

MUWEIDU K4028 Silnik 12V FOC Serwo Bezszczotkowy Silnik DC, Enkoder 18bit, RS485/CAN, 560obr/min
MUWEIDU K4028 Silnik 12V FOC Serwo Bezszczotkowy Silnik DC, Enkoder 18bit, RS485/CAN, 560obr/min
MUWEIDU
Nie można załadować gotowości do odbioru
Przegląd
MUWEIDU Silnik K4028 to silnik bezszczotkowy prądu stałego z serii K, zaprojektowany jako silnik serwo FOC o wysokiej wydajności z zintegrowanym koncepcją napędu elektrycznego. Jest wyposażony w enkoder 18-bitowy, wspiera kontrolę prędkości/pozycji i komunikuje się za pomocą RS485 lub CAN w celu integracji z systemami robotyki i automatyzacji.
Kluczowe cechy
- Silnik bezszczotkowy DC serii K o średniej i wysokiej prędkości; silnik serwo o wysokiej wydajności FOC
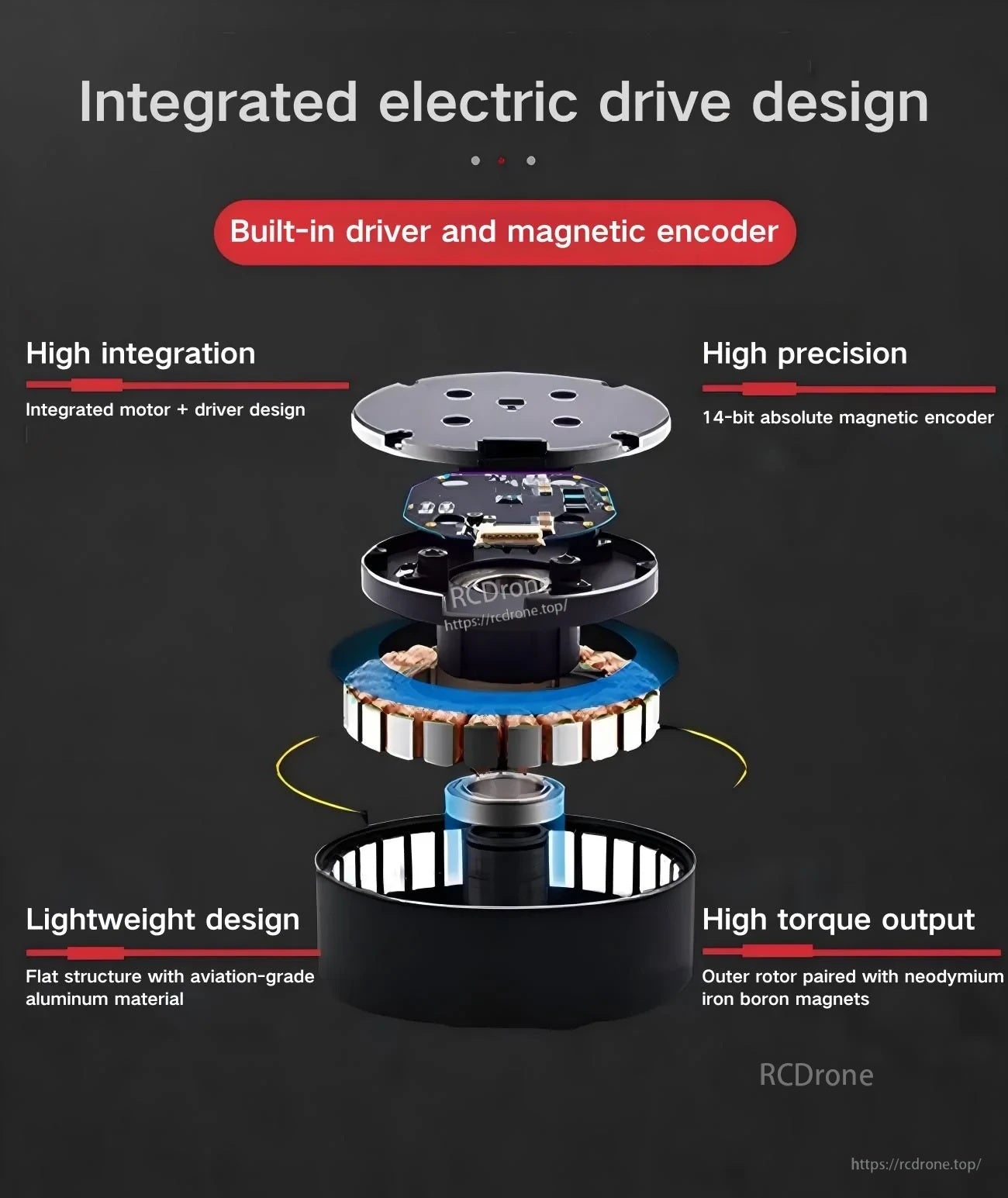
- Zintegrowany projekt napędu elektrycznego; wbudowany sterownik i enkoder magnetyczny
- Zintegrowany projekt silnika + sterownika
- Lekka, płaska struktura z materiału aluminiowego klasy lotniczej
- Wysoka moc wyjściowa; wirnik zewnętrzny połączony z magnesami neodymowymi żelaza i boru
- Monitorowanie temperatury silnika: TAK
- Wielokrotne tryby sterowania: Tryb momentu, Tryb prędkości, Tryb wielokrotnego obrotu (z ograniczeniem prędkości), Tryb pojedynczego obrotu + kierunek (z ograniczeniem prędkości), Tryb pozycji inkrementalnej (z ograniczeniem prędkości)
- Dostępne dostrajanie parametrów / testowanie / aktualizacja oprogramowania układowego na komputerze PC
- Kompatybilny z platformami rozwoju open-source, w tym PC, MCU, PLC, komputerami przemysłowymi i Raspberry Pi
- Wielowarstwowe mechanizmy ochrony; funkcja hamulca zarezerwowana (Hamulce / Zwolnienie hamulca)
