







MyActuator RH-17 Wydrążony Harmoniczny Silnik Przegubowy – 54N·m momentu szczytowego, przełożenie 100:1, EtherCAT i CAN BUS, podwójny enkoder ABS-17BIT
MyActuator RH-17 Wydrążony Harmoniczny Silnik Przegubowy – 54N·m momentu szczytowego, przełożenie 100:1, EtherCAT i CAN BUS, podwójny enkoder ABS-17BIT
MyActuator
Nie można załadować gotowości do odbioru
Przegląd
Silnik MyActuator RH-17 Hollow Harmonic Robot Joint Motor to wysokowydajny aktuator zaprojektowany do zaawansowanych zastosowań robotycznych. Dzięki przekładni 100:1, szczytowemu momentowi obrotowemu 54 N·m oraz nominalnemu momentowi obrotowemu 35 N·m, zapewnia precyzyjną, stabilną i mocną pracę. Wyposażony w komunikację EtherCAT i CAN BUS, system podwójnego enkodera ABS-17BIT oraz łożyska krzyżowe, ten silnik oferuje wyjątkową dokładność kontroli i trwałość. Jego kompaktowa konstrukcja z otworem (Ø80 mm × 90.2 mm) oraz waga 1.11 kg czynią go idealnym rozwiązaniem dla ramion robotycznych, robotów współpracujących oraz systemów automatyzacji wymagających wysokiej gęstości momentu obrotowego i precyzyjnej kontroli ruchu.
Kluczowe cechy
-
Wysoki moment obrotowy i moc: Nominalny moment obrotowy 35 N·m oraz szczytowy moment obrotowy 54 N·m dla wymagających zastosowań.
-
Podwójna komunikacja: Obsługuje protokoły EtherCAT i CAN BUS dla bezproblemowej integracji i szybkiej reakcji.
-
Precyzyjna kontrola: Podwójne enkodery ABS-17BIT dla wejścia i wyjścia zapewniają precyzyjne pozycjonowanie z <0.01° powtarzalnością.
-
Kompaktowy i lekki: Konstrukcja z pustym wałem o wadze zaledwie 1.11 kg, zoptymalizowana pod kątem wysokiej gęstości momentu obrotowego.
-
Solidna konstrukcja: Wyposażony w łożyska krzyżowe dla zwiększonej nośności i trwałości.
-
Przemysłowa niezawodność: Klasa izolacji F, szybki MCU i zoptymalizowane odprowadzanie ciepła dla stabilnej wydajności w długim okresie.
Parametry produktu
| Parametr | Wartość |
|---|---|
| Przełożenie | 100:1 |
| Napięcie wejściowe | 48 V |
| Obroty na luzie | 30 RPM |
| Prąd na luzie | 0.6 A |
| Obroty znamionowe | 25 RPM |
| Moment obrotowy znamionowy | 35 N·m |
| Moc znamionowa | 91 W |
| Prąd znamionowy | 4.7 A (rms) |
| Moment obrotowy szczytowy | 54 N·m |
| Prąd szczytowy | 7.4 A (rms) |
| Stała Back-EMF | 19.2 Vdc/Krpm |
| Stała momentu modułu | 7.4 N·m/A |
| Opór fazy silnika | 0.70 Ω |
| Indukcyjność fazy silnika | 0.47 mH |
| Pary biegunowe | 10 |
| Luźność | <40 Arcsec |
| Obciążenie promieniowe | Statyczne: 16.3 kN / Dynamiczne: 10.4 kN |
| Obciążenie osiowe | Statyczne: 78.2 kN / Dynamiczne: 20.8 kN |
| Bezładność | N: 0.52 kg·m² / B: 0.56 kg·m² |
| Dokładność powtarzalności pozycji | <0.01° |
| Komunikacja | CAN BUS & EtherCAT |
| Waga | Netto: 1,11 kg / W opakowaniu: 1,28 kg |
| Klasa izolacji | F |
Typ enkodera
-
Enkoder wejściowy: ABS-17BIT
-
Enkoder wyjściowy: ABS-17BIT
-
Dostarcza precyzyjnych informacji zwrotnych o ruchu dla zwiększonej dokładności kontroli.
Instalacja & Wymiary
-
Rozmiar: Ø80 mm × 90,2 mm
-
Montaż: Wiele otworów przelotowych i gwintowanych interfejsów dla bezpiecznej instalacji.
-
Otwarta oś: Optymalizowana do prowadzenia kabli w ramionach robotycznych i systemach automatyzacji.
Interfejs i okablowanie
-
Porty EtherCAT: terminale IN i OUT do łańcuchowania sieci.
-
Porty CAN BUS: CAN_H i CAN_L do komunikacji.
-
Terminale zasilania: złącza XT30 dla niezawodnego dostarczania energii.
-
Połączenia pomocnicze: interfejsy baterii pamięci i rezystora upustowego dla zaawansowanych konfiguracji sterowania.
