





MyActuator RMD-X2-7 Robotyczny Siłownik Planetarny 7N·m 24V 28:1 Podwójny Enkoder CAN EtherCAT Silnik Serwo
MyActuator RMD-X2-7 Robotyczny Siłownik Planetarny 7N·m 24V 28:1 Podwójny Enkoder CAN EtherCAT Silnik Serwo
MyActuator
Nie można załadować gotowości do odbioru
Przegląd
Kluczowe cechy
-
Wysoka precyzja kontroli – System podwójnych enkoderów (wejście 17-bit, wyjście 18-bit) z dokładnością kontroli <0.01°.
-
Silna wydajność – Moc nominalna 37 W, prąd nominalny 3 A, sprawność 63%.
-
Kompleksowy design – Średnica 44 mm, długość 63.5 mm, waga zaledwie 0.26 kg.
-
Łatwy ruch – Sterowanie oparte na polu (FOC), niskie luzowanie (≤12 arcmin) oraz stała momentu 0.8 N·m/A.
-
Trwałość – Łożyska kulkowe głębokiego rowka, klasa izolacji F oraz solidna obudowa aluminiowa.
-
Elastyczna łączność – Kompatybilność z protokołami CAN BUS oraz EtherCAT.
-
Bezpieczeństwo i stabilność – Prąd szczytowy 8.1 A, wydajność nominalna oraz wytrzymałość momentu zastoju testowana przy różnych prądach fazowych.
Specyfikacje
| Parametr | Wartość |
|---|---|
| Przełożenie | 28.17:1 |
| Napięcie wejściowe | 24 V |
| Prędkość bez obciążenia | 178 RPM |
| Prędkość znamionowa | 142 RPM |
| Moment obrotowy znamionowy | 2.5 N·m |
| Moment obrotowy szczytowy | 7 N·m |
| Moc znamionowa | 37 W |
| Prąd fazowy znamionowy | 3 A (rms) |
| Prąd fazowy szczytowy | 8.1 A (rms) |
| Sprawność | 63% |
| Stała EMF silnika | 4.3 Vdc/Krpm |
| Stała momentu | 0.8 N·m/A |
| Opór silnika | 0.61 Ω |
| Indukcyjność silnika | 0.13 mH |
| Pary bieżne | 13 |
| Moment obrotowy napędu zwrotnego | 0.4 N·m |
| Luzy | ≤12 arcmin |
| Typ łożyska | Łożyska kulkowe głębokie |
| Obciążenie osiowe | 0.25 KN |
| Obciążenie promieniowe | 1 KN |
| Bezwładność | 0.17 Kg·cm² |
| Typ enkodera | Podwójny enkoder ABS-17bit (wejście)/18bit (wyjście) |
| Komunikacja | CAN BUS / EtherCAT |
| Waga | 0.26 kg |
| Klasa izolacji | F |
Dane momentu zastoju
| Moment (N·m) | Wzrost temperatury (°C) | Czas zastoju (s) | Prąd fazowy (A rms) |
|---|---|---|---|
| 3.75 | 20 | 15 | 4.3 |
| 5.0 | 48 | 10 | 5.7 |
| 6.25 | 31 | 8 | 7.4 |
| 7.5 | 59 | 5 | 8.6 |
Akcesoria (w zestawie)
-
Zasilacz + kabel komunikacyjny CAN BUS ×1
-
Opór końcowy 120Ω ×1
-
Kabel komunikacyjny EtherCAT ×2
-
Moduł komunikacyjny CAN BUS (adapter USB-CAN) ×1
Aplikacje
MyActuator RMD-X2-7 jest idealny do ramion robotycznych, robotów humanoidalnych, egzoszkieletów, gimbali oraz systemów automatyzacji przemysłowej, gdzie wymagane są precyzyjna kontrola momentu obrotowego, kompaktowy rozmiar i komunikacja dwukanałowa.
Szczegóły

Silnik serwo bezszczotkowy X2-7, podwójny enkoder ABS-17BIT wejście/18BIT wyjście, 37W, 2.5N.m, 142rpm, magistrala CAN, 128, wskaźnik LED.

