






Moduł zrobotyzowanego przegubu MyActuator RH-32 Hollow Harmonic, 48V, 229Nm momentu szczytowego, podwójne enkodery 17-bitowe, CAN BUS & Sterowanie EtherCAT
Moduł zrobotyzowanego przegubu MyActuator RH-32 Hollow Harmonic, 48V, 229Nm momentu szczytowego, podwójne enkodery 17-bitowe, CAN BUS & Sterowanie EtherCAT
MyActuator
Nie można załadować gotowości do odbioru
Przegląd
Moduł MyActuator RH-32 Hollow Harmonic Robot Joint to siłownik o wysokim momencie obrotowym i wysokiej precyzji, zaprojektowany do ramion robotycznych, robotów humanoidalnych oraz systemów automatyzacji współpracy. Oferując przekładnię 100:1, napięcie wejściowe 48V oraz szczytowy moment obrotowy 229 N·m, RH-32 zapewnia wyjątkową wydajność w zastosowaniach wymagających płynnego ruchu, precyzyjnej kontroli i dużej nośności. Dzięki wsparciu dla podwójnych enkoderów (wejście/wyjście 17-bitowe), komunikacji CAN BUS &i EtherCAT oraz konstrukcji z pustym wałem, doskonale integruje się z zaawansowanymi systemami robotycznymi.
Kluczowe cechy
-
Wysoka wydajność momentu obrotowego – Oferuje do 150 N·m nominalnego momentu obrotowego oraz 229 N·m szczytowego momentu obrotowego, idealny do ciężkich stawów robotycznych.
-
Precyzyjna kontrola – Podwójne enkodery 17-bitowe zapewniają precyzyjne informacje zwrotne i powtarzalność <0.01°.
-
Wszechstronna komunikacja – Obsługuje CAN BUS oraz EtherCAT dla niezawodnej i elastycznej integracji systemu.
-
Solidna nośność – Obsługuje do 342.6 kN statycznego obciążenia osiowego oraz 81.6 kN dynamicznego obciążenia osiowego.
-
Kompaktowy, pusty design – Ułatwia prowadzenie kabli przez staw, co zapewnia czystsze i bezpieczniejsze ustawienie robota.
-
Wysoka niezawodność – Klasa izolacji F oraz zaawansowany projekt odprowadzania ciepła dla przemysłowej trwałości.
Specyfikacje techniczne
| Parametr | Jednostka | Wartość |
|---|---|---|
| Przełożenie | — | 100 |
| Napięcie wejściowe | V | 48 |
| Obroty na biegu jałowym | RPM | 20 |
| Prąd na biegu jałowym | A | 2.8 |
| Obroty znamionowe | RPM | 18 |
| Moment obrotowy znamionowy | N·m | 150 |
| Moc znamionowa | W | 282 |
| Prąd znamionowy | A(rms) | 21.8 |
| Maksymalny moment obrotowy | N·m | 229 |
| Maksymalny prąd | A(rms) | 32.1 |
| Stała napięcia wstecznego EMF silnika | Vdc/Krpm | 26.7 |
| Stała momentu modułu | N·m/A | 6.9 |
| Opór fazy silnika | Ω | 0.08 |
| Indukcyjność fazy silnika | mH | 0.18 |
| Para biegunów | — | 10 |
| Połączenie 3-fazowe | — | Y |
| Luźność | Arcsec | < 40 |
| Obciążenie promieniowe (statyczne/dynamiczne) | kN | 65.4 / 38.2 |
| Obciążenie osiowe (statyczne/dynamiczne) | kN | 342.6 / 81.6 |
| Bezładność (N/B) | kg·m² | 6.86 / 8.32 |
| Typ enkodera | — | Podwójny enkoder ABS-17BIT (Wejście/Wyjście) |
| Dokładność powtarzalności pozycji | Stopień | < 0.01 |
| Komunikacja | — | CAN BUS &i EtherCAT |
| Waga (N/B) | Kg | 4.32 / 4.74 |
| Klasa izolacji | — | F |
Opis interfejsu
RH-32 obsługuje komunikację EtherCAT i CAN, zapewniając niezawodne sterowanie w czasie rzeczywistym.
