

MUWEIDU L9030 Silnik bezszczotkowy DC Servo 24V 160obr./min 1N.m RS485/CAN Enkoder 15/18bit
MUWEIDU L9030 Silnik bezszczotkowy DC Servo 24V 160obr./min 1N.m RS485/CAN Enkoder 15/18bit
MUWEIDU
Nie można załadować gotowości do odbioru
Przegląd
MUWEIDU Silnik L9030 to silnik serwo bezszczotkowy o niskiej prędkości i wysokiej precyzji, zaprojektowany do kontroli pozycji i prędkości w projektach robotyki i automatyzacji. Do najważniejszych cech serii należą konstrukcja z pustym wałem, stabilne & płynne działanie oraz oznaczenie certyfikatem CE. W celu uzyskania pomocy w integracji, dostępu do dokumentacji lub pytań przed sprzedażą, skontaktuj się [email protected] or odwiedź https://rcdrone.top/.
Kluczowe cechy
- Pozycjonowanie serii: „Seria silników bezszczotkowych DC o niskiej prędkości i wysokiej precyzji” / „Mini serwomotory”
- Projekt z pustym wałem
- Stabilna & płynna praca
- Certyfikat CE (tekst etykiety)
- Zintegrowana wysoka precyzja; lekka konstrukcja; wysoka wydajność momentu obrotowego (tekst etykiety)
- Opracowane zgodnie z ultra wysokimi standardami (tekst etykiety)
- Charakterystyka silnika zintegrowanego systemu napędu elektrycznego (tekst etykiety)
- Spełnia wymagania kontroli pozycji o niskiej prędkości i wysokiej precyzji (tekst etykiety)
- Materiały rdzeniowe (tekst etykiety): premium blachy stalowe silikonowe i wysokotemperaturowe, odporne na wysoką wydajność magnesy trwałe
- Projekt zewnętrznego wirnika o wieloetapowym spłaszczonym kształcie zapewnia wyższy moment obrotowy, idealny do zastosowań w ograniczonej przestrzeni (tekst etykiety)
