





MyActuator RH-20 Harmoniczny silnik przegubu robota, przełożenie 100:1, moment szczytowy 80N·m, EtherCAT i CAN Bus, podwójny enkoder 17-bitowy
MyActuator RH-20 Harmoniczny silnik przegubu robota, przełożenie 100:1, moment szczytowy 80N·m, EtherCAT i CAN Bus, podwójny enkoder 17-bitowy
MyActuator
Nie można załadować gotowości do odbioru
Przegląd
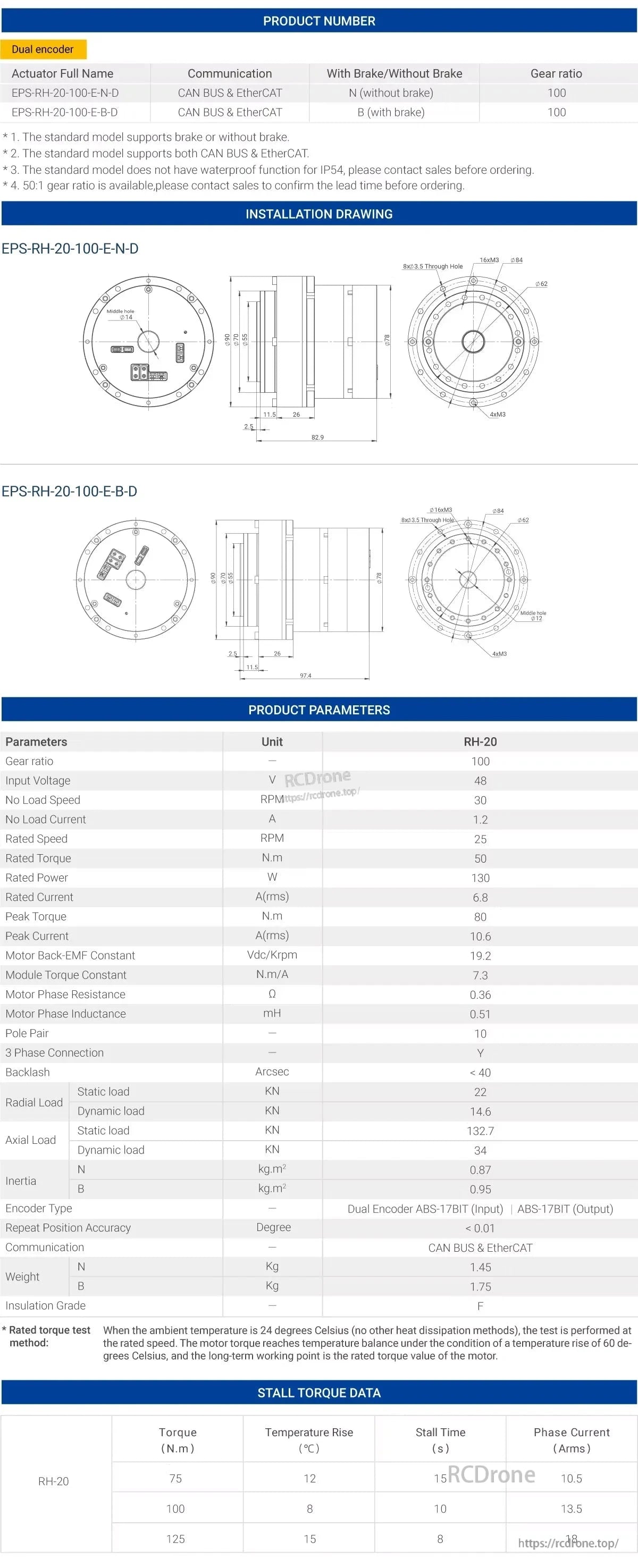
Silnik MyActuator RH-20 Harmonic Robot Joint Motor to wysokowydajny siłownik z przekładnią harmoniczną, zaprojektowany do zastosowań w stawach robotycznych, automatyzacji przemysłowej oraz precyzyjnych systemach ruchu. Z przekładnią 100:1, szczytowym momentem obrotowym 80N·m, nominalnym momentem obrotowym 50N·m oraz nominalną mocą 130W, ten siłownik zapewnia mocne, stabilne i efektywne działanie w kompaktowej formie.
Wyposażony w protokoły komunikacyjne EtherCAT i CAN Bus oraz podwójne 17-bitowe enkodery absolutne, RH-20 zapewnia wyjątkową dokładność powtarzalności pozycji (<0.01°), co czyni go idealnym do robotów humanoidalnych, współpracujących ramion robotycznych, robotów mobilnych oraz innych zastosowań precyzyjnych.