-
EtherCAT: Szybka, deterministyczna komunikacja dla automatyzacji przemysłowej.
-
CAN BUS: Elastyczna i stabilna komunikacja dla złożonych systemów wielostawnych.
-
Dedykowane złącza dla zasilania, informacji zwrotnej i sygnałów sterujących zapewniają bezpieczną i efektywną integrację.
Informacje o opakowaniu
-
Wymiary pudełka: 165mm × 165mm × 127mm
-
Dołączone akcesoria:
-
Kabel zasilający × 2
-
Kabel komunikacyjny CAN BUS × 2
-
Kabel rezystora upustowego × 1
-
Kabel akumulatora wieloobrotowego × 1
-
Opór na zacisku 120Ω × 1
-
Kabel komunikacyjny EtherCAT × 2
-
Moduł komunikacyjny CAN BUS × 1 (z darmowym adapterem USB-CAN)
- MyActuator Moduł stawowy robota RH-32-100 x 1
-
Zastosowania
-
Roboty współpracujące (coboty)
-
Roboty humanoidalne i serwisowe
Manipulatory przemysłowe
-
Zautomatyzowane pojazdy kierowane (AGV)
-
Systemy precyzyjnego pozycjonowania
Szczegóły
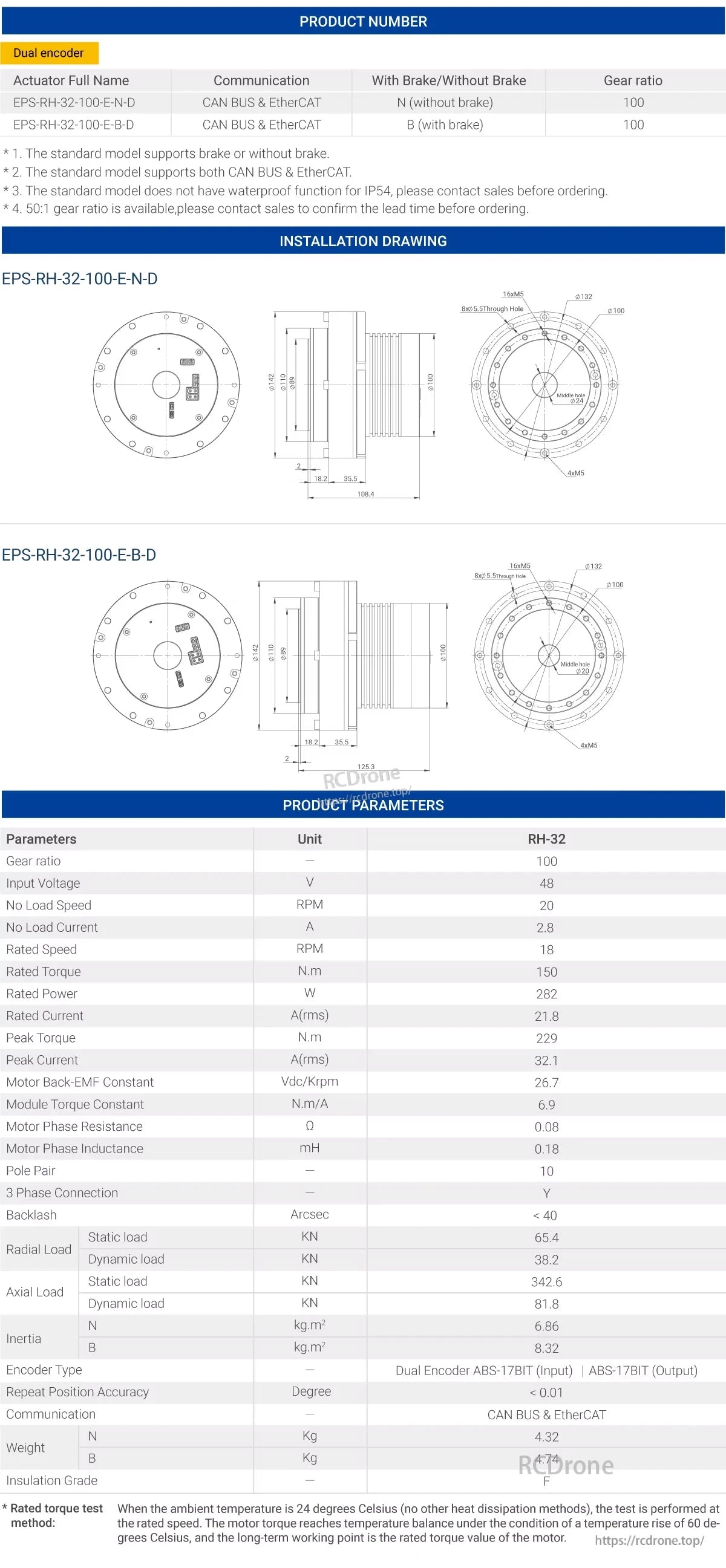
Staw robotyczny RH-32 oferuje podwójny enkoder, CAN BUS/EtherCAT, przełożenie 100:1, 48V, 150 N.m momentu obrotowego, 21.8 A prąd. Opcjonalny hamulec, IP54 dostępny.
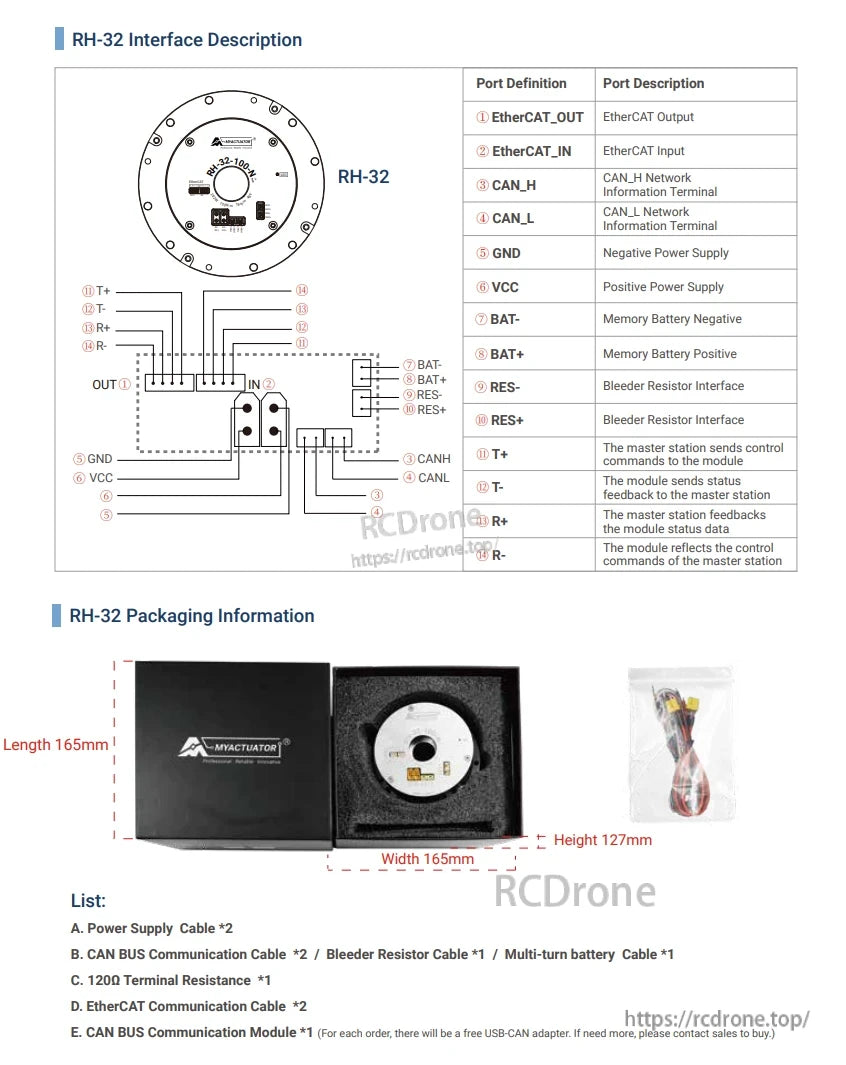
Staw joint RH-32 posiada interfejsy EtherCAT i CAN, definicje portów, wymiary 165x165x127mm. Zawiera kable, opór końcowy, moduł CAN.