Siłownik planetarny RMD X2-7 z podwójnym enkoderem EtherCAT+CAN BUS. Posiada 28.17 przełożenie, 24V wejście, 142RPM prędkość, 2.5N.m moment obrotowy i 37W moc. Zawiera wymiary instalacyjne i specyfikacje techniczne.

RMD-X2-P28-7 oferuje podwójny enkoder, 24V wejście, 2.5N.m moment obrotowy, 142 RPM, CAN BUS/EtherCAT oraz wagę 0.26kg. Zawiera rysunek instalacyjny i szczegółowe specyfikacje, takie jak moment obrotowy przy zablokowaniu i dane elektryczne.

Interfejs X2-7 zawiera VCC, GND, CAN_H, CAN_L, EtherCAT IN/OUT oraz porty T+/T-, R+/R-. Opakowanie: pudełko 65x65x55mm z zasilaczem, kablem CAN, rezystorem 120Ω, kablem EtherCAT i dwoma modułami CAN. Bezpłatny adapter USB-CAN dołączony do każdego zamówienia.
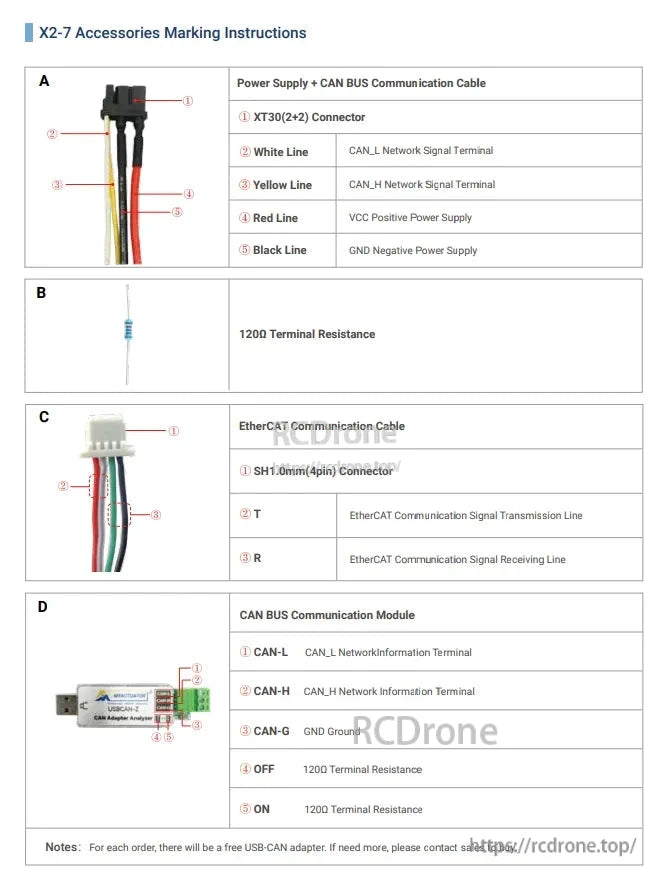
Instrukcje oznakowania szczegółowo opisują zasilanie, kable CAN BUS, EtherCAT, złącza, opór końcowy. Zawiera notatkę o adapterze USB-CAN dla zamówień.

Serwomotor MYACTUATOR X2-7 dostarcza moc 37W i moment obrotowy 2.5N.m, z podwójnym enkoderem, prędkością 1.42rpm i przełożeniem 1:28.Zawiera zasilacz, kabel komunikacyjny CAN BUS, opór końcowy, kable EtherCAT oraz moduł CAN. W zestawie znajduje się bezpłatny adapter USB-CAN. Oznaczone VCC, GND, CANH, CANL oraz sygnał I/O zapewniają łatwą konfigurację. Posiada certyfikaty CE i RoHS, oferując profesjonalną, niezawodną i innowacyjną wydajność.
Related Collections





