

MUWEIDU K9050 Silnik FOC Servo, 24V, enkoder 18-bitowy, RS485/CAN, sterowanie prędkością/pozycją (16T/35T)
MUWEIDU K9050 Silnik FOC Servo, 24V, enkoder 18-bitowy, RS485/CAN, sterowanie prędkością/pozycją (16T/35T)
MUWEIDU
Nie można załadować gotowości do odbioru
Przegląd
MUWEIDU K9050 Silnik to bezszczotkowy silnik prądu stałego FOC servo z zintegrowanym projektem napędu (wbudowany sterownik) oraz enkoderem magnetycznym. Obsługuje kontrolę prędkości/pozycji z komunikacją RS485 lub CAN i zawiera monitorowanie temperatury silnika do integracji systemu w projektach robotyki i automatyzacji.
Kluczowe cechy
- Silnik bezszczotkowy DC serii K o średniej i wysokiej prędkości; silniki serwo
- Silnik serwo o wysokiej wydajności FOC
- Zintegrowany projekt napędu elektrycznego: wbudowany sterownik i enkoder magnetyczny (zintegrowany silnik + sterownik)
- Ulepszona precyzja enkodera: z 14-bit na 18-bit; 18-bitowy enkoder magnetyczny absolutny jednego obrotu z jednorazową kalibracją (pozycja zerowa nigdy nie jest tracona)
- Optymalny moment obrotowy silnika
- Wsparcie dla wejścia PWM
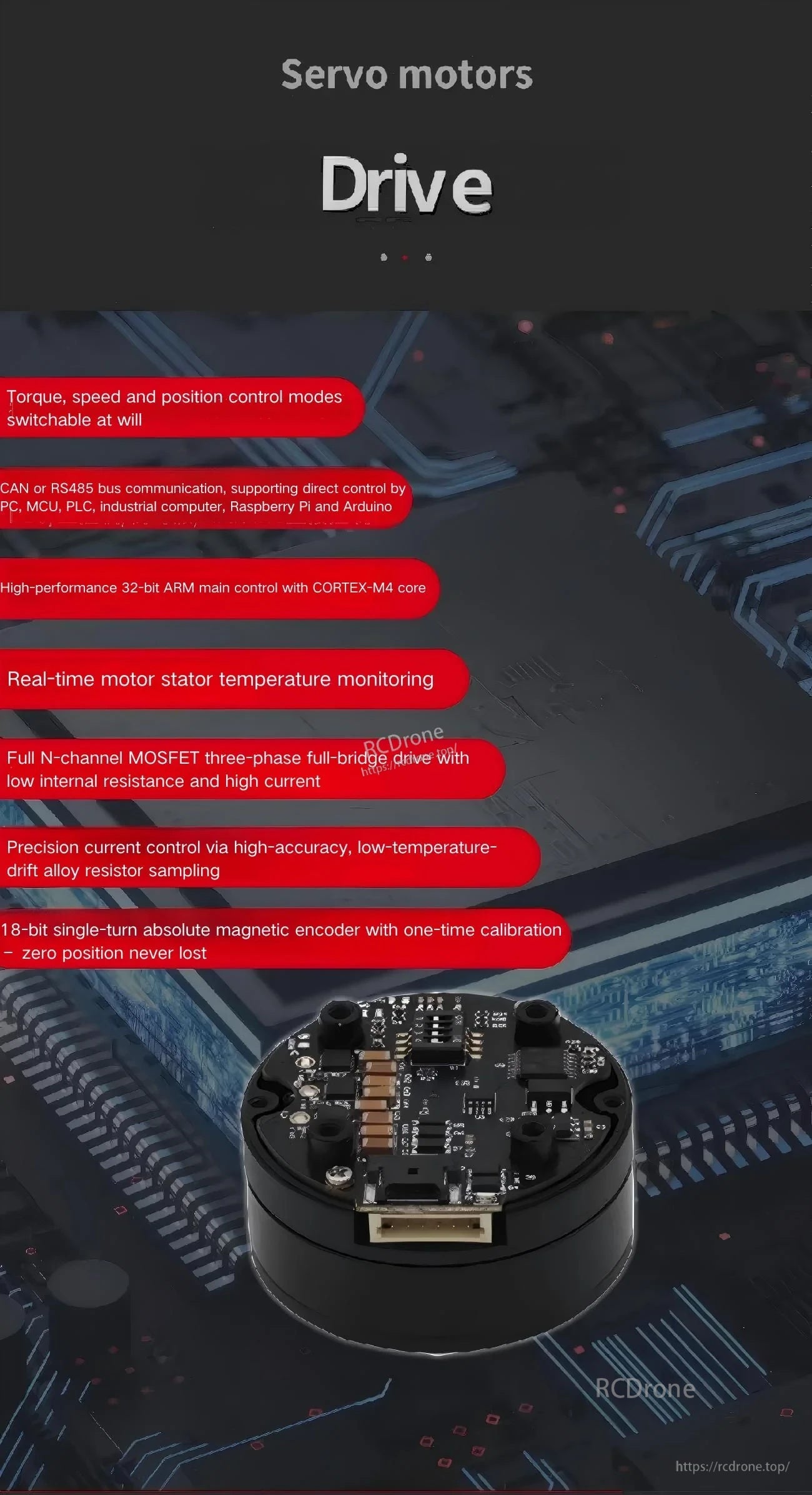
- Możliwość przełączania trybów kontroli momentu obrotowego, prędkości i pozycji
- Komunikacja przez magistralę CAN lub RS485; kompatybilność z platformami rozwoju open-source, w tym PC, MCU, PLC, komputerami przemysłowymi, Raspberry Pi i Arduino
- Wydajna główna kontrola 32-bitowa ARM z rdzeniem CORTEX-M4
- Monitorowanie temperatury statora silnika w czasie rzeczywistym
