

MUWEIDU L5020 Silnik Mini Serwo 16V 500obr./min 0,18N.m RS485/CAN Enkoder 15-bit/18-bit 99g
MUWEIDU L5020 Silnik Mini Serwo 16V 500obr./min 0,18N.m RS485/CAN Enkoder 15-bit/18-bit 99g
MUWEIDU
Cena regularna
$180.00 USD
Cena regularna
Cena promocyjna
$180.00 USD
Cena jednostkowa
na
Z wliczonymi podatkami.
Koszt wysyłki obliczony przy realizacji zakupu.
Nie można załadować gotowości do odbioru
Przegląd
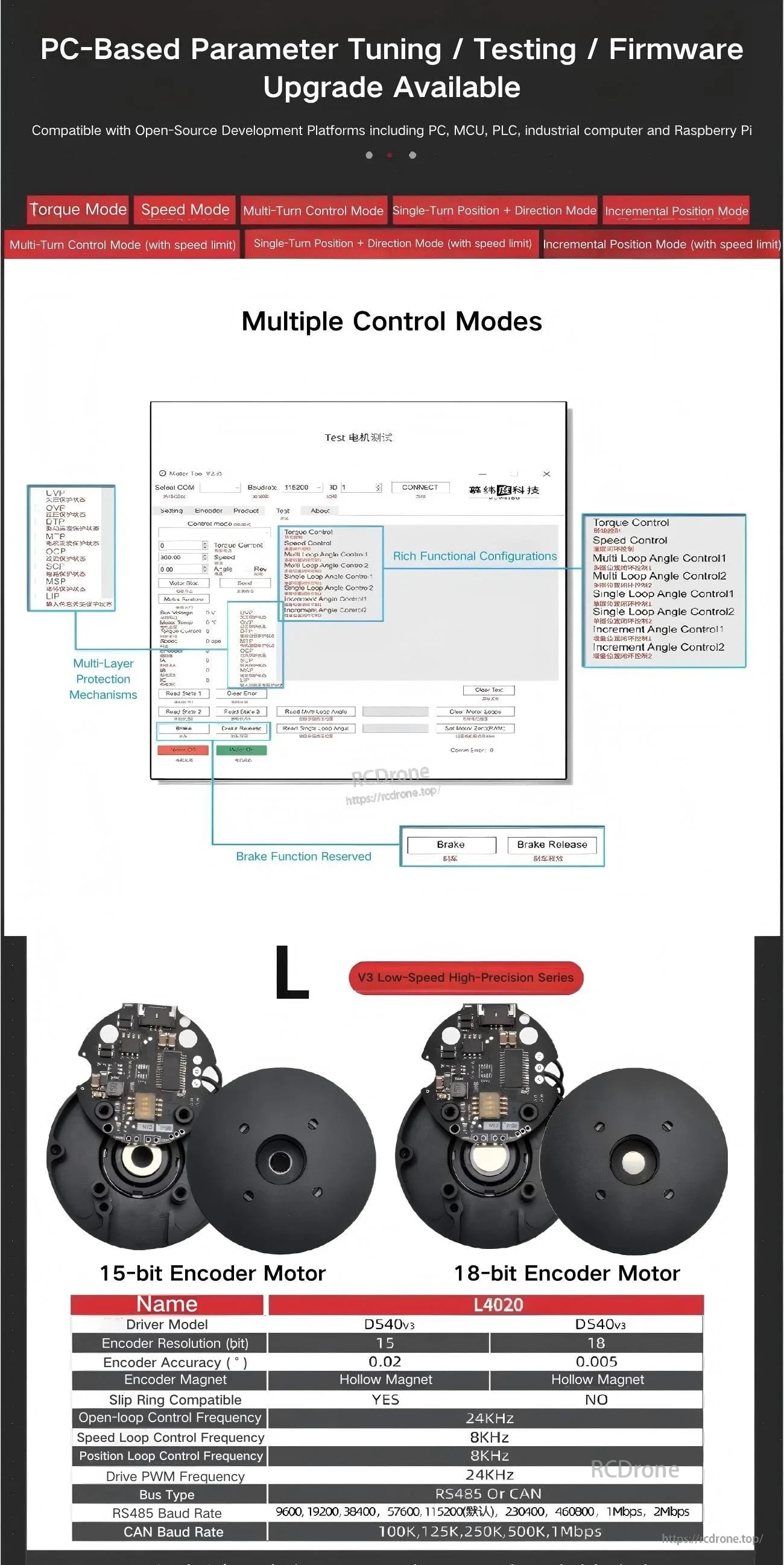
MUWEIDU L5020 Silnik to mini serwomotor zaprojektowany do kontroli pozycji o niskiej prędkości i wysokiej precyzji. Obsługuje tryby kontroli prędkości/pozycji i zapewnia komunikację RS485 lub CAN, z opcjonalnym sprzężeniem zwrotnym enkodera 15-bitowego lub 18-bitowego oraz monitorowaniem temperatury silnika.
