

MUWEIDU L9050 Silnik 24V 20obr./min Silnik BLDC Servo 2,5N.m RS485/CAN Enkoder 15/18-bitowy 945g
MUWEIDU L9050 Silnik 24V 20obr./min Silnik BLDC Servo 2,5N.m RS485/CAN Enkoder 15/18-bitowy 945g
MUWEIDU
Nie można załadować gotowości do odbioru
Przegląd
MUWEIDU L9050 Silnik to silnik serwo bezszczotkowy o niskiej prędkości i wysokiej precyzji, zaprojektowany do kontroli prędkości/pozycji za pomocą komunikacji RS485 lub CAN. Obsługuje strojenie/testowanie parametrów oparte na komputerze oraz aktualizację oprogramowania, i jest przeznaczony do zintegrowanych aplikacji napędu elektrycznego wymagających dokładnego pozycjonowania przy niskich prędkościach.
Kluczowe cechy
- Seria silników bezszczotkowych DC o niskiej prędkości & wysokiej precyzji
- Projekt z pustym wałem
- Stabilna & płynna praca
- Certyfikat CE
- Zintegrowana wysoka precyzja
- Lekka konstrukcja, wysoka wydajność momentu obrotowego
- Spełnia wymagania kontroli pozycji o niskiej prędkości i wysokiej precyzji
- Wysokowydajny 32-bitowy MCU (seria MS kompatybilna ze wszystkimi poleceniami kontrolnymi serii MF)
- Premium blachy stalowe silikonowe i wysokotemperaturowe, odporne na wysoką wydajność magnesy trwałe używane jako podstawowe materiały silnika
- Zewnętrzny wirnik o wielostopniowym spłaszczonym designie dla wyższego momentu obrotowego w aplikacjach o ograniczonej przestrzeni
- Bezszczotkowa struktura z wysokowydajnymi łożyskami dla płynniejszej rotacji i dłuższej żywotności
- Wysokoprecyzyjne, niskotemperaturowe oporniki stopowe dla dokładnego próbkowania prądu i kontroli
