




Serwomechanizm MyActuator RMD-X12-320, silnik z wysokim momentem obrotowym, EtherCAT i CAN BUS, adapter USB-CAN, rezystor 120Ω
Serwomechanizm MyActuator RMD-X12-320, silnik z wysokim momentem obrotowym, EtherCAT i CAN BUS, adapter USB-CAN, rezystor 120Ω
MyActuator
Nie można załadować gotowości do odbioru
Przegląd
MyActuator RMD-X12-320 to wysokowydajny serwoaktuator zaprojektowany do robotów przemysłowych, robotów współpracujących oraz systemów automatyzacji o wysokiej precyzji. Integruje silnik o wysokim momencie obrotowym, przekładnię planetarną oraz zaawansowaną elektronikę sterującą w kompaktowej formie, co umożliwia płynne sterowanie ruchem oraz niezawodną komunikację EtherCAT lub CAN BUS.
Dzięki zoptymalizowanej konstrukcji i bogatym opcjom interfejsu, RMD-X12-320 zapewnia wyjątkową wydajność, precyzyjne sterowanie i elastyczność dla wymagających aplikacji robotycznych.
Kluczowe cechy
-
Zintegrowana konstrukcja: Silnik, sterownik i reduktor zintegrowane w jednym kompaktowym module.
-
Wysoka moc wyjściowa: Idealny do ciężkich stawów robotycznych i systemów automatyzacji.
-
Wiele protokołów komunikacyjnych: Obsługuje zarówno EtherCAT, jak i CAN BUS.
-
Precyzyjna informacja zwrotna: Wysokorozdzielcze enkodery dla płynnego ruchu i pozycjonowania.
-
Łatwe podłączenie: Wyraźnie oznakowane kable i dołączone adaptery do szybkiej konfiguracji.
-
Szeroka kompatybilność: Odpowiednie dla robotów przemysłowych, robotów współpracujących, AGV oraz ramion automatyzacyjnych.
Opis interfejsu
| Port | Definicja | Opis |
|---|---|---|
| 1. EtherCAT_OUT | Wyjście EtherCAT | Wyjście komunikacyjne do innych modułów. |
| 2. EtherCAT_IN | Wejście EtherCAT | Wejście komunikacyjne z kontrolera głównego. |
| 3. VCC | Zasilanie dodatnie | Główne dodatnie wejście DC. |
| 4. CAN_L | CAN bus niski | Sygnal niski CAN dla komunikacji CAN. |
| 5. CAN_H | CAN bus wysoki | Sygnal wysoki CAN dla komunikacji CAN. |
| 6. GND | Uziemienie | Ujemne złącze zasilania. |
| 7. T- / 8. T+ | Linie sprzężenia zwrotnego | Informacja o statusie modułu do stacji głównej. |
| 9. R- / 10. R+ | Linie poleceń | Sygnaly sterujące wysyłane z stacji głównej do aktuatora. |
Dołączone akcesoria