- Pełny napęd mostka trójfazowego N-channel MOSFET z niską rezystancją wewnętrzną i wysokim prądem
- Precyzyjna kontrola prądu za pomocą próbkowania rezystora stopowego o wysokiej dokładności i niskim dryfie temperaturowym
Specyfikacje
| Model | K9050 (16T/35T) |
| Napięcie znamionowe | 24V |
| Prąd znamionowy | 7.45A / 3.46A |
| Moc szczytowa | 170W / 38W |
| Moment obrotowy nominalny | 2.42 N.m / 2.79 N.m |
| Moment obrotowy szczytowy | 4.5 N.m / 5.8 N.m |
| Ocena prędkości | 490 rpm / 130 rpm |
| Enkoder | 18bit |
| Inercja wirnika | 4656 gcm² |
| Monitorowanie temperatury silnika | TAK |
| Tryby sterowania | Prędkość/Pozycja |
| Protokół komunikacyjny | RS485 lub CAN |
| Wymiary całkowite | Φ89mm x 53mm |
| Waga | 963 g |
Interfejs (Notatki dotyczące pinów złącza CAN/RS485)
| B/L | RS485-B lub CAN-L |
| A/H | RS485-A lub CAN-H |
| V- | Ujemne zasilanie |
| V+ | Dodatnie zasilanie |
| T | Transmiter UART |
| R | Odbiornik UART |
| G | Signal GND |
Również oznaczone: WYŁĄCZNIK ID oraz CAN/RS485 .
Aplikacje
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
- Robot inspekcyjny
- Kamera ręczna
- LiDAR
- Uchwyt gimbala
Podręczniki / Dokumenty
Aby sprawdzić zgodność lub uzyskać wsparcie w zakresie integracji (okablowanie RS485/CAN, dostosowywanie parametrów i wybór trybu sterowania), skontaktuj się z pomocą techniczną pod https://rcdrone.top/ lub wyślij e-mail na [email protected] .
Szczegóły

Kompaktowy silnik serwo 24V FOC zaprojektowany do robotyki i automatyzacji, z wbudowaną elektroniką napędową i sprzężeniem zwrotnym z absolutnego enkodera.