- Obsługa wejścia PWM
- Optymalny moment zrywu silnika
- Uwaga dotycząca aktualizacji precyzji enkodera: z 14-bitowego na 18-bitowy
Specyfikacje
| Model | K4028 |
| Napięcie znamionowe | 12V |
| Prąd znamionowy | 1.43A |
| Moc szczytowa | 8.9W |
| Moment obrotowy nominalny | 0.15 N.m |
| Moment obrotowy szczytowy | 0.33 N.m |
| Prędkość nominalna | 560 rpm |
| Enkoder | 18bit |
| Bezładność wirnika | 81 gcm² |
| Monitorowanie temperatury silnika | TAK |
| Tryby sterowania | Prędkość/Pozycja |
| Protokół komunikacyjny | RS485 lub CAN |
| Wymiary całkowite | Φ39.6mm × 28mm |
| Waga | 90 g |
Definicja interfejsu (CAN/RS485)
| Interfejs | Uwaga |
|---|---|
| B/L | RS485-B lub CAN-L |
| A/H | RS485-A lub CAN-H |
| V- | Ujemne zasilanie |
| V- | Ujemne zasilanie |
| V+ | Dodatnie zasilanie |
| V+ | Dodatnie zasilanie |
| T | Transmiter UART |
| R | Odbiornik UART |
| G | GND sygnałowe |
Przełącznik ID jest dostępny na silniku do identyfikacji/ustawienia.
Aplikacje
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
- Systemy robotów inspekcyjnych
- Systemy kamer ręcznych
- Platformy związane z LiDAR
- Systemy gimbala
Podręczniki / Dokumenty
Aby uzyskać wskazówki dotyczące wyboru lub wsparcia w integracji silnika MUWEIDU K4028 (RS485/CAN), skontaktuj się z [email protected] or odwiedź https://rcdrone.top/.
Szczegóły

Zbudowany wokół zintegrowanej koncepcji napędu elektrycznego, K4028 łączy w sobie kompaktowy silnik BLDC, sterownik i enkoder dla precyzyjnej kontroli serwo.
Silnik + sterownik w jednym pomaga zredukować okablowanie i upraszcza integrację w budowach robotyki i automatyzacji.