| Etykieta | Przedmiot | Opis |
|---|---|---|
| A | Zasilacz + kabel CAN BUS ×2 | Zawiera złącze zasilacza XT90 z białymi (CAN_L), żółtymi (CAN_H), czerwonymi (VCC) i czarnymi (GND) przewodami. |
| B | Opornik końcowy 120Ω ×1 | Do zakończenia magistrali CAN. |
| C | Kabel komunikacyjny EtherCAT ×2 | Złącza SH1.0mm 4-pin do transmisji i odbioru sygnału EtherCAT. |
| D | Moduł komunikacyjny CAN BUS ×1 | Adapter USB-do-CAN do diagnostyki i integracji. Zawiera przełączalną terminację 120Ω. |
Informacje o opakowaniu
-
Wymiary pudełka: 280 mm (Długość) × 230 mm (Szerokość) × 130 mm (Wysokość)
-
Zawartość:
-
X12-320 Serwo Aktuator ×1
-
Zasilacz + Kabel komunikacyjny CAN BUS ×2
-
Opór końcowy 120Ω ×1
-
Kabel komunikacyjny EtherCAT ×2
-
Moduł komunikacyjny CAN BUS ×1 (adapter USB-CAN)
-
Zastosowania
-
Roboty przemysłowe i roboty współpracujące
-
AGV (Automatyczne Pojazdy Kierowane) i AMR (Autonomiczne Roboty Mobilne)
-
Ramiona robotyczne do automatyzacji i precyzyjnego montażu
Platformy badawczo-rozwojowe wymagające niezawodnej kontroli ruchu
Szczegóły
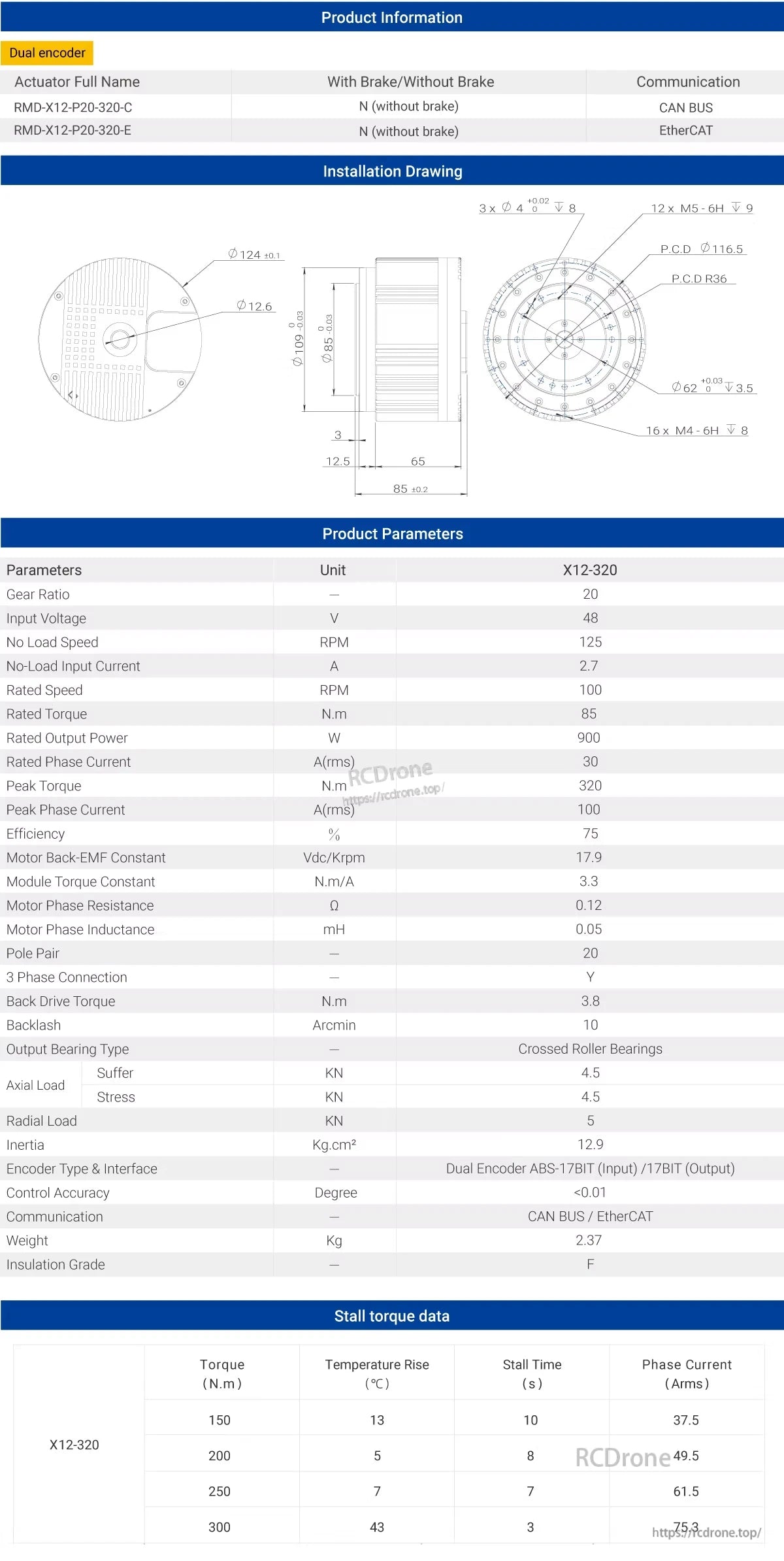
MyActuator serwoaktuator RMD-X12-P20-320, podwójny enkoder, 20 przełożenie, 48V zasilanie, 900W moc, 85Nm moment obrotowy nominalny, komunikacja CAN BUS/EtherCAT, 2.37kg waga, łożyska krzyżowe, 12.9kg.cm² bezwładność.

Interfejs serwo X12-320 obsługuje EtherCAT, magistralę CAN oraz połączenia zasilania. Opakowanie: 280×230×130mm. Zawiera zasilacz, kable, rezystory oraz darmowy adapter USB-CAN.

Akcesoria X12-320 obejmują zasilacz, kable CAN BUS, EtherCAT oraz szczegóły modułu. Kolorowe przewody, złącza i terminale zapewniają prawidłowy montaż. Darmowy adapter USB-CAN dołączony do zamówienia.

Serwo RMD X12 320: czas reakcji 100μs, podwójny enkoder, EtherCAT/CAN, moment obrotowy 320N.m, Ø124mm×85mm, do robotyki i automatyzacji.

Silnik serwo RMD-X12-P20-320-C : zasilanie 48V, przełożenie 20:1, szczytowa moc 900W, podwójne enkodery 17-bitowe, CAN BUS/EtherCAT, 2.37kg, z dokładnymi wymiarami.

Serwomotor X12-320L z zasilaniem, kablami CAN BUS, EtherCAT oraz rezystorem terminującym 1200.

Wyświetlacz opakowania serwomechanizmu MYACTUATOR, w tym kable CAN BUS i rezystor 120Ω.
Related Collections




