

MUWEIDU L4030 Silnik bezszczotkowy DC Servo 16V 160obr./min 0,25N.m RS485/CAN Enkoder 15/18-bitowy
MUWEIDU L4030 Silnik bezszczotkowy DC Servo 16V 160obr./min 0,25N.m RS485/CAN Enkoder 15/18-bitowy
MUWEIDU
Nie można załadować gotowości do odbioru
Przegląd
MUWEIDU Silnik L4030 to silnik bezszczotkowy prądu stałego o niskiej prędkości i wysokiej precyzji serwo z zintegrowanymi funkcjami napędu elektrycznego do kontroli prędkości/pozycji. Obsługuje komunikację RS485 lub CAN i jest zaprojektowany do kompaktowych aplikacji ruchowych, które wymagają stabilnej, płynnej pracy.
Kluczowe cechy
- Pozycjonowanie serii: „Seria silników bezszczotkowych DC o niskiej prędkości i wysokiej precyzji”
- Mini serwomotory; konstrukcja z pustym wałem
- Stabilna & płynna praca
- Certyfikat CE
- Zintegrowana wysoka precyzja
- Lekka konstrukcja; wysoka wydajność momentu obrotowego
- Spełnia wymagania kontroli pozycji o niskiej prędkości i wysokiej precyzji
- Wysokowydajny 32-bitowy MCU umożliwia pełną kompatybilność serii MS ze wszystkimi poleceniami kontrolnymi serii MF
- Wysokiej jakości blachy stalowe silikonowe i wysokotemperaturowe, odporne na wysoką wydajność magnesy trwałe przyjęte jako podstawowe materiały silnika
- Zewnętrzna konstrukcja wirnika z wieloma spłaszczonymi etapami zapewnia wyższy moment obrotowy w zastosowaniach ograniczonych przestrzennie
- Bezszczotkowa struktura z wysokowydajnymi łożyskami dla płynniejszej rotacji i dłuższej żywotności
- Wysokoprecyzyjne, niskotemperaturowe oporniki stopowe do dokładnego próbkowania i kontroli prądu
- Pełny napęd mostka pełnofazowego N-channel z niską opornością wewnętrzną i wysokim wyjściem prądowym
- Obsługuje płynne przełączanie między trybami kontroli momentu, prędkości i pozycji
- Jednorazowa kalibracja; „pozycja zerowa nigdy nie jest tracona”
Specyfikacje techniczne
| Model | L4030 |
| Napięcie znamionowe | 16V |
| Prąd znamionowy | 1.1A |
| Moc szczytowa | 5.5W |
| Moment nominalny | 0.25N.m |
| Moment szczytowy | 0.35N.m |
| Prędkość nominalna | 160rpm |
| Enkoder | 15bit lub 18bit |
| Bezładność wirnika | 105gcm^2 |
| Monitorowanie temperatury silnika | TAK |
| Tryby sterowania | Prędkość/Pozycja |
| Protokół komunikacyjny | RS485 lub CAN |
| Wymiary całkowite | Phi39.6mm x 33mm |
| Waga | 112g |
Definicja interfejsu
- PRZEŁĄCZNIK ID
- CAN/RS485
| Interfejs | Uwaga |
|---|---|
| B/L | RS485-B lub CAN-L |
| A/H | RS485-A lub CAN-H |
| V- | Ujemne zasilanie |
| V- | Ujemne zasilanie |
| V+ | Dodatnie zasilanie |
| V+ | Dodatnie zasilanie |
| T | Transmiter UART |
| R | Odbiornik UART |
| G | GND sygnałowe |
Scenariusze aplikacji
- Roboty humanoidalne
- Ramiona robotyczne
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
- Kamera 360 stopni
- Kamera ręczna
- LiDAR
- Gimbal
Oprogramowanie PC / Funkcje sterowania (zgodnie z opisem)
- Parametryzacja / Testowanie / Aktualizacja oprogramowania na PC dostępna
- Kompatybilny z platformami rozwoju open-source, w tym PC, MCU, PLC, komputerami przemysłowymi i Raspberry Pi
- Wiele trybów sterowania: Tryb momentu; Tryb prędkości; Tryb kontroli wielokrotnego obrotu; Tryb pozycji + kierunku jednego obrotu; Tryb pozycji przyrostowej
- Z opcjami ograniczenia prędkości dla: Tryb kontroli wielokrotnego obrotu; Tryb pozycji + kierunku jednego obrotu; Tryb pozycji przyrostowej
- Wielowarstwowe mechanizmy ochronne
- Funkcja hamulca zarezerwowana (Hamulce / Zwolnienie hamulca)
Dokumenty
W przypadku wsparcia technicznego, pytań dotyczących integracji lub pomocy w dokumentacji, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/.
Szczegóły

Kompaktowa platforma mini serwomotorów zaprojektowana do niskiej prędkości, wysokiej precyzji ruchu w ciasnych przestrzeniach.