Kluczowe cechy
- Seria silników bezszczotkowych DC o niskiej prędkości & wysokiej precyzji
- Mini serwomotory
- Projekt z pustym wałem
- Stabilna & płynna praca
- Certyfikat CE
- Zintegrowana wysoka precyzja
- Lekka konstrukcja; wysoka wydajność momentu obrotowego
- Opracowane zgodnie z ultra wysokimi standardami
- Spełnia wymagania kontroli pozycji o niskiej prędkości i wysokiej precyzji
- Wysokiej jakości blachy stalowe silikonowe i wysokotemperaturowe, odporne na wysoką wydajność magnesy trwałe są stosowane jako materiały rdzeniowe silnika
- Projekt zewnętrznego wirnika w wielostopniowym spłaszczonym kształcie zapewnia wyższy moment obrotowy, idealny do zastosowań w ograniczonej przestrzeni
- Bezszczotkowa struktura w połączeniu z wysokowydajnymi łożyskami zapewnia płynniejszą rotację i dłuższą żywotność
- Wysokoprecyzyjne, niskotemperaturowe oporniki stopowe realizują dokładne próbkowanie i kontrolę prądu
- Pełny napęd mostka pełno-bridge N-channel trzech faz charakteryzuje się niskim oporem wewnętrznym i wysokim wyjściem prądowym
- Wsparcie dla płynnego przełączania między trybami otwartej pętli momentu, prędkości i kontroli pozycji
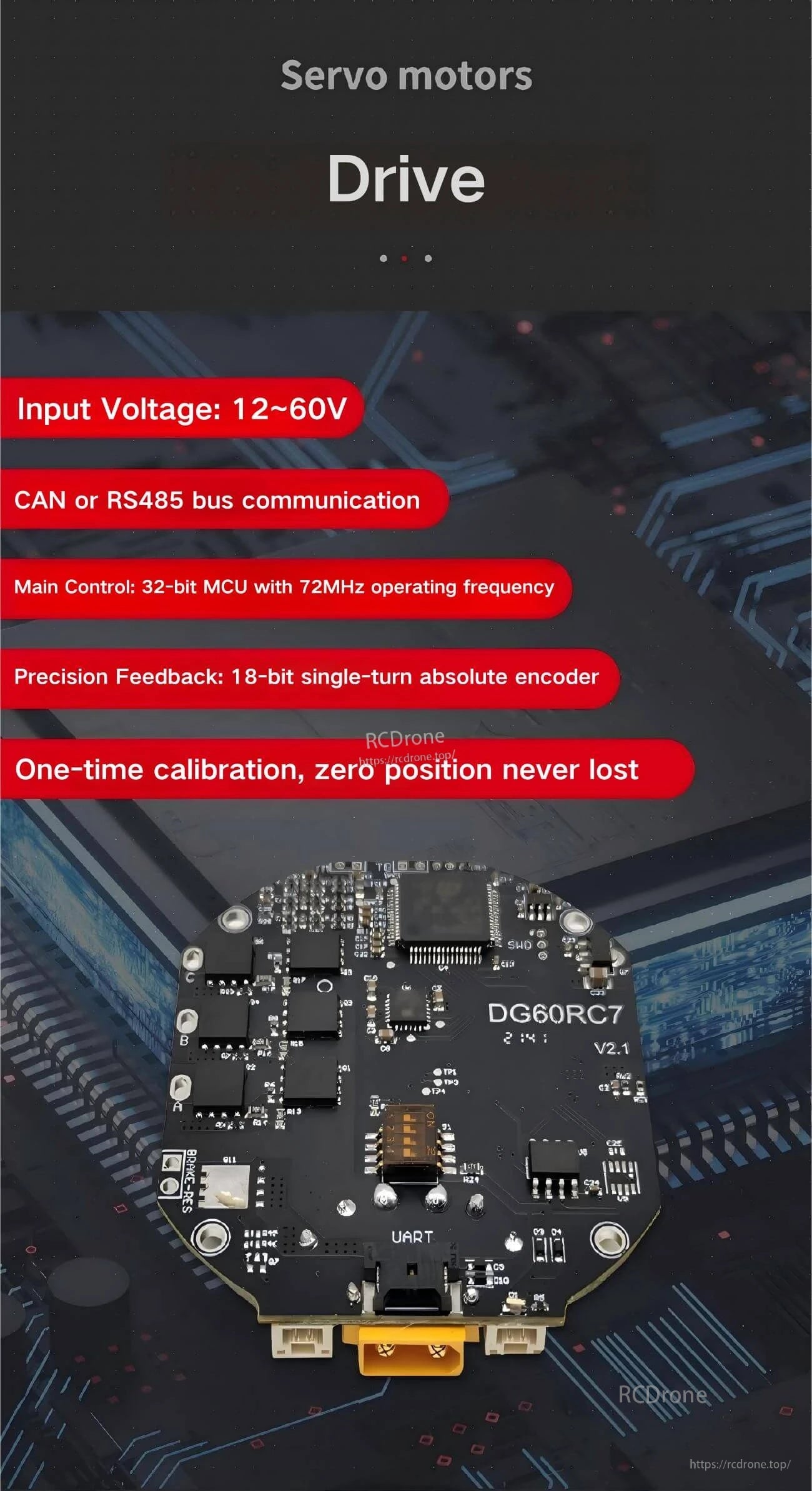