Zawartość opakowania
-
Siłownik: MyActuator Silnik harmoniczny RH-17 z pustym rdzeniem ×1
-
A. Kabel zasilający ×2
-
B. Kabel komunikacyjny CAN BUS ×4
-
C. 120Ω Opór terminala ×1
-
D. Kabel komunikacyjny EtherCAT ×2
-
E. Moduł komunikacyjny CAN BUS ×1 (Bezprzewodowy adapter USB-CAN w zestawie z zamówieniem)
Zastosowania
-
Współpracujące ramiona robotyczne
-
Systemy automatyzacji przemysłowej
-
Roboty humanoidalne i czworonogie
-
Platformy precyzyjnego ruchu
-
Autonomiczne stawy robotyczne do badań i rozwoju
Szczegóły

Silnik robota RH-17 oferuje podwójny enkoder, CAN BUS & EtherCAT, przełożenie 100:1, 48V, 35 N.m momentu obrotowego, 91W mocy. Dostępny z/bez hamulca. Zawiera rysunki i parametry.
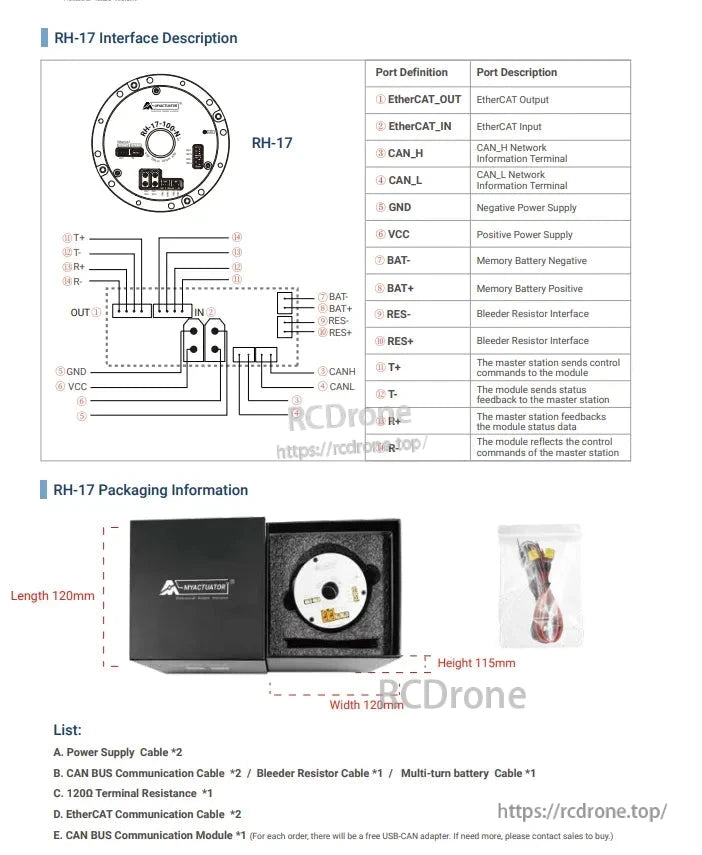
Interfejs RH-17 obejmuje połączenia EtherCAT, CAN bus, zasilania i baterii. Opakowanie zawiera kable, rezystory i moduł. Wymiary: 120×120×115mm. Lista zawiera kable zasilające, CAN, EtherCAT, rezystancję i moduł komunikacyjny.
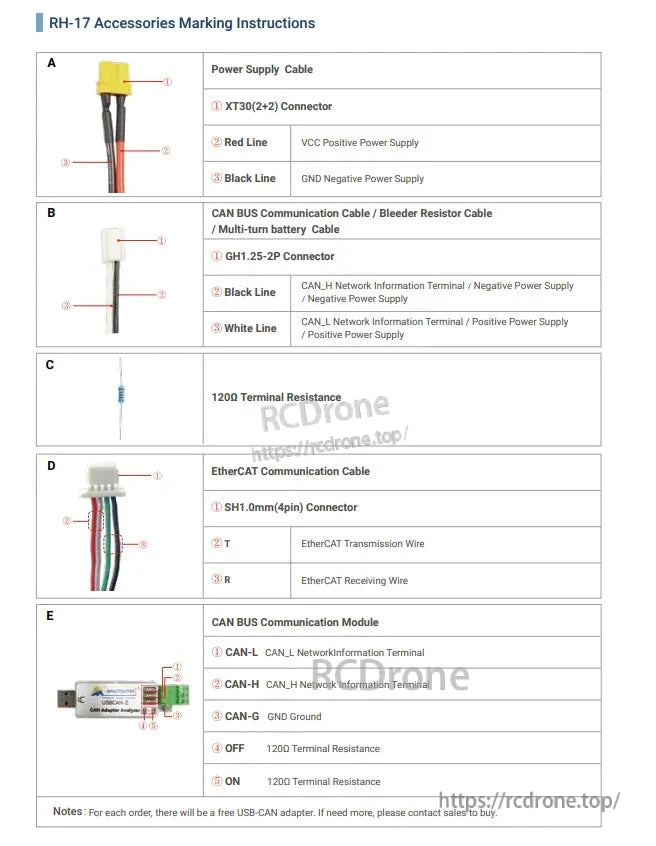
Akcesoria RH-17 obejmują kable zasilające, CAN BUS, EtherCAT, rezystancję 120Ω oraz moduł komunikacyjny. Szczegóły obejmują złącza, kolory przewodów, funkcje i rezystancje końcowe dla każdego komponentu. Adapter USB-CAN dołączony do zamówienia.
Related Collections







