

MUWEIDU L5028 Silnik Mini Serwo 16V 150obr./min 0,25N.m RS485/CAN Enkoder 15-bit/18-bit
MUWEIDU L5028 Silnik Mini Serwo 16V 150obr./min 0,25N.m RS485/CAN Enkoder 15-bit/18-bit
MUWEIDU
Nie można załadować gotowości do odbioru
Przegląd
MUWEIDU L5028 Silnik to mini serwomotor zaprojektowany do kontroli ruchu o niskiej prędkości i wysokiej precyzji. Obsługuje kontrolę prędkości/pozycji i oferuje opcje komunikacji RS485 lub CAN, z wyborami enkodera 15-bitowego lub 18-bitowego do sprzężenia zwrotnego.
Kluczowe cechy
- Seria silników bezszczotkowych prądu stałego o niskiej prędkości & wysokiej precyzji (silniki serwo)
- Projekt z pustym wałem
- Stabilna & płynna praca
- Certyfikat CE
- Zintegrowana wysoka precyzja
- Lekka konstrukcja, wysoka wydajność momentu obrotowego
- Spełnia wymagania kontroli pozycji o niskiej prędkości i wysokiej precyzji
- Wysokiej jakości blachy stalowe silikonowe i odporne na wysoką temperaturę magnesy trwałe są stosowane jako materiały rdzeniowe silnika
- Projekt zewnętrznego wirnika o wielostopniowym spłaszczonym kształcie zapewnia wyższy moment obrotowy, idealny do zastosowań w ograniczonej przestrzeni
- Bezszczotkowa struktura w połączeniu z wysokowydajnymi łożyskami zapewnia płynniejszą rotację i dłuższą żywotność
- Wysokoprecyzyjne, niskotemperaturowe oporniki stopowe realizują dokładne próbkowanie i kontrolę prądu
- Pełny napęd mostka pełno-bridge N-kanalowego trójfazowego charakteryzuje się niskim oporem wewnętrznym i wysokim wyjściem prądowym
- Obsługuje płynne przełączanie między trybami otwartej pętli momentu, prędkości i kontroli pozycji
- Dostępne strojenie parametrów / testowanie / aktualizacja oprogramowania na komputerze PC
- Kompatybilny z platformami rozwoju open-source, w tym PC, MCU, PLC, komputerami przemysłowymi i Raspberry Pi
- Napięcie wejściowe: 12~60V
- Komunikacja przez magistralę CAN lub RS485
- Główna kontrola: 32-bitowy MCU z częstotliwością pracy 72MHz
- Precyzyjna informacja zwrotna: 18-bitowy enkoder absolutny jednego obrotu
- Kalibracja jednorazowa, pozycja zerowa nigdy nie jest tracona
- Wielokrotne tryby kontroli: Tryb momentu; Tryb prędkości; Tryb kontroli wieloobrotowej; Tryb pozycji jednego obrotu + kierunek; Tryb pozycji inkrementalnej
- Tryby sterowania (z ograniczeniem prędkości): Tryb wielokrotnego obrotu (z ograniczeniem prędkości); Tryb pojedynczego obrotu + kierunek (z ograniczeniem prędkości); Tryb pozycji inkrementalnej (z ograniczeniem prędkości)
Specyfikacje
| Model | L5028 |
| Napięcie znamionowe | 16V |
| Prąd znamionowy | 0.82A |
| Moc szczytowa | 4.7W |
| Moment nominalny | 0.25 N.m |
| Moment szczytowy | 0.37 N.m |
| Prędkość nominalna | 150 rpm |
| Enkoder | 15-bit lub 18-bit |
| Bezładność wirnika | 192 gcm^2 |
| Monitorowanie temperatury silnika | Tak |
| Tryby sterowania | Prędkość/Pozycja |
| Protokół komunikacyjny | RS485 lub CAN |
| Wymiary całkowite | Phi49 mm x 28.9 mm |
| Waga | 135 g |
Definicja interfejsu (CAN/RS485)
| Interfejs | Uwaga |
|---|---|
| B/L | RS485-B lub CAN-L |
| A/H | RS485-A lub CAN-H |
| V- | Ujemne zasilanie |
| V- | Ujemne zasilanie |
| V+ | Dodatnie zasilanie |
| V+ | Dodatnie zasilanie |
| T | Transmiter UART |
| R | Odbiornik UART |
| G | GND sygnałowy |
Aplikacje
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
- Kamera 360°
- Kamera ręczna
- LiDAR
- Gimbal
Aby uzyskać pomoc w wyborze przed sprzedażą, potwierdzenie okablowania lub wsparcie dokumentacyjne, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/.