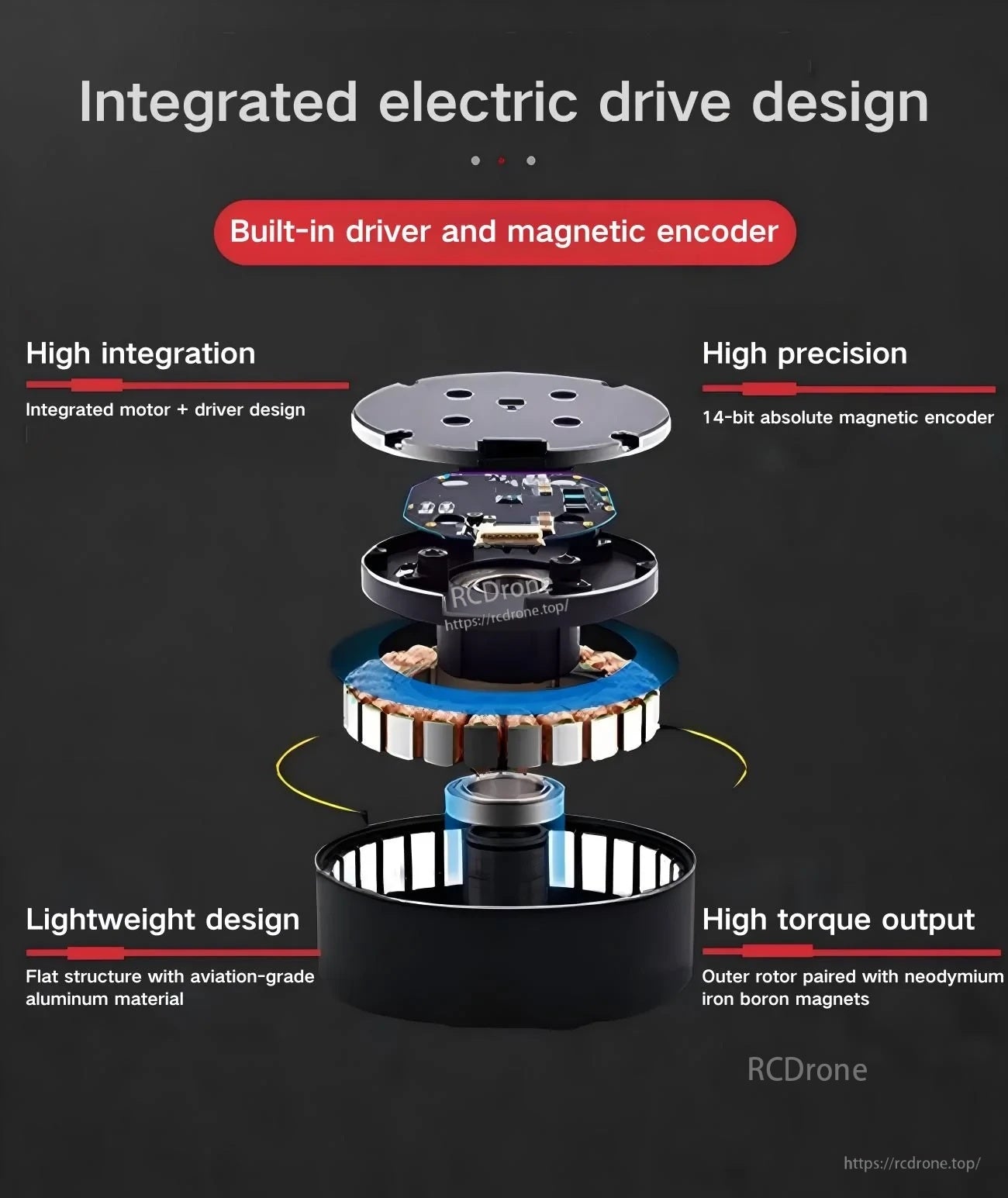
Zintegrowana konstrukcja silnika + sterownika upraszcza okablowanie i utrzymuje siłownik w lekkiej paczce, co jest idealne do ciasnych instalacji.
Przełączaj między kontrolą momentu obrotowego, prędkości i pozycji oraz łącz się przez CAN lub RS485 z wbudowanym monitorowaniem temperatury dla bezpieczniejszej integracji.

