





MyActuator RMD-X4-36 34N·m Siłownik planetarny, bezszczotkowy silnik DC z podwójnym enkoderem, EtherCAT i CAN Bus, przełożenie 36:1
MyActuator RMD-X4-36 34N·m Siłownik planetarny, bezszczotkowy silnik DC z podwójnym enkoderem, EtherCAT i CAN Bus, przełożenie 36:1
MyActuator
Nie można załadować gotowości do odbioru
Przegląd
Silnik MyActuator RMD-X4-36 Planetary Actuator DC Brushless Motor to wysokowydajny siłownik stawowy zaprojektowany do systemów robotyki i automatyzacji, które wymagają precyzyjnej kontroli ruchu, wysokiego momentu obrotowego i kompaktowej integracji. Z szczytowym momentem obrotowym 34N·m, przekładnią 36:1 oraz strukturą łożyska z krzyżowymi rolkami, zapewnia doskonałą odporność na zginanie i trwałość. Wyposażony w podwójne protokoły komunikacyjne EtherCAT + CAN oraz ultra-szybką reakcję 250μs, ten siłownik jest idealny do robotów humanoidalnych, ramion robotycznych, platform mobilnych i innych zaawansowanych zastosowań robotycznych. Jego projekt z podwójnym enkoderem (wejście ABS 17-bit / wyjście 18-bit) zapewnia ultra-wysoką dokładność pozycjonowania, podczas gdy kompaktowy rozmiar (55mm × 61mm, 0.36kg) umożliwia lekką i efektywną integrację.
Kluczowe cechy
-
Wysoka precyzja podwójnego enkodera: 17-bitowy (wejście) + 18-bitowy (wyjście) dla dokładności 0,01°.
-
Protokół EtherCAT + CAN Bus: Elastyczna komunikacja z ultra-szybką odpowiedzią 250μs.
-
Łożyska krzyżowe: Doskonała odporność na zginanie i długa żywotność.
-
Wysoka gęstość mocy: Kompaktowa średnica 55mm, długość 61mm i tylko 0,36kg wagi.
-
Maksymalny moment obrotowy 34N·m oraz Nominalny moment obrotowy 11,5N·m zapewniają stabilne, mocne wyjście ruchu.
-
Wysoka wydajność: 100W mocy nominalnej z płynną technologią FOC (Sterowanie zorientowane na pole).
-
Wszechstronne zastosowanie: Zaprojektowane dla robotów humanoidalnych, egzoszkieletów, manipulatorów i systemów automatyzacji.
Specyfikacje
| Parametr | Wartość |
|---|---|
| Model | RMD-X4-P36-36-C |
| Napięcie wejściowe | 24V |
| Przełożenie | 36:1 |
| Obroty na biegu jałowym | 111 RPM |
| Prąd na biegu jałowym | 0.9 A |
| Obroty znamionowe | 83 RPM |
| Moment obrotowy znamionowy | 11.5 N·m |
| Moc wyjściowa znamionowa | 100 W |
| Moment obrotowy szczytowy | 34 N·m |
| Prąd fazowy szczytowy | 21.5 A (rms) |
| Pary biegunowe | 13 |
| Typ enkodera | Podwójny enkoder ABS 17-bitowy (wejście) / 18-bitowy (wyjście) |
| Protokoły komunikacyjne | EtherCAT / CAN Bus |
| Rozmiar | Ø55mm × 61mm |
| Waga | 0.36 kg |
Zawartość opakowania
-
1 × Silnik aktuatora planetarnego RMD-X4-36
-
1 × Zasilacz + Kabel komunikacyjny CAN Bus
-
1 × Rezystor końcowy 120Ω
-
2 × Kable komunikacyjne EtherCAT
-
1 × Moduł komunikacyjny CAN Bus (adapter USB-CAN)
Zastosowania
-
Roboty humanoidalne i bioniczne
-
Roboty współpracujące z ramionami
-
Egzoszkielety i roboty rehabilitacyjne
-
Roboty serwisowe i platformy mobilne
-
Systemy automatyzacji precyzyjnej wymagające kompaktowych, wysokotorowych aktuatorów
Szczegóły

Siłownik planetarny z momentem szczytowym 34N.m, przełożeniem 36:1, 0.36 kg wagi, Ø55mm×61mm rozmiaru. Cechy komunikacji EtherCAT/CANBUS, podwójnego enkodera, szybkiego MCU, chipów CAN oraz łożysk krzyżowych.