Podręczniki / Dokumenty
Szczegóły

MUWEIDU L5028 to kompaktowy, niskoprędkościowy mini serwomotor o formacie z pustym wałem, idealny do budów o ograniczonej przestrzeni.

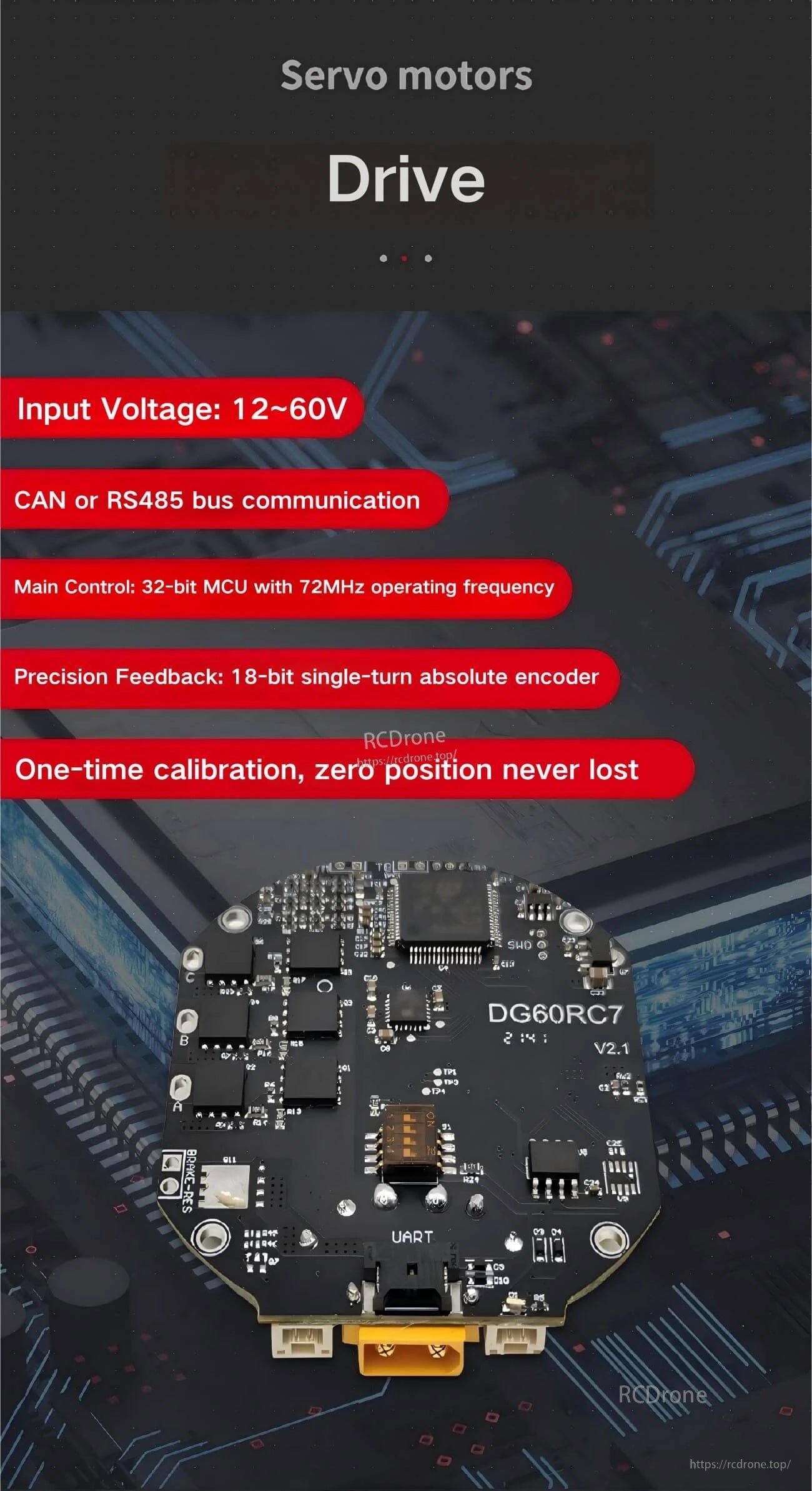
Zintegrowana elektronika napędowa obsługuje szeroki zakres wejściowy oraz komunikację CAN lub RS485 dla precyzyjnej kontroli ruchu.