- Wyróżniki napędu: Napięcie wejściowe 12~60V; komunikacja przez magistralę CAN lub RS485; Główna kontrola: 32-bitowy MCU z częstotliwością roboczą 72MHz; Precyzyjna informacja zwrotna: 18-bitowy enkoder absolutny jednego obrotu; Kalibracja jednorazowa, pozycja zerowa nigdy nie jest tracona
Scenariusze zastosowania
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
Specyfikacje
| Model | L5020 |
| Napięcie znamionowe | 16V |
| Prąd znamionowy | 0.8A |
| Moc szczytowa | 6.7W |
| Moment nominalny | 0.18N.m |
| Moment szczytowy | 0.28N.m |
| Prędkość nominalna | 500rpm |
| Enkoder | 15bit lub 18bit |
| Bezładność wirnika | 136gcm^2 |
| Monitorowanie temperatury silnika | TAK |
| Tryby sterowania | Prędkość/Pozycja |
| Protokół komunikacyjny | RS485 lub CAN |
| Wymiary całkowite | Φ49mm×23.9mm |
| Waga | 99g |
Interfejsy
- WYŁĄCZNIK ID
- CAN/RS485
| B/L | RS485-B lub CAN-L |
| A/H | RS485-A lub CAN-H |
| V- | Ujemne zasilanie |
| V- | Ujemne zasilanie |
| V+ | Dodatnie zasilanie |
| V+ | Dodatnie zasilanie |
| T | Nadajnik UART |
| R | Odbiornik UART |
| G | GND sygnałowe |
W celu uzyskania wsparcia przed sprzedażą i integracją, skontaktuj się z https://rcdrone.top/ lub wyślij e-mail na [email protected].
Instrukcje
Szczegóły




Related Collections