Silnik RMD-X4-P36-36: 24V, 10.5N.m moment obrotowy, 83RPM, podwójny enkoder, EtherCAT+CAN BUS, 36 przełożenie, 0.36kg, enkoder ABS-17BIT/18BIT, szczegółowe wymiary w zestawie.

Silnik X4-36, 100W, 12N.m, podwójny enkoder, 17BIT wejście, 18BIT wyjście, 63rpm, 1:36 przełożenie, interfejs CAN bus, wskaźnik LED.

Silnik MYACTUATOR X4-36, 100W, 12N.m, podwójny enkoder, 83rpm, 1:36 przełożenie. Zawiera zasilacz, kabel CAN BUS, rezystor 120Ω, kable EtherCAT oraz moduł CAN BUS z darmowym adapterem USB-CAN.
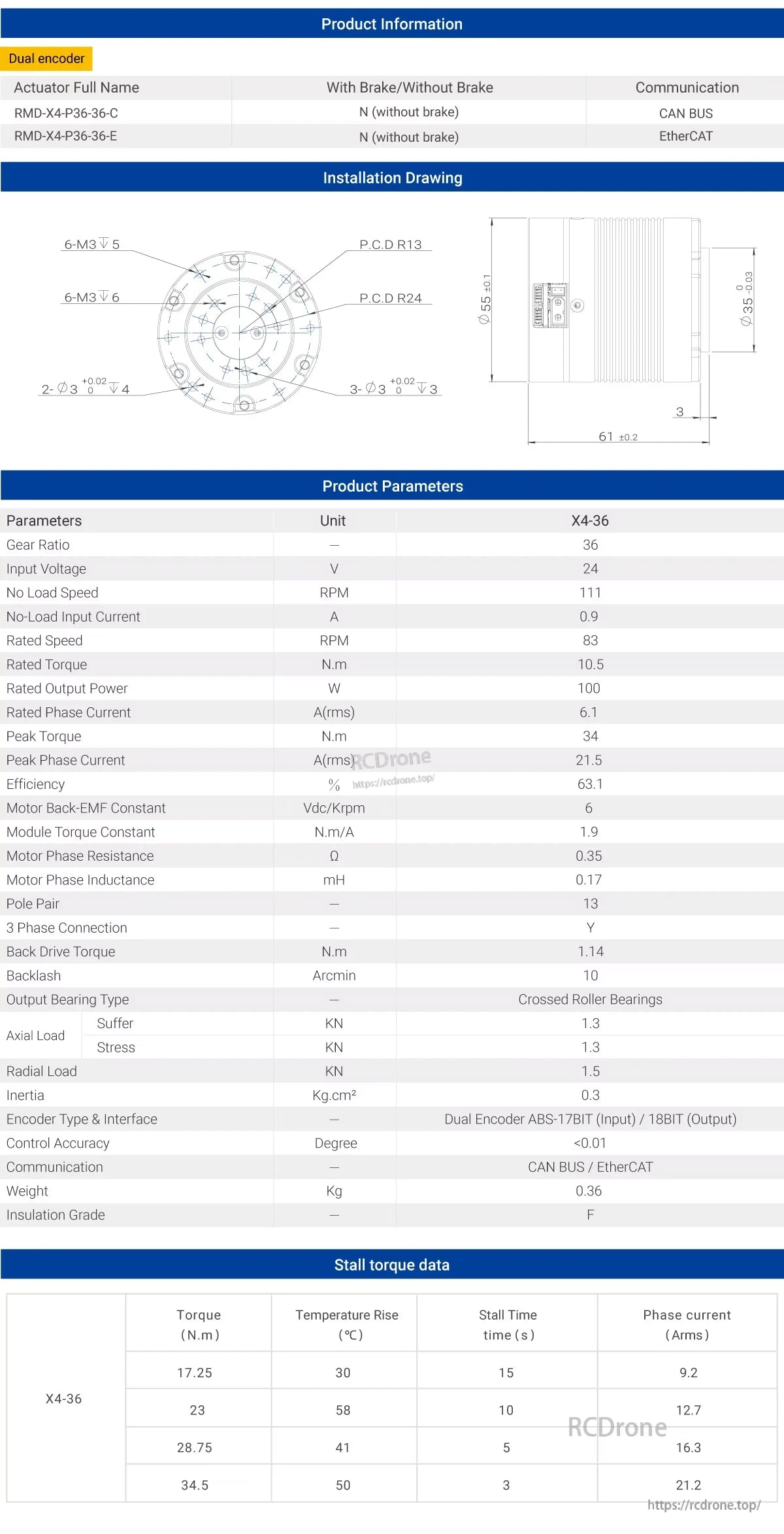
Silnik RMD-X4-P36-36 ma podwójny enkoder, 36 przełożenie, 24V wejście, 100W wyjście, CAN BUS/EtherCAT. Moment obrotowy nominalny: 10.5 N.m, prędkość: 83 RPM, waga: 0.36 kg. Dane dotyczące momentu obrotowego przy zablokowaniu obejmują moment obrotowy, wzrost temperatury, czas oraz wartości prądu fazowego.

