

MUWEIDU K5020 Silnik FOC Serwo 16V 1100obr/min Enkoder 18-bitowy, Sterownik Zintegrowany RS485/CAN do Robotów
MUWEIDU K5020 Silnik FOC Serwo 16V 1100obr/min Enkoder 18-bitowy, Sterownik Zintegrowany RS485/CAN do Robotów
MUWEIDU
Nie można załadować gotowości do odbioru
Przegląd
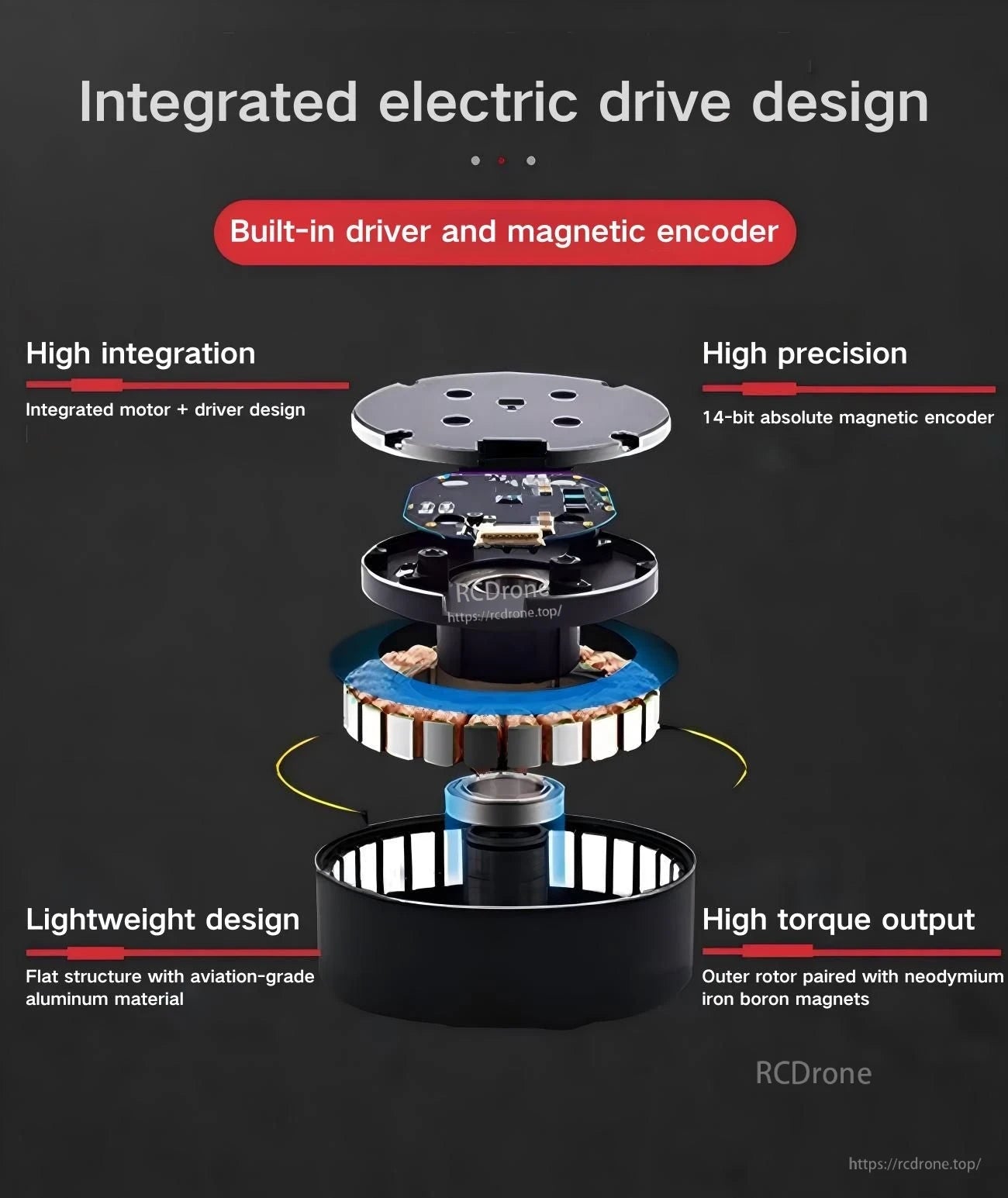
MUWEIDU K5020 Silnik to serwomotor bezszczotkowy prądu stałego o średniej i wysokiej prędkości z serii K, zaprojektowany z myślą o FOC. Wykorzystuje zintegrowany projekt napędu elektrycznego z wbudowanym sterownikiem i enkoderem magnetycznym, wspierającym kontrolę prędkości/pozycji oraz komunikację RS485 lub CAN.
