






Siłownik planetarny MyActuator RMD-X4-10 10N·m, podwójny enkoder, EtherCAT+CAN, napęd przegubu robota
Siłownik planetarny MyActuator RMD-X4-10 10N·m, podwójny enkoder, EtherCAT+CAN, napęd przegubu robota
MyActuator
Nie można załadować gotowości do odbioru
Przegląd
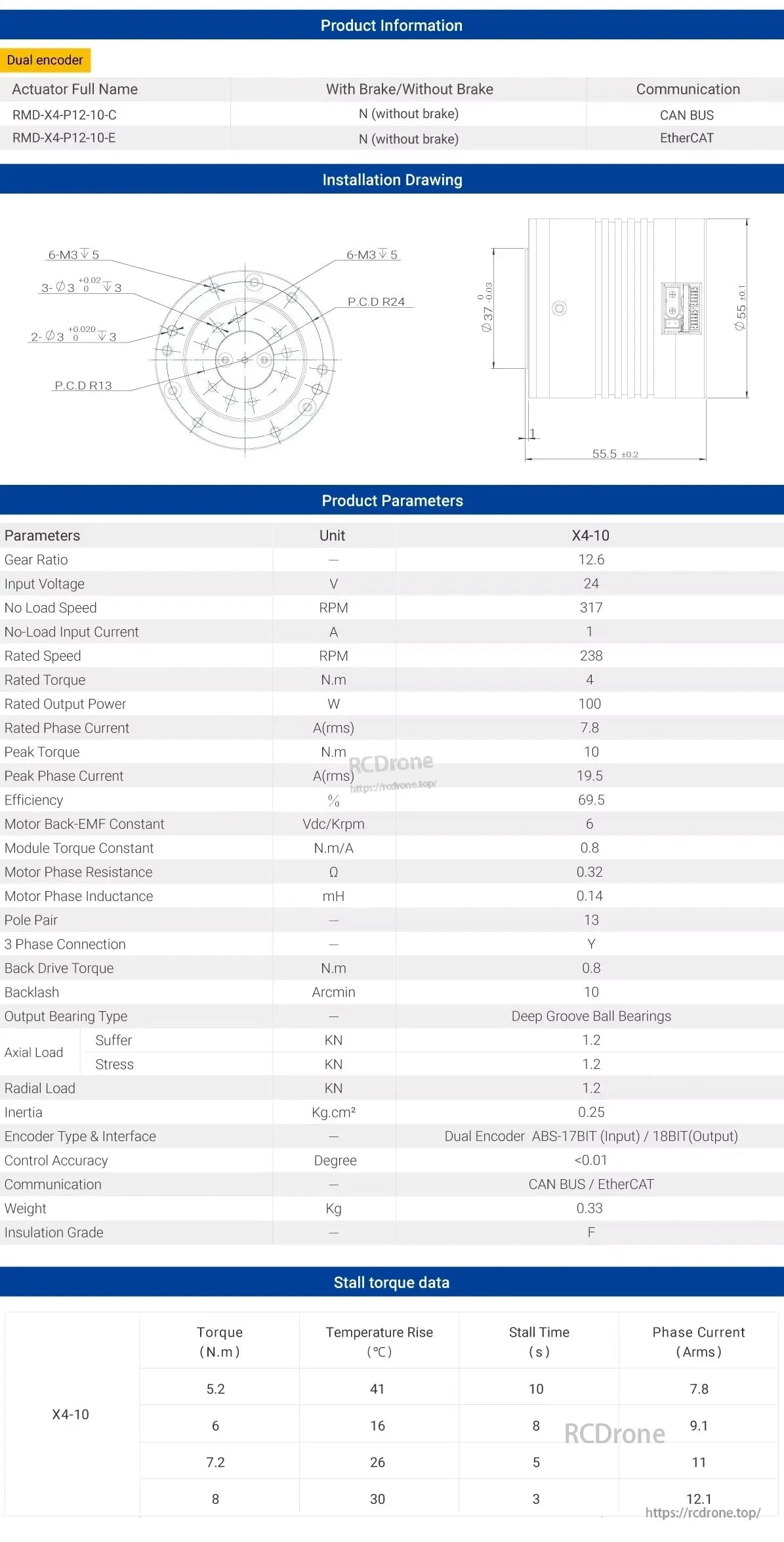
Moduł MyActuator RMD-X4-10 to wysokowydajny moduł silnika DC zaprojektowany do zaawansowanych zastosowań robotycznych. Oferuje przekładnię planetarną 12,6:1, szczytowy moment obrotowy 10N·m oraz nominalną moc wyjściową 100W, integrując system podwójnych enkoderów (wejście 17-bit / wyjście 18-bit), który zapewnia precyzyjną kontrolę 0,01°. Jego duża pusta struktura wspiera integrację wielu czujników, umożliwiając centralny hub do pełnej kontroli postawy ciała w robotach humanoidalnych. Dzięki komunikacji dualnej protokołów EtherCAT i CAN, siłownik osiąga ultra-szybką reakcję 250μs, co czyni go idealnym do scenariuszy o wysokiej dynamice i niezawodności, takich jak roboty humanoidalne, napędy bioniczne nóg oraz automatyzacja przemysłowa.
Kluczowe cechy
-
Wysoka precyzja podwójnego enkodera: wejście 17-bit / wyjście 18-bit z 0.01° dokładność
-
Maksymalny moment obrotowy 10N·m przy przełożeniu planetarnym 12.6:1
-
Łożysko krzyżowe: Wyjątkowa zdolność do przeciwdziałania momentowi zginającemu dla stabilnych stawów robotycznych
-
EtherCAT + CAN Bus Podwójna komunikacja: Wspiera połączenie wielu maszyn, ultra-szybka reakcja 250μs
-
Duża pusta struktura: Umożliwia integrację czujników, kabli i pierścieni ślizgowych dla złożonych systemów robotycznych
-
Wysoka niezawodność: Zaprojektowane do kontroli chodu humanoidalnego, płynne przejścia podczas biegu, skakania i złożonych ruchów
-
Kompaktowe i lekkie: Φ55mm × 55.5mm, waga 0.33kg
Specyfikacje
| Parametr | Wartość |
|---|---|
| Model | RMD-X4-10 |
| Przełożenie | 12.6:1 |
| Napięcie wejściowe | 24V DC |
| Prędkość znamionowa | 238 RPM |
| Prędkość bez obciążenia | 317 RPM |
| Moc wyjściowa znamionowa | 100W |
| Moment obrotowy znamionowy | 4N·m |
| Moment obrotowy szczytowy | 10N·m |
| Prąd znamionowy | 7.84A |
| Prąd jałowy | 1A |
| Typ enkodera | Enkoder podwójny (ABS-17bit / 18bit) |
| Komunikacja | EtherCAT + CAN Bus |
| Waga | 0.33kg |
| Rozmiar | Ø55mm × 55.5mm |
Zastosowania
-
Roboty humanoidalne – Napędy stawowe dla ramion, nóg i tułowia
-
Napędy bioniczne nóg – Wysoki moment obrotowy z konstrukcją przeciwdziałającą zginaniu dla biegu i skoków
-
Roboty współpracujące – Płynna kontrola ruchu dla automatyzacji przemysłowej
-
Egzoszkielety – Lekki, wysokodynamikowy napęd dla urządzeń wspomagających ludzi
-
Elastyczne linie produkcyjne – Synchronizacja wieloosiowa przez komunikację EtherCAT o wysokiej prędkości
Opakowania i akcesoria
-
Zasilacz + Kabel komunikacyjny CAN Bus ×1
-
Opór końcowy 120Ω ×1
Kabel komunikacyjny EtherCAT ×2
-
Moduł komunikacyjny CAN Bus ×1 (adapter USB-CAN w zestawie)
Wymiary opakowania: 100mm × 100mm × 70mm
Szczegóły