Wyraźne oznaczenia pinów dla okablowania magistrali CAN/RS485, zasilania, linii UART oraz wbudowanego przełącznika ID, aby wspierać konfiguracje wielowęzłowe.
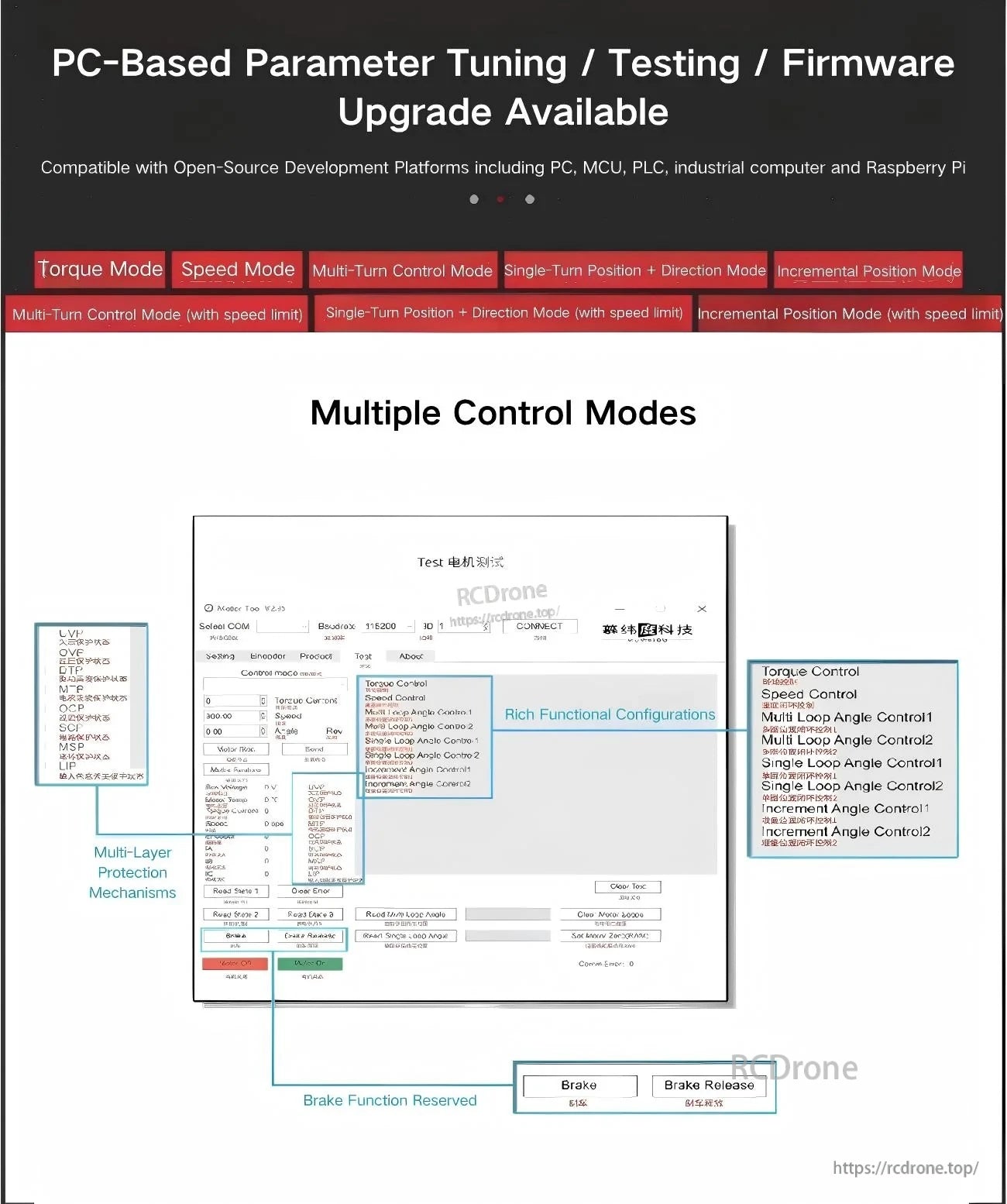
Wsparcie oprogramowania na PC pomaga przyspieszyć uruchamianie z dostosowywaniem parametrów, testowaniem i aktualizacjami oprogramowania układowego w różnych trybach sterowania.