Kluczowe cechy
- Silnik serwo FOC o wysokiej wydajności
- Zintegrowany projekt silnika + sterownika (wbudowany sterownik i enkoder magnetyczny)
- Zintegrowany, lekki, wysokoprecyzyjny, o wysokim momencie obrotowym
- Precyzja enkodera ulepszona z 14-bitów do 18-bitów
- Optymalny moment obrotowy silnika
- Obsługuje wejście PWM
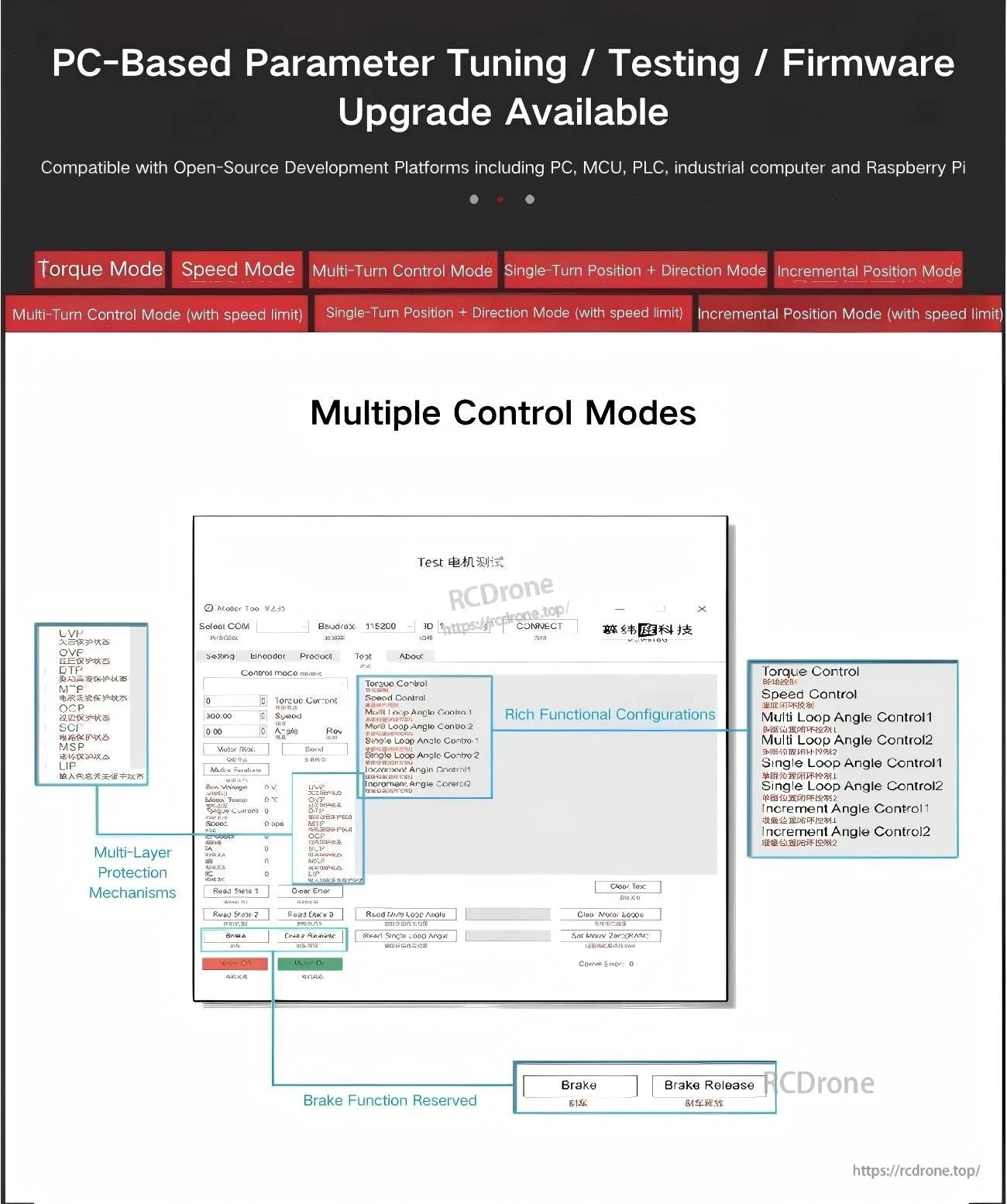
- Dostępne strojenie/testowanie parametrów/aktualizacja oprogramowania na komputerze PC
- Kompatybilny z platformami rozwoju open-source, w tym PC, MCU, PLC, komputerami przemysłowymi i Raspberry Pi
- Wielokrotne tryby sterowania: Tryb momentu, Tryb prędkości, Tryb wielokrotnego obrotu, Tryb pozycji + kierunku jednego obrotu, Tryb pozycji inkrementalnej
- Funkcja hamulca zarezerwowana (Hamulce / Zwolnienie hamulca pokazane)
Aby uzyskać pomoc w wyborze i wsparcie w integracji, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/.
Aplikacje
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
- Robot inspekcyjny
- Kamera ręczna
- LiDAR
- Uchwyt gimbala
Specyfikacje
| Model | K5020 |