Zintegrowana elektronika napędowa wspiera stabilne niskie prędkości, wysoką precyzję kontroli pozycji z efektywnymi materiałami i konstrukcją silnika.
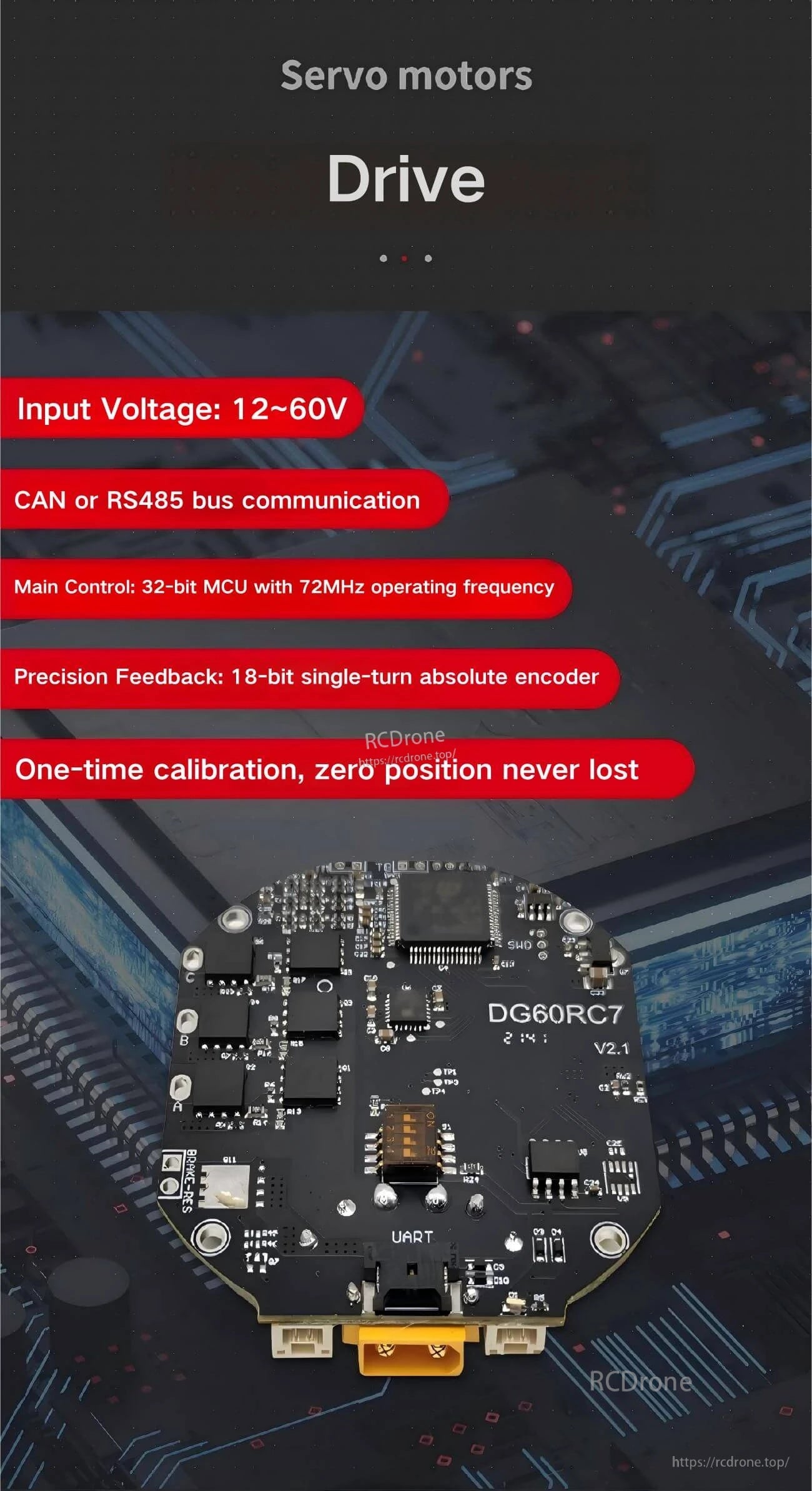
Wybierz komunikację CAN lub RS485 oraz sprzężenie zwrotne z absolutnego enkodera dla responsywnej kontroli prędkości i pozycji.