Przejrzyste oznaczenia interfejsu wspierają szybkie ustawienie komunikacji RS485 lub CAN, z przełącznikiem ID do identyfikacji urządzenia w magistrali.
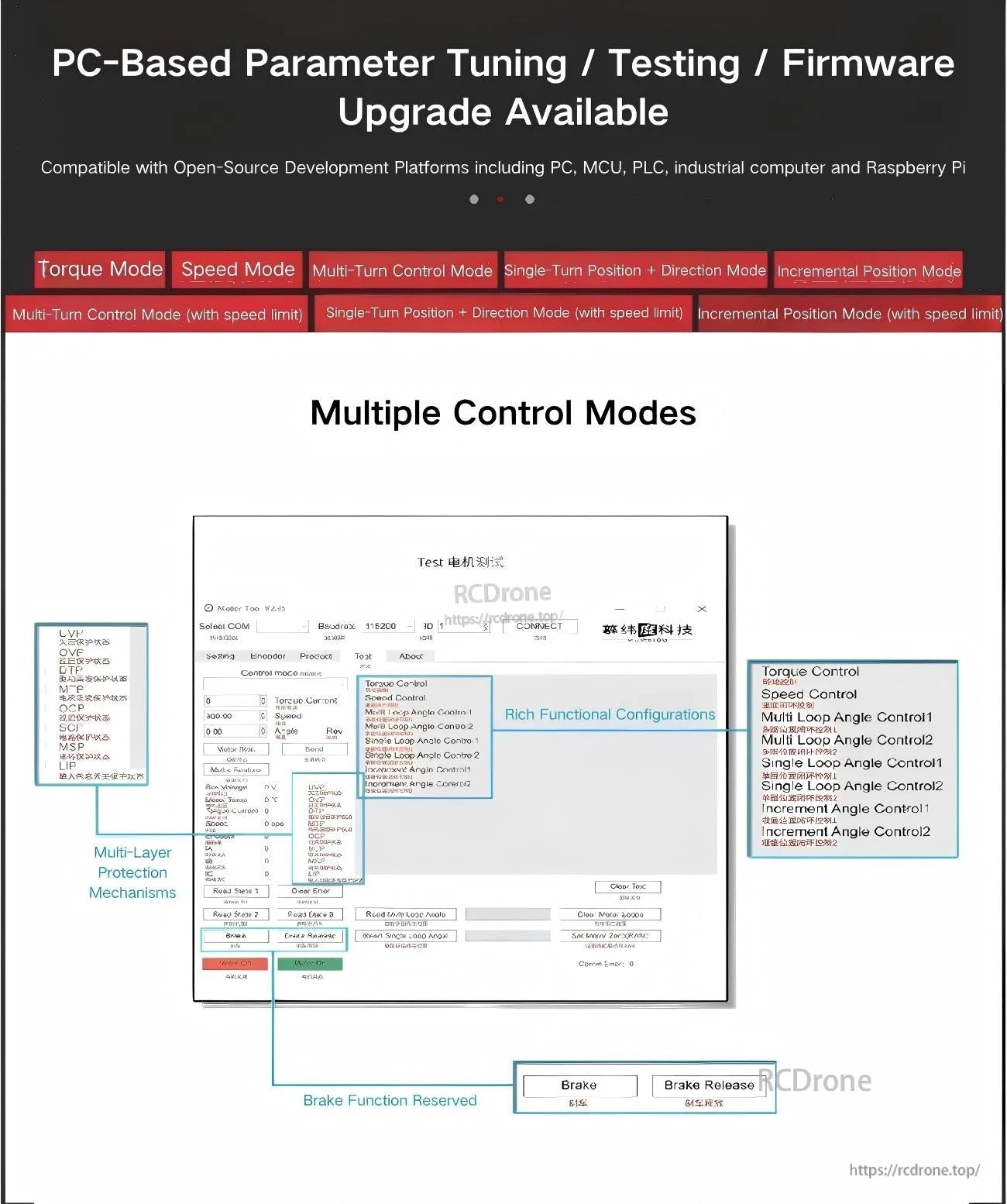
Narzędzia PC umożliwiają dostosowywanie parametrów, testowanie i aktualizacje oprogramowania, z wieloma trybami kontroli momentu obrotowego, prędkości i pozycji dostępnymi.