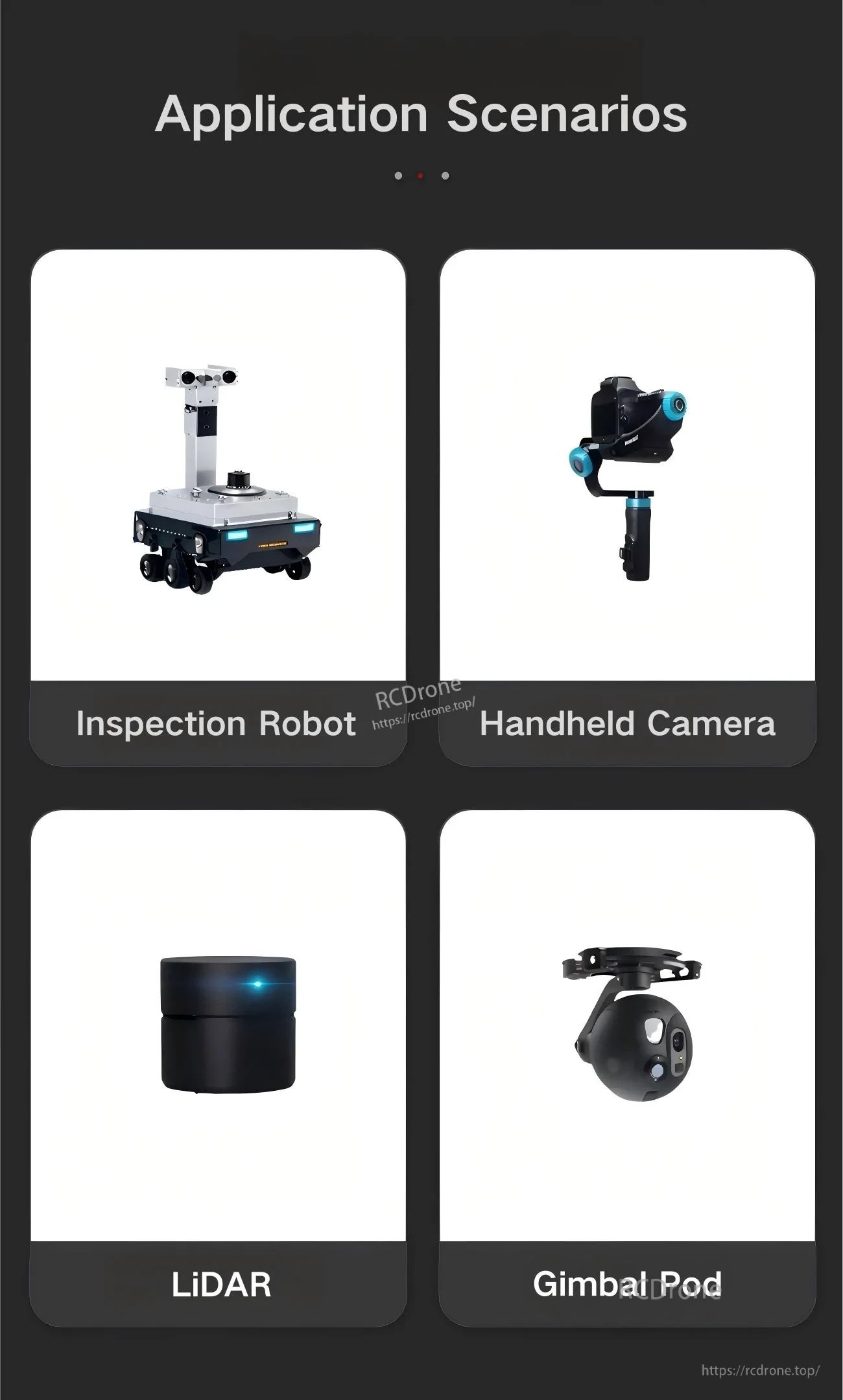
Stworzony do projektów kontroli ruchu, od mobilnych robotów inspekcyjnych po stabilizowane platformy kamer i czujników.
Related Collections

