

MUWEIDU K4030 Silnik serwo 16V 750obr./min 0,65N.m Moment szczytowy Enkoder 18bit RS485/CAN
MUWEIDU K4030 Silnik serwo 16V 750obr./min 0,65N.m Moment szczytowy Enkoder 18bit RS485/CAN
MUWEIDU
Nie można załadować gotowości do odbioru
Przegląd
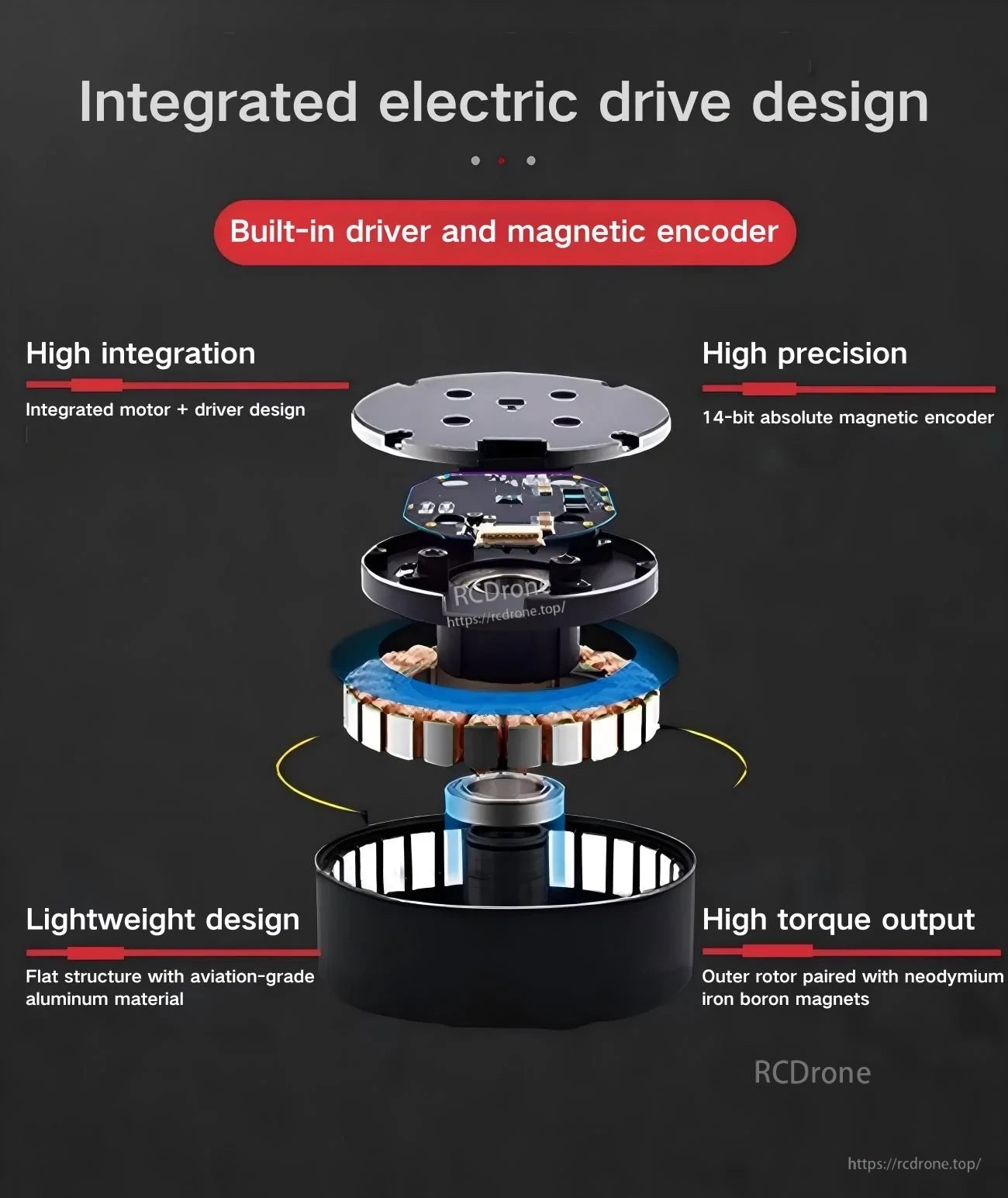
MUWEIDU Silnik K4030 to silnik bezszczotkowy prądu stałego z serii K o średniej i wysokiej prędkości (silnik serwo), z zintegrowanym projektem napędu elektrycznego (wbudowany sterownik i enkoder magnetyczny). Obsługuje kontrolę prędkości/pozycji i komunikuje się za pomocą RS485 lub CAN, co czyni go odpowiednim do kompaktowych robotów i aktuatorów mechatronicznych.