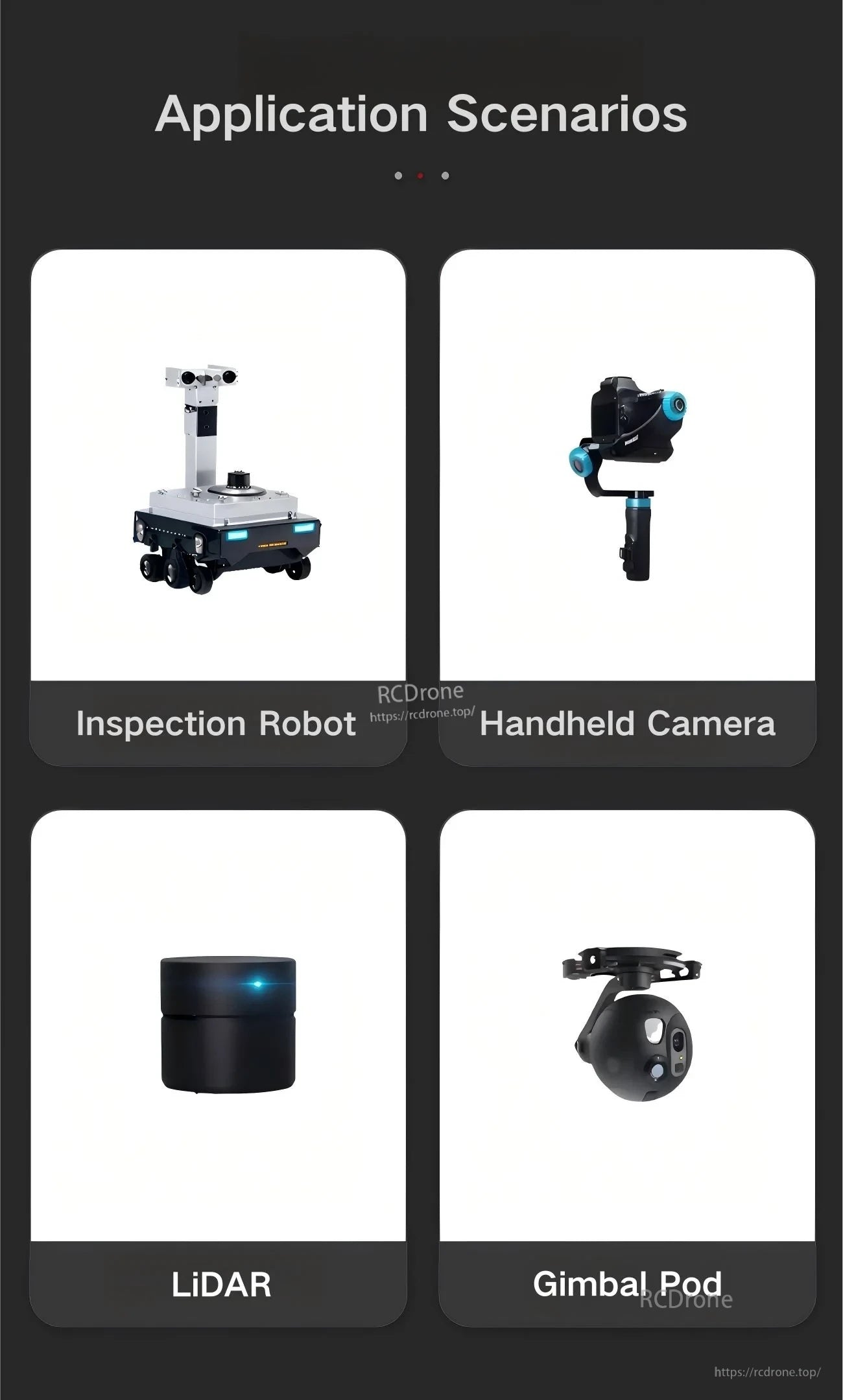
Idealne do kompaktowych zadań sterowania ruchem, takich jak roboty inspekcyjne, gimbale i platformy związane z LiDAR.
Related Collections