Jasne oznaczenia interfejsu upraszczają okablowanie dla zasilania, linii CAN/RS485 oraz połączeń sygnałowych UART.
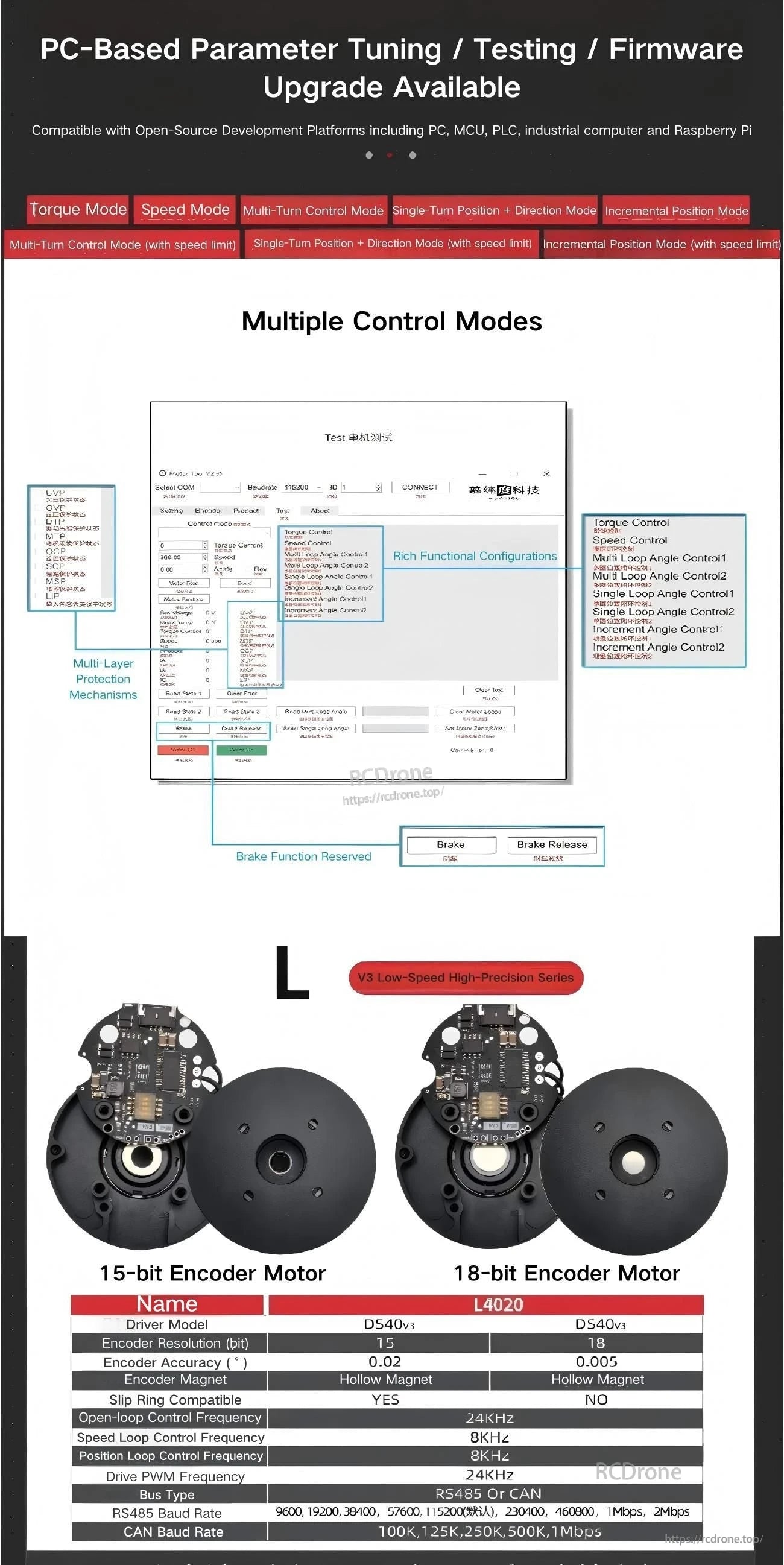
Narzędzia PC umożliwiają dostosowywanie parametrów, testowanie i aktualizacje oprogramowania w różnych trybach sterowania i konfiguracjach enkodera.

Related Collections