| Napięcie znamionowe | 16V |
| Prąd znamionowy | 1.3A |
| Moc szczytowa | 15W |
| Moment obrotowy znamionowy | 0.12 N.m |
| Moment obrotowy szczytowy | 0.4 N.m |
| Prędkość oceniana | 1100 rpm |
| Enkoder | 18 bit |
| Inercja wirnika | 136 gcm^2 |
| Monitorowanie temperatury silnika | TAK |
| Tryby sterowania | Prędkość/Pozycja |
| Protokół komunikacyjny | RS485 lub CAN |
| Wymiary całkowite | Phi49mm x 23.9mm |
| Waga | 104 g |
Definicja interfejsu
- PRZEŁĄCZNIK ID
- Złącze CAN/RS485
| Interfejs | Uwaga |
|---|---|
| B/L | RS485-B lub CAN-L |
| A/H | RS485-A lub CAN-H |
| V- | Ujemne zasilanie |
| V- | Ujemne zasilanie |
| V+ | Dodatnie zasilanie |
| V+ | Dodatnie zasilanie |
| T | Transmiter UART |
| R | Odbiornik UART |
| G | GND sygnałowe |
Instrukcje& Pliki
Szczegóły

Zbudowany do projektów robotycznych, które potrzebują kompaktowego, zintegrowanego silnika serwo z wysoką precyzją sprzężenia zwrotnego i wsparciem PWM.
Zintegrowana konstrukcja silnika + sterownika pomaga uprościć okablowanie, jednocześnie utrzymując montaż w lekkiej formie dla ruchomych stawów.