Kluczowe cechy
-
Wysoka moc wyjściowa – nominalny moment obrotowy 50N·m, szczytowy moment obrotowy 80N·m oraz nominalna moc 130W do zastosowań w ciężkich warunkach.
-
Precyzyjna kontrola – Podwójne enkodery ABS 17-bitowe zapewniają dokładność powtarzalności pozycji poniżej 0,01°.
-
Zaawansowana komunikacja – Obsługuje EtherCAT i CAN Bus dla szybkiej i niezawodnej kontroli w czasie rzeczywistym.
-
Solidna ochrona – Izolacja klasy F zapewnia bezpieczną i stabilną pracę podczas ciągłego użytkowania przy dużych obciążeniach.
-
Kompaktowa konstrukcja – Średnica 90 mm, wysokość 97,4 mm i zaledwie 1,75 kg wagi dla bezproblemowej integracji w systemach wieloosiowych.
-
Trwałe łożyska – Łożyska krzyżowe dla wysokiej nośności promieniowej i osiowej oraz długiej żywotności.
Specyfikacje techniczne
Wydajność silnika
| Parametr | Jednostka | Wartość |
|---|---|---|
| Przełożenie | – | 100 |
| Napięcie wejściowe | V | 48 |
| Obroty na biegu jałowym | RPM | 30 |
| Prąd na biegu jałowym | A | 1.2 |
| Obroty znamionowe | RPM | 25 |
| Moment obrotowy znamionowy | N·m | 50 |
| Moc znamionowa | W | 130 |
| Prąd znamionowy | A (rms) | 6.8 |
| Moment obrotowy szczytowy | N·m | 80 |
| Prąd szczytowy | A (rms) | 10.6 |
| Stała Back-EMF silnika | Vdc/Krpm | 19.2 |
| Stała momentu modułu | N·m/A | 7.3 |
| Opór fazy silnika | Ω | 0.36 |
| Indukcyjność fazy silnika | mH | 0.51 |
| Pary biegunów | – | 10 |
| Połączenie 3-fazowe | – | Y |
| Luźność | Arcsec | <40 |
Obciążenie i bezwładność
| Parametr | Jednostka | Wartość |
|---|---|---|
| Obciążenie promieniowe (statyczne/dynamiczne) | KN | 22 / 14.6 |
| Obciążenie osiowe (statyczne/dynamiczne) | KN | 132.7 / 34 |
| Bezładność (N/B) | kg·m² | 0.87 / 0.95 |
| Waga (N/B) | Kg | 1.45 / 1.75 |