- Bezszczotkowa konstrukcja połączona z wysokowydajnymi łożyskami dla płynniejszej rotacji i dłuższej żywotności (label text)
- Wysokoprecyzyjne, niskotemperaturowe oporniki stopowe do dokładnego próbkowania i kontroli prądu (label text)
- Pełny napęd mostka trójfazowego N-channel charakteryzuje się niskim oporem wewnętrznym i wysokim wyjściem prądowym (label text)
- Obsługuje bezproblemowe przełączanie między trybami kontroli momentu obrotowego w otwartej pętli, prędkości i pozycji (label text)
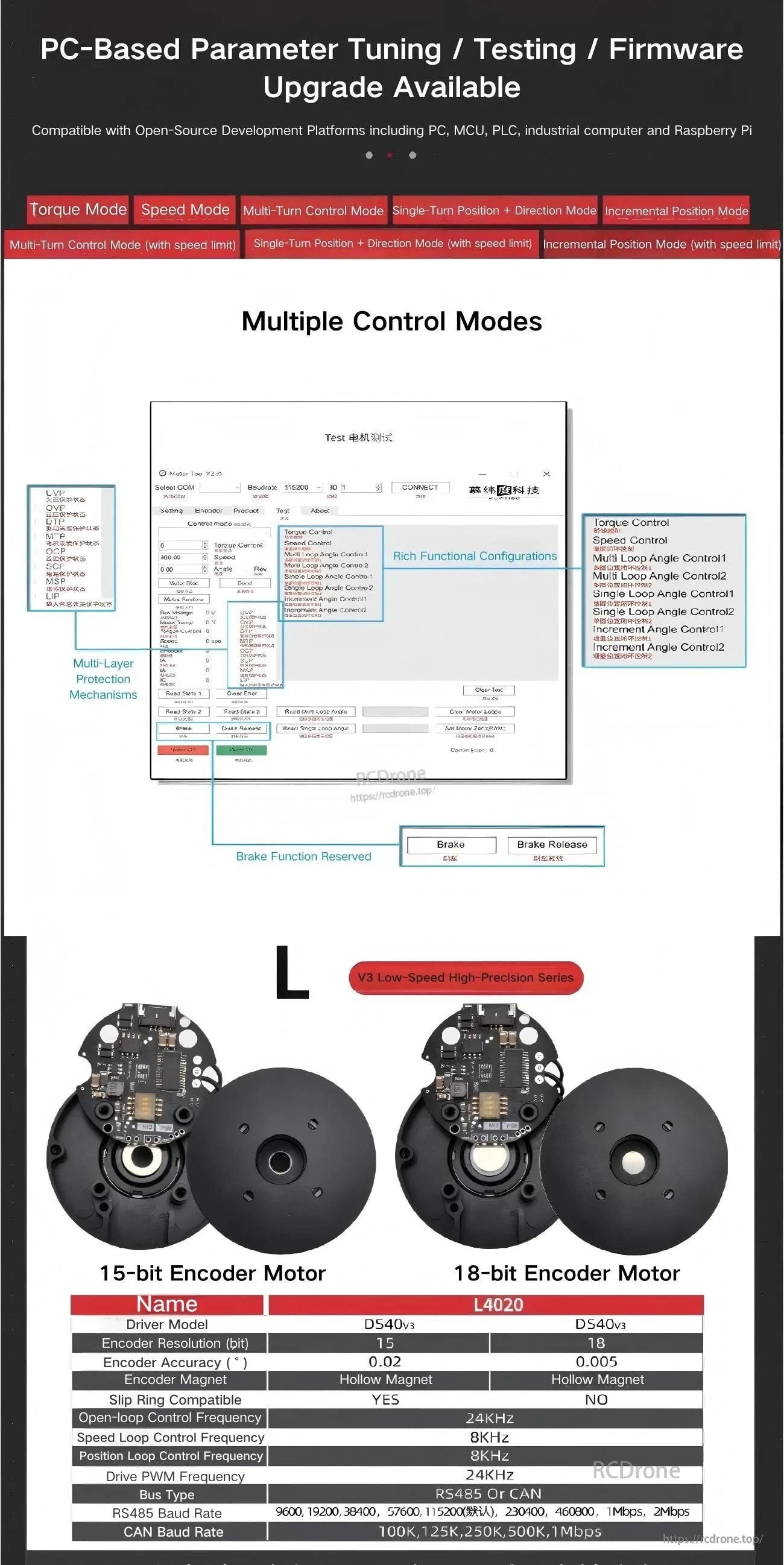
- Możliwość strojenia parametrów / testowania / aktualizacji oprogramowania na komputerze PC (label text)
- Kompatybilny z platformami rozwoju open-source, w tym PC, MCU, PLC, komputerami przemysłowymi i Raspberry Pi (label text)
Scenariusze zastosowania
- Roboty humanoidalne
- Ramiona robotyczne
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
Specyfikacje
| Model | L9030 |
| Napięcie znamionowe | 24V |
| Prąd znamionowy | 1.85A |
| Moc szczytowa | 1.8W |
| Moment obrotowy nominalny | 1N.m |
| Moment obrotowy szczytowy | 2.2N.m |
| Ocena prędkości | 160rpm |
| Enkoder | 15bit lub 18bit |
| Bezładność wirnika | 2860gcm^2 |
| Monitorowanie temperatury silnika | TAK |
| Tryby sterowania | Prędkość/Pozycja |
| Protokół komunikacyjny | RS485 lub CAN |
| Wymiary całkowite | Phi89mm x 37mm |
| Waga | 510g |
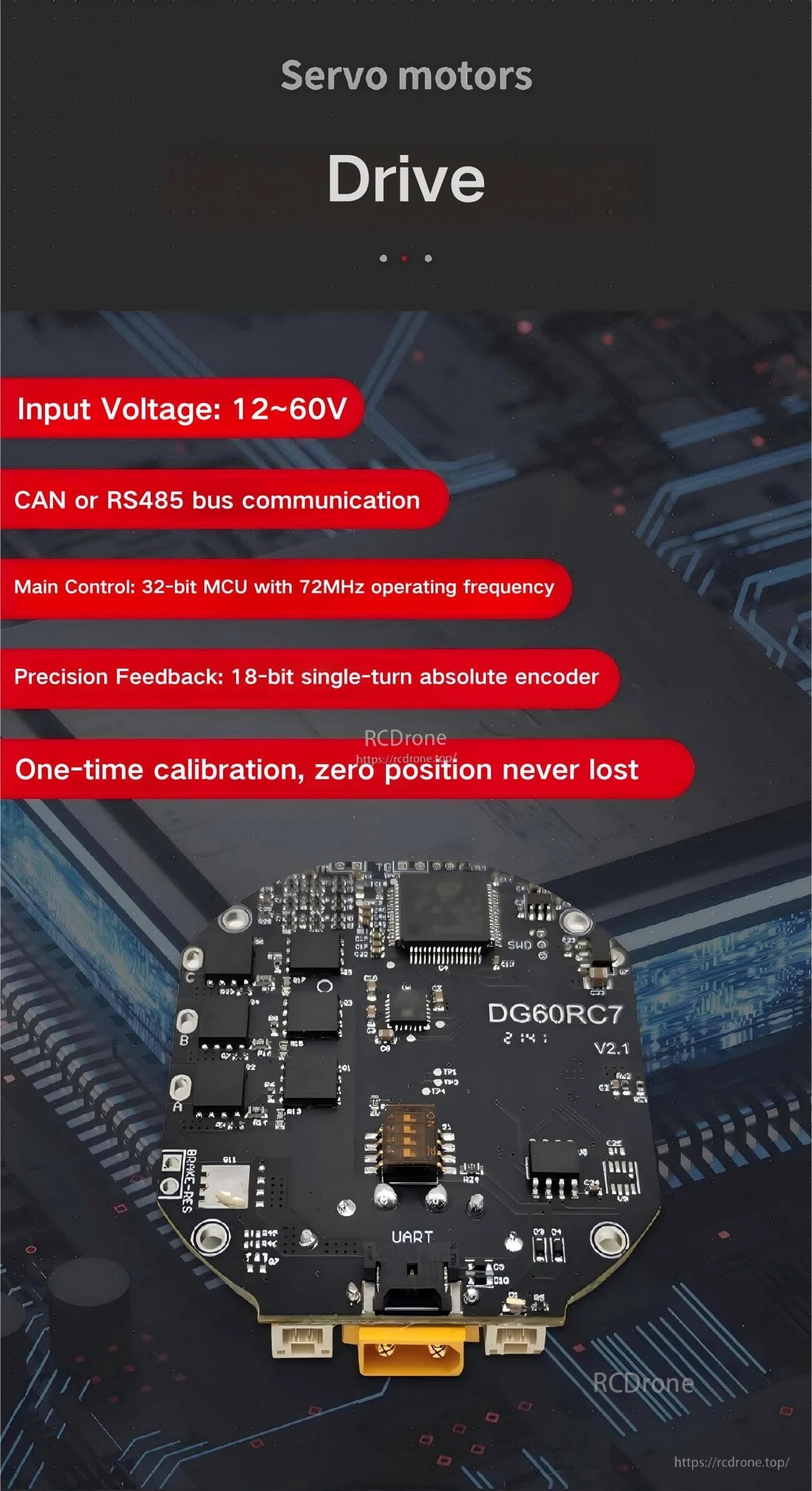
Napęd / Sterowanie (Tekst etykiety z obrazów)
- Napięcie wejściowe: 12~60V
- Komunikacja przez magistralę CAN lub RS485
- Główne sterowanie: 32-bitowy MCU z częstotliwością roboczą 72MHz
- Precyzyjna informacja zwrotna: 18-bitowy enkoder absolutny jednorotacyjny