RMD-X4-PT2.5-10-C napęd stawowy robota z podwójnym enkoderem, zasilany napięciem 24V, z przełożeniem 12,6, momentem obrotowym 4N·m i mocą 100W. Posiada interfejs CAN BUS/EtherCAT, prędkość bez obciążenia 317RPM oraz wagę 0,28kg. Zawiera wymiary instalacyjne i specyfikacje techniczne.

Siłownik planetarny z maksymalnym momentem obrotowym 10N.m, przełożeniem 12,6:1, wagą 0,33kg. Rozmiar: Ø55mm×55,5mm. Posiada komunikację EtherCAT/CANBUS, podwójny enkoder, szybki MCU, układy CAN oraz łożyska kulkowe głębokie.

Podwójny enkoder ABS-17BIT wejście / 18BIT wyjście, X4-10, SN:40225621, MYACTUATOR

Siłownik planetarny RMD-X4-10 firmy MYACTUATOR oferuje moc 100W, moment obrotowy 46Nm, podwójny enkoder, prędkość 238rpm. W zestawie kabel zasilający + kabel CAN BUS, rezystor 120Ω, kabel EtherCAT, moduł CAN BUS oraz darmowy adapter USB-CAN.
Siłownik planetarny RMD-X4-10 Robotic Planetary Actuator ma podwójny enkoder, 12.6 przełożenie, zasilanie 24V, moc 100W oraz CAN BUS/EtherCAT. Oferuje moment obrotowy 4N.m, prędkość 238 RPM, waży 0.33kg i wykorzystuje łożyska kulkowe głębokiego rowka dla wysokiej wydajności.

Interfejs X4-10 zawiera porty zasilania, CAN i EtherCAT. Opakowanie zawiera zasilacz, kable, rezystory i moduł. Wymiary: 100x100x70mm. Każde zamówienie zawiera adapter USB-CAN.

Akcesoria X4-10 obejmują zasilacz, kable CAN BUS i EtherCAT, opór końcowy oraz moduł CAN BUS. Szczegóły dotyczą złącz, funkcji przewodów, linii sygnałowych oraz uwag dotyczących adaptera USB-CAN.
Related Collections






