vs 4IN1, okablowanie lub oprogramowanie), skontaktuj się z pomocą techniczną pod adresem https://rcdrone.top/ lub [email protected].
Szczegóły

Wybierz między płytką 3IN1 dla cyfrowych budów HD a opcją 4IN1, która dodaje wsparcie dla Betaflight OSD i analogowego VTX.


Zaktualizowany BEC 5V/3A charakteryzuje się stabilnym wyjściem przy typowych napięciach wejściowych 1S.

Łączniki bez lutowania upraszczają instalację, z dedykowanym portem VTX HD cyfrowego i wtyczkami silnika przewodów.

Dla analogowych budów wersja 4IN1 zapewnia pady lutownicze do podłączenia zewnętrznego analogowego VTX.

Notatki konfiguracyjne obejmują typowe mapowanie portów Betaflight dla cyfrowych budów HD oraz wbudowany odbiornik Serial ELRS.
Wskazówki dotyczące konfiguracji koncentrują się na okablowaniu analogowego VTX i ustawieniach CRSF dla wbudowanego odbiornika Serial ELRS.

Dołączone akcesoria wspierają szybkie ustawienie i instalację na ławce, z adapterem USB, kablem i elementami montażowymi.

Related Collections