Jasne oznaczenia interfejsu ułatwiają podłączenie sygnałów CAN/RS485, zasilania oraz pinów UART podczas integracji.
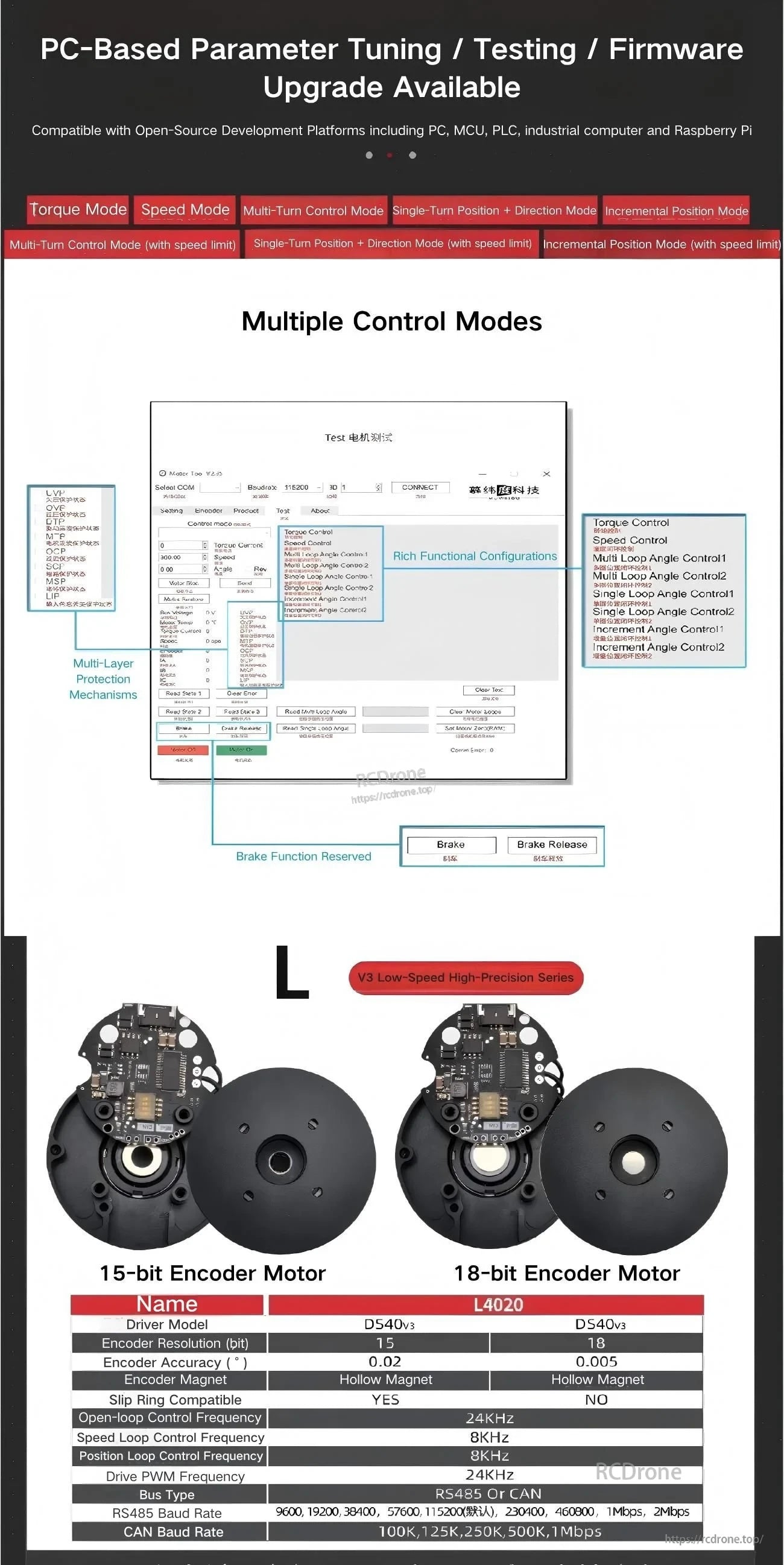
Parametryzacja na komputerze oraz wiele trybów sterowania ułatwiają dopasowanie sprzężenia zwrotnego z enkodera 15-bitowego lub 18-bitowego do zadania.