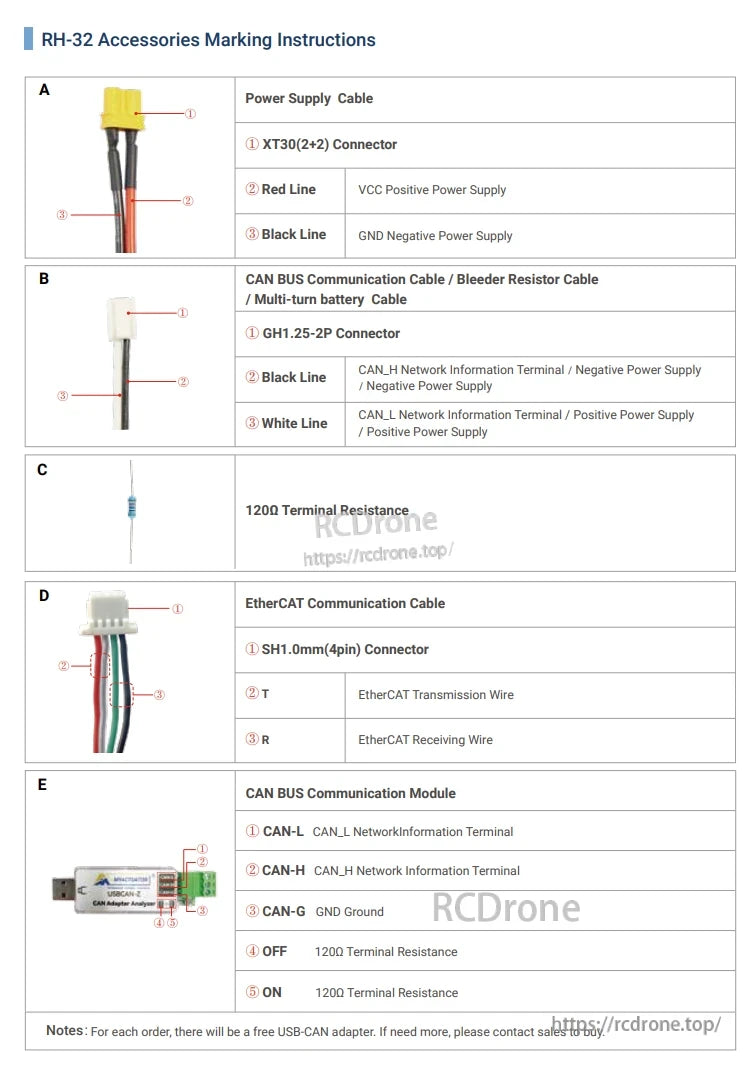
Akcesoria RH-32 obejmują kable zasilające, kable CAN BUS, EtherCAT, rezystor 120Ω oraz moduł CAN. Szczegóły obejmują złącza, funkcje przewodów i opory końcowe dla prawidłowej instalacji i komunikacji. Bezpłatny adapter USB-CAN dołączony do każdego zamówienia.
Related Collections