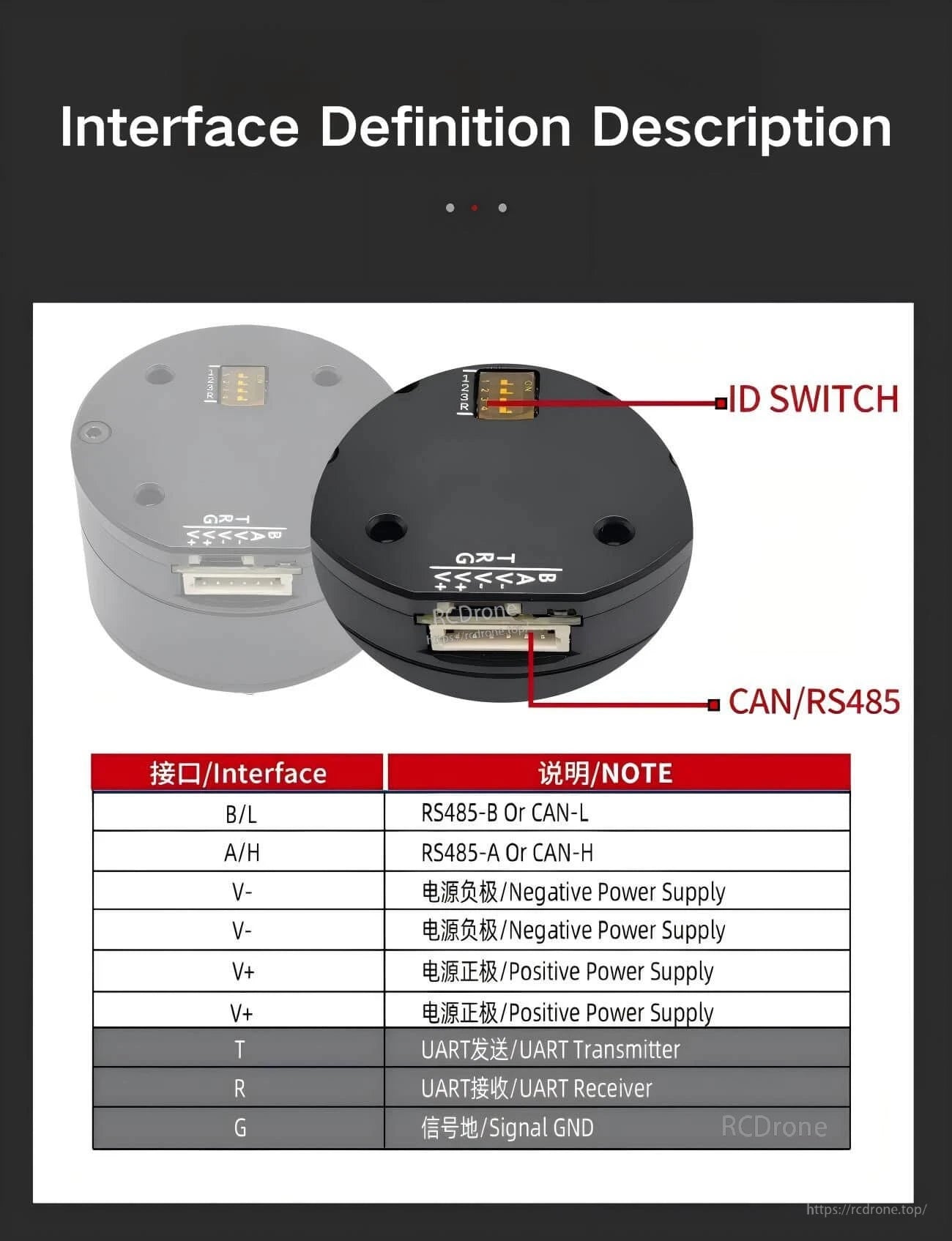
Jasne oznaczenia interfejsu ułatwiają ustawienie identyfikatora urządzenia oraz podłączenie CAN lub RS485 obok pinów zasilania i UART.

Related Collections