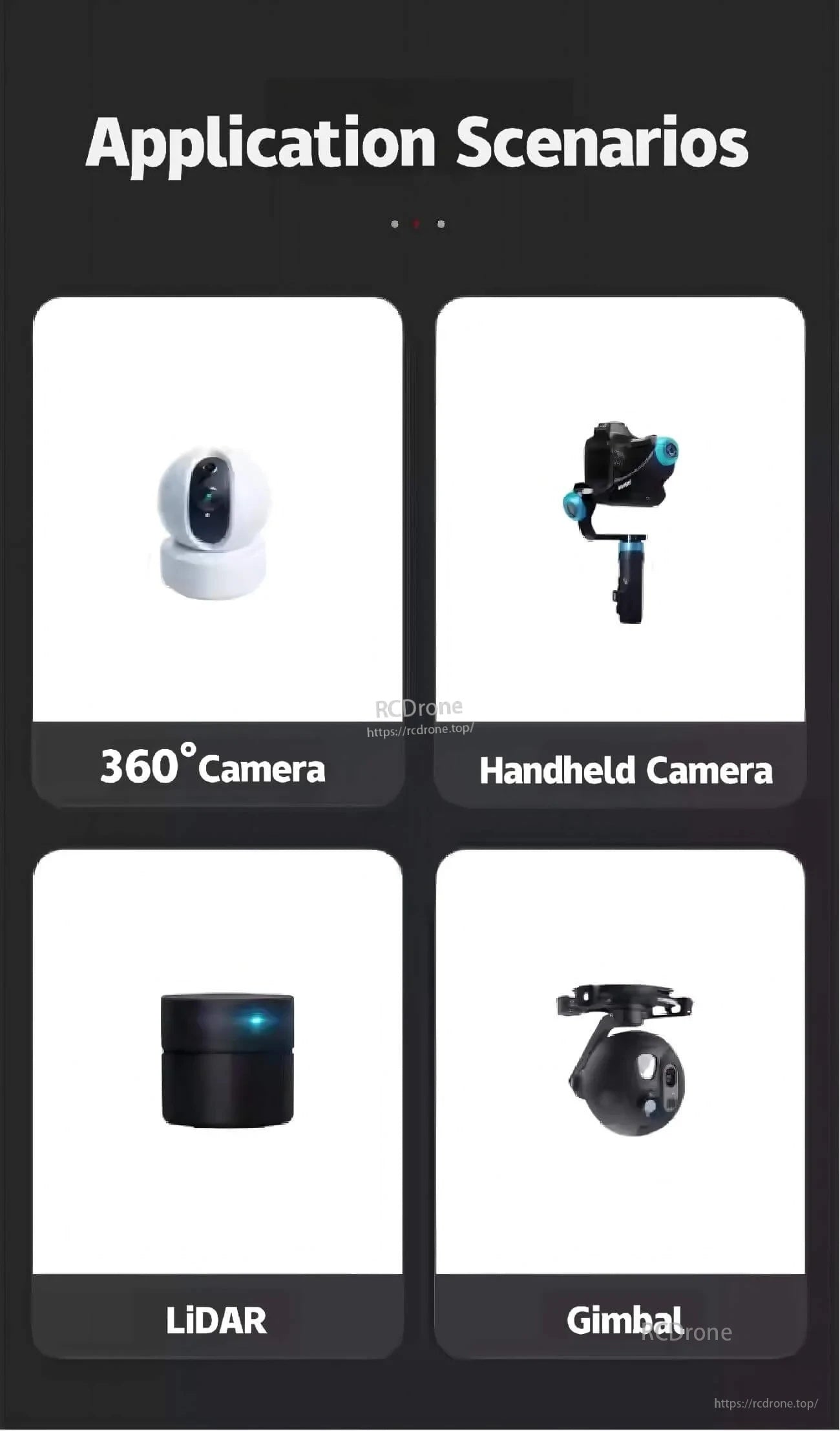
Doskonale nadaje się do kompaktowej robotyki i projektów stabilizacji, takich jak systemy kamer, zespoły LiDAR i gimbale.
Related Collections