- Jednorazowa kalibracja, pozycja zerowa nigdy nie jest tracona
Definicja interfejsu (Tekst etykiety z obrazów)
| B/L | RS485-B lub CAN-L |
| A/H | RS485-A lub CAN-H |
| V- | Ujemne zasilanie |
| V- | Ujemne zasilanie |
| V+ | Dodatnie zasilanie |
| V+ | Dodatnie zasilanie |
| T | Nadawca UART |
| R | Odbiornik UART |
| G | GND sygnałowe |
Inne etykiety interfejsu pokazane: ID SWITCH; CAN/RS485.
Tryby kontroli (Tekst etykiety z obrazów)
- Tryb momentu
- Tryb prędkości
- Tryb kontroli wieloobrotowej
- Tryb pozycji + kierunku jednego obrotu
- Tryb pozycji inkrementalnej
- Tryb kontroli wieloobrotowej (z ograniczeniem prędkości)
- Tryb pozycji + kierunku jednego obrotu (z ograniczeniem prędkości)
- Tryb pozycji inkrementalnej (z ograniczeniem prędkości)
Podręczniki / Dokumenty
Szczegóły

Zbudowany z myślą o kompaktowej robotyce i stawach automatyzacyjnych, seria L9030 koncentruje się na kontroli o niskiej prędkości i wysokiej precyzji z formą wału pustego.

Premium materiały rdzeniowe, struktura zewnętrznego wirnika i gładkie łożyska wspierają stabilną pracę, podczas gdy wiele trybów kontroli obejmuje moment, prędkość i pozycję.
Wsparcie dla szerokiego zakresu napięcia wejściowego oraz łączność CAN/RS485 ułatwiają integrację z PC, MCU, PLC lub kontrolerami przemysłowymi.

Rozkład pinów złącza i etykietowanie przełącznika ID sprawiają, że okablowanie magistrali i adresowanie urządzeń są jaśniejsze podczas instalacji.
Narzędzia PC wspierają dostosowywanie parametrów, testowanie i aktualizacje oprogramowania, z opcjami enkodera dostępnymi dla różnych potrzeb pozycjonowania.

Related Collections