| Typ enkodera | – | Dual ABS-17BIT (Wejście) / ABS-17BIT (Wyjście) |
| Dokładność powtarzalności pozycji | Stopień | <0.01 |
| Komunikacja | – | EtherCAT & CAN Bus |
| Klasa izolacji | – | F |
Dane momentu zablokowania
| Moment (N·m) | Wzrost temperatury (°C) | Czas zablokowania (s) | Prąd fazowy (A rms) |
|---|---|---|---|
| 75 | 12 | 15 | 10.5 |
| 100 | 8 | 10 | 13.5 |
| 125 | 15 | 8 | 18 |
Interfejs i Pinout
-
EtherCAT_IN / EtherCAT_OUT – Porty komunikacyjne o wysokiej prędkości
-
CAN_H / CAN_L – Terminale sieci CAN Bus
-
VCC / GND – Dodatnie i ujemne zasilanie
-
RES+ / RES- – Interfejs rezystora rozładowczego
-
BAT+ / BAT- – Połączenie baterii pamięci wieloobrotowej
-
T+, T-, R+, R- – Komunikacja master-slave i informacja zwrotna o statusie
Zawartość opakowania
-
Kabel zasilający ×2
-
Kabel komunikacyjny CAN Bus ×4
Bleeder Resistor Cable ×1
-
Wielozwojowy kabel akumulatorowy ×1
-
Opór końcowy 120Ω ×1
-
Kabel komunikacyjny EtherCAT ×2
-
Moduł komunikacyjny CAN Bus ×1 (Adapter USB-CAN)
Zastosowania
-
Stawy robotów humanoidalnych
-
Współpracujące ramiona robotyczne
-
Roboty mobilne i systemy napędowe AGV
-
Platformy precyzyjnego pozycjonowania
-
Zautomatyzowane urządzenia inspekcyjne i laboratoryjne
Szczegóły
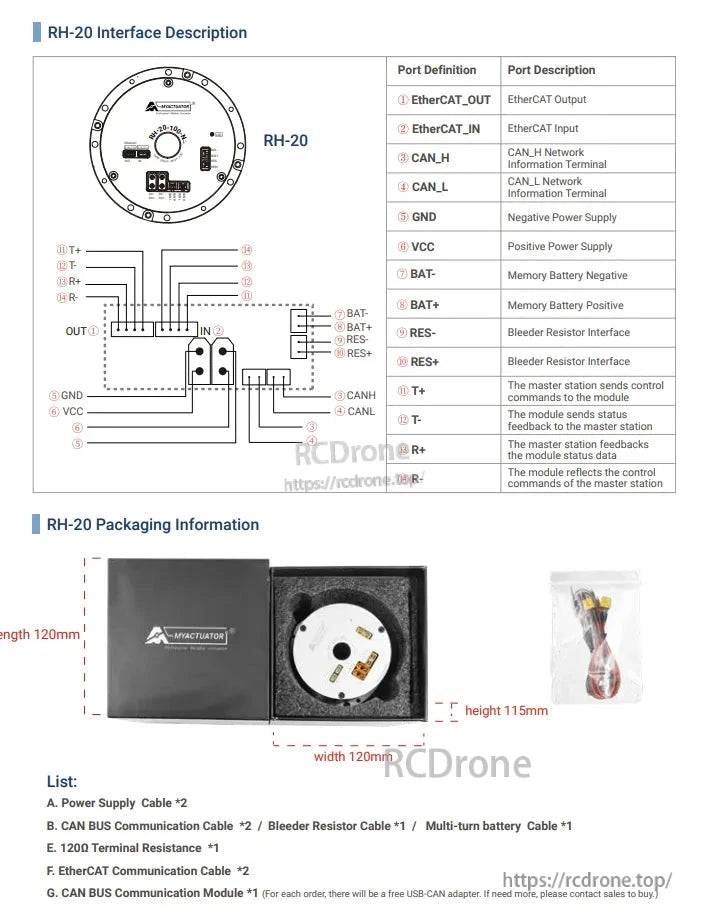
Interfejs silnika harmonicznego ma połączenia EtherCAT, CAN bus, zasilania i akumulatora. Opakowanie: 120x120x115mm. Zawiera kable, rezystory, moduły komunikacyjne do konfiguracji.
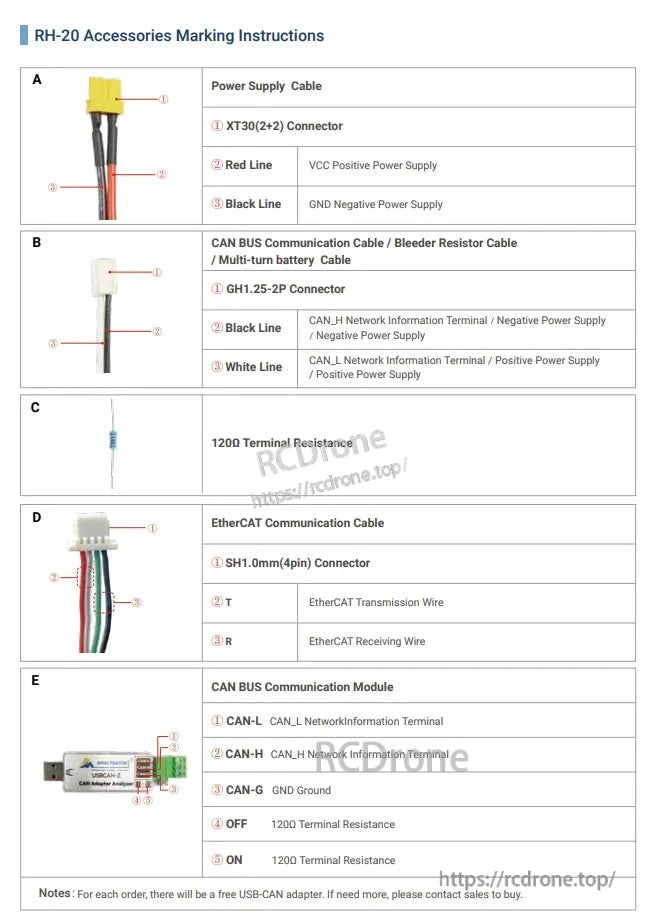
Akcesoria RH-20 zawierają instrukcje oznaczania dla kabli zasilających, CAN BUS, EtherCAT oraz modułu komunikacyjnego. Szczegóły obejmują typy złączy, kolory przewodów, funkcje i opór zacisków. Każde zamówienie zawiera darmowy adapter USB-CAN.
Related Collections