- Pełny napęd mostka pełnofazowego N-channel z niskim oporem wewnętrznym i wysokim wyjściem prądowym
- Obsługuje płynne przełączanie między trybami otwartej pętli momentu, prędkości i kontroli pozycji
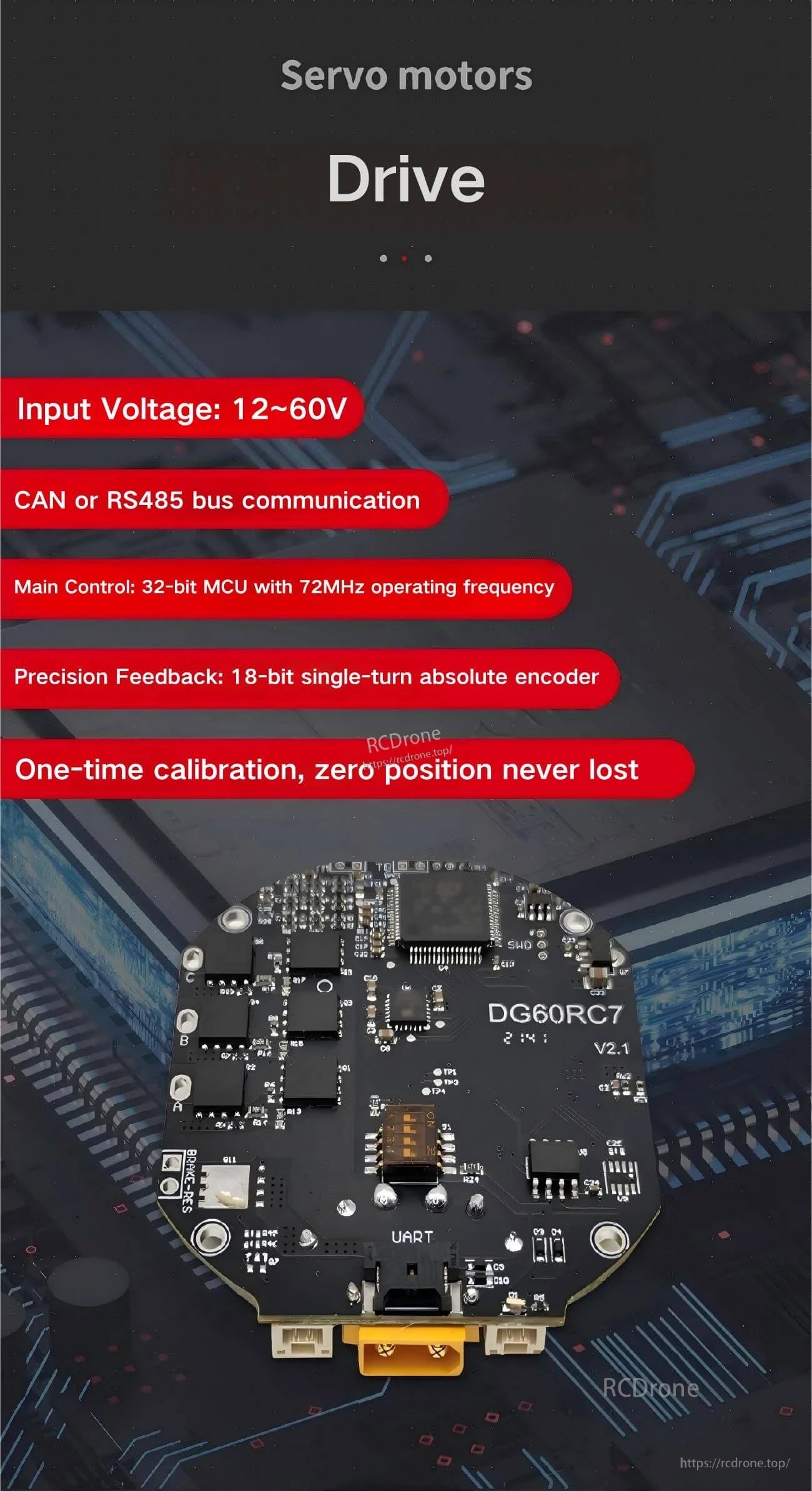
- Napięcie wejściowe (napęd): 12~60V
- Główna kontrola (napęd): 32-bitowy MCU z częstotliwością roboczą 72MHz
- Precyzyjna informacja zwrotna (napęd): 18-bitowy enkoder absolutny jednego obrotu
- Jednorazowa kalibracja, pozycja zerowa nigdy nie jest tracona
Specyfikacje
| Model | L9050 |
| Napięcie znamionowe | 24V |
| Prąd znamionowy | 1.78A |
| Moc szczytowa | 10W |
| Moment obrotowy nominalny | 2.5N.m |
| Moment obrotowy szczytowy | 3.4N.m |
| Ocena prędkości | 20rpm |
| Enkoder | 15bit lub 18bit |
| Bezładność wirnika | 4656gcm^2 |
| Monitorowanie temperatury silnika | TAK |
| Tryby sterowania | Prędkość/Pozycja |
| Protokół komunikacyjny | RS485 lub CAN |
| Wymiary całkowite | Phi89mm x 53mm |
| Waga | 945g |
Definicja interfejsu
| PRZEŁĄCZNIK ID | Obsługiwane |
| CAN/RS485 | Obsługiwane |
| B/L | RS485-B lub CAN-L |
| A/H | RS485-A lub CAN-H |
| V- | Ujemne zasilanie |
| V- | Zasilanie ujemne |
| V+ | Zasilanie dodatnie |
| V+ | Zasilanie dodatnie |
| T | Transmiter UART |
| R | Odbiornik UART |
| G | GND sygnałowe |
Scenariusze aplikacji
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
- Kamera 360°
- Kamera ręczna
- LiDAR
- Gimbal
Podręczniki
W celu uzyskania wskazówek dotyczących okablowania, wsparcia w integracji lub pomocy w dostępie do dokumentów, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/ .
Szczegóły