Szczegóły interfejsu obejmują porty zasilania, CAN i EtherCAT. Opakowanie zawiera silnik, kable, rezystory, moduły komunikacyjne. Wymiary: 100x100x70mm. Zawiera adapter USB-CAN.
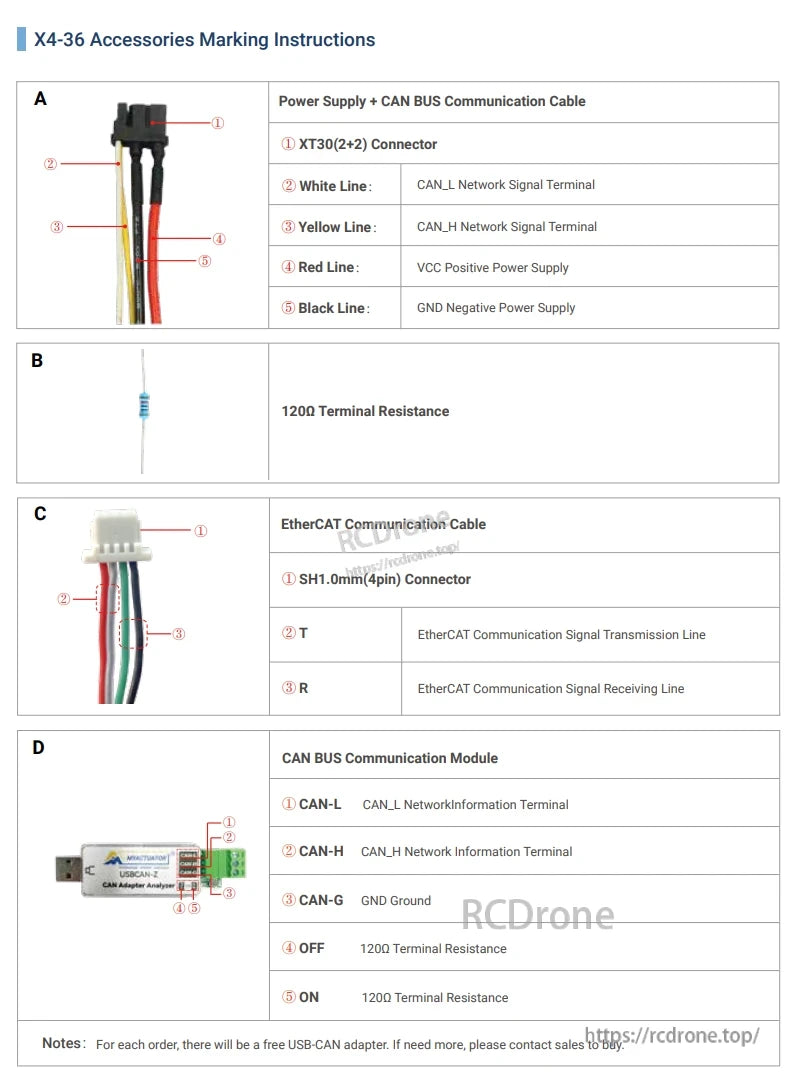
Akcesoria X4-36 obejmują zasilacz, kable CAN BUS, EtherCAT, rezystancję 120Ω oraz moduł CAN. Szczegóły obejmują złącza, kolory przewodów, linie sygnałowe oraz ustawienia terminali dla połączeń komunikacyjnych i zasilających. Adapter USB-CAN dołączony do każdego zamówienia.
Related Collections