Kluczowe cechy
- Silnik serwo FOC o wysokiej wydajności
- Zintegrowany projekt silnika + sterownika
- Wbudowany sterownik i enkoder magnetyczny
- Precyzja enkodera ulepszona z 14-bitów do 18-bitów
- Optymalny moment zrywu silnika
- Obsługa wejścia PWM
- Projekt produktu o ultra wysokim standardzie
- Dostępne dostrajanie parametrów / testowanie / aktualizacja oprogramowania na komputerze PC
- Kompatybilny z platformami rozwoju open-source, w tym PC, MCU, PLC, komputerami przemysłowymi i Raspberry Pi
- Wielokrotne tryby sterowania: Tryb momentu, Tryb prędkości, Tryb wielokrotnego obrotu (z ograniczeniem prędkości), Tryb pojedynczego obrotu + kierunek (z ograniczeniem prędkości), Tryb pozycji inkrementalnej (z ograniczeniem prędkości)
- Wielowarstwowe mechanizmy ochrony (tekst funkcji UI oprogramowania)
- Funkcja hamulca zarezerwowana (tekst funkcji UI oprogramowania)
Aplikacje
- Roboty humanoidalne
- Ramiona robotyczne
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
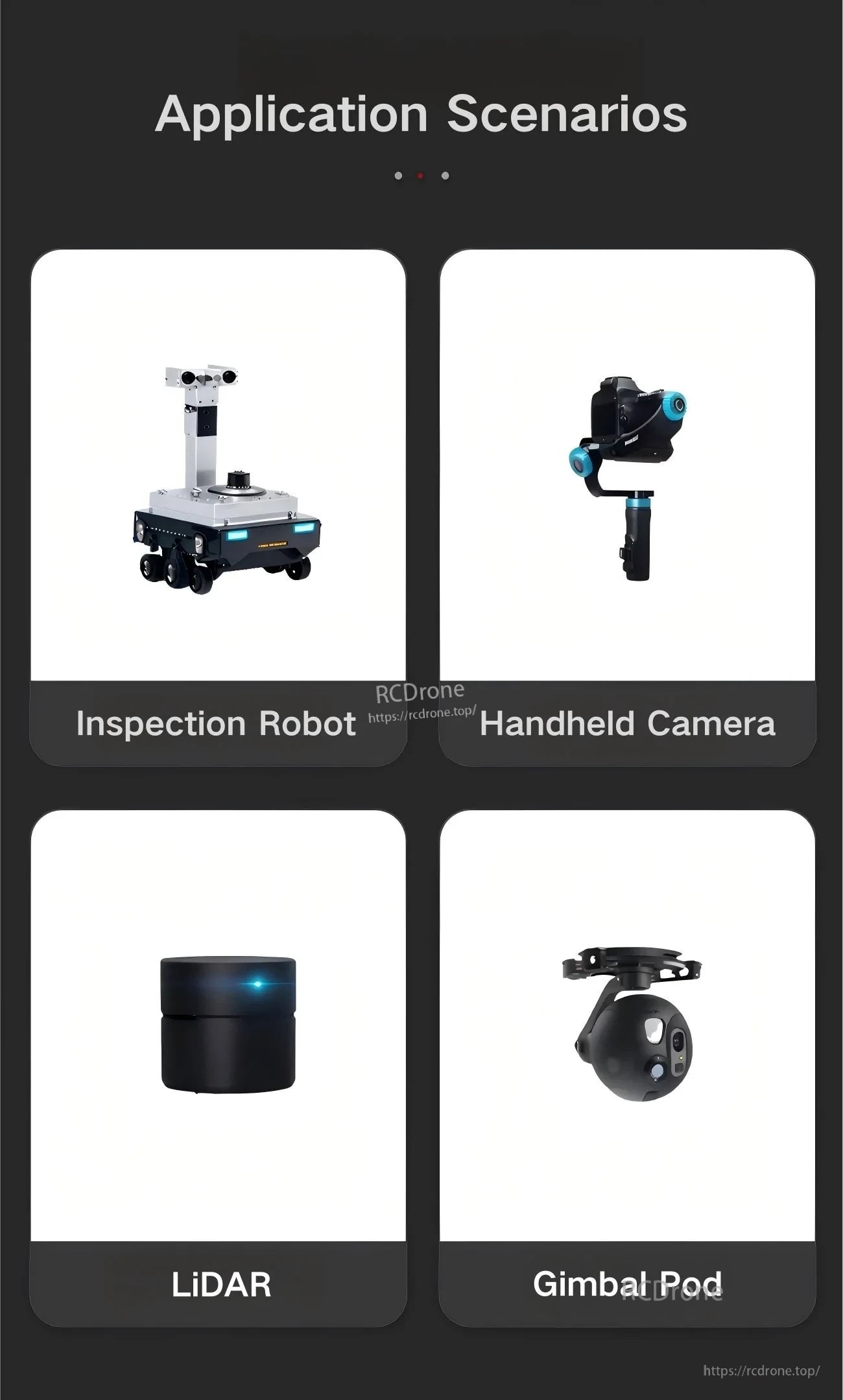
- Robot inspekcyjny
- Kamera ręczna
- LiDAR
- Gimbal/Pod
Specyfikacje
| Model | K4030 |
| Napięcie znamionowe | 16V |
| Prąd znamionowy | 2.2A |
| Moc szczytowa | 22W |
| Moment nominalny | 0.25N.m |
| Moment szczytowy | 0.65N.m |
| Prędkość nominalna | 750rpm |
| Enkoder | 18bit |
| Bezładność wirnika | 81gcm^2 |
| Monitorowanie temperatury silnika | TAK |
| Tryby sterowania | Prędkość/Pozycja |