Zaprojektowany do precyzyjnego pozycjonowania przy niskich prędkościach, seria L9050 łączy konstrukcję z pustym wałem z stabilnym, płynnym obrotem.

Podstawowe materiały i projekt napędu koncentrują się na gęstości momentu obrotowego, długiej żywotności oraz niezawodnej kontroli wysokiej precyzji przy niskich prędkościach.
Komunikacja przez magistralę CAN/RS485 oraz sprzężenie zwrotne z enkodera absolutnego wspierają kontrolę prędkości i pozycji z konfiguracją opartą na PC.

Szybki przewodnik dotyczący przełącznika ID oraz przypisania pinów CAN/RS485, zasilania i UART podczas okablowania i integracji.
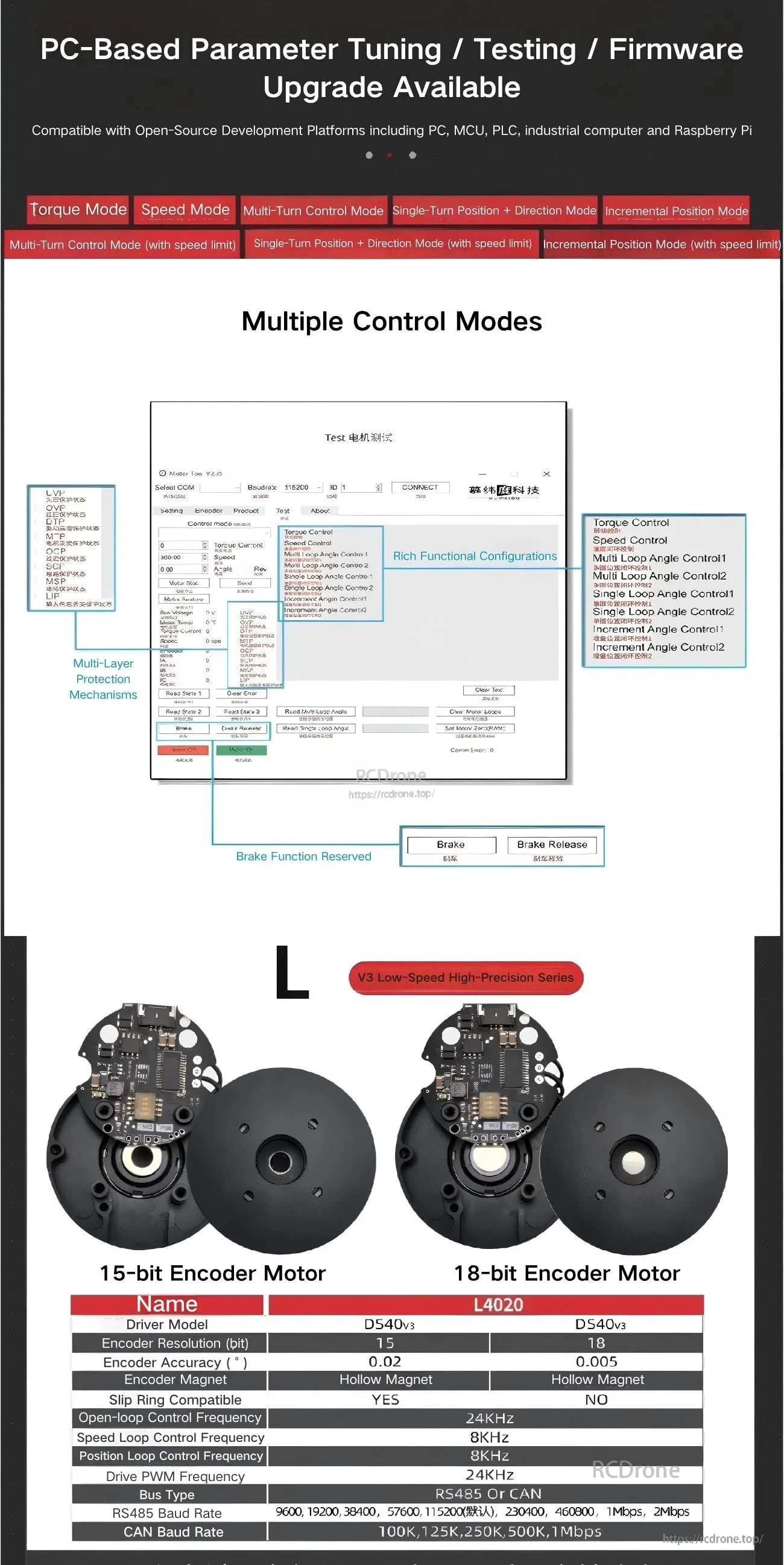
Strojenie parametrów, testowanie i aktualizacje oprogramowania układowego można przeprowadzać na komputerze, z dostępnymi wieloma trybami kontrolnymi i opcjami enkodera.

Related Collections