| Protokół komunikacyjny | RS485 lub CAN |
| Wymiary całkowite | Φ39.6mm x 23mm |
| Waga | 65g |
Interfejs / Definicja pinów
Etykiety interfejsu: WYŁĄCZNIK ID, CAN/RS485.
| Interfejs | Uwaga |
|---|---|
| B/L | RS485-B lub CAN-L |
| A/H | RS485-A lub CAN-H |
| V- | Ujemne zasilanie |
| V- | Ujemne zasilanie |
| V+ | Dodatnie zasilanie |
| V+ | Dodatnie zasilanie |
| T | Nadajnik UART |
| R | Odbiornik UART |
| G | GND sygnałowe |
Podręczniki
W celu uzyskania wskazówek dotyczących wyboru lub wsparcia w zakresie integracji (okablowanie RS485/CAN, konfiguracja trybu sterowania lub pytania dotyczące dokumentacji), skontaktuj się z pomocą techniczną pod https://rcdrone.top/ lub wyślij e-mail na adres [email protected].
Szczegóły

Kompaktowy serwomotor serii K z zintegrowaną elektroniką napędową, zapewniający wysoką wydajność momentu obrotowego, prędkości i kontroli pozycji.
Zintegrowany silnik, sterownik i enkoder magnetyczny pomagają zredukować okablowanie i uprościć budowę kompaktowych robotycznych aktuatorów.

Jasne oznaczenia interfejsu ułatwiają podłączenie zasilania i konfigurację komunikacji RS485 lub CAN podczas integracji.

Strojenie i testowanie oparte na PC wspiera wiele trybów sterowania, z możliwością aktualizacji oprogramowania i funkcjami ochrony dostępnymi w oprogramowaniu.
Odpowiedni do projektów robotyki i stabilizacji, takich jak platformy inspekcyjne, gimbale i ładunki sensorów.
Related Collections

