





Serwomechanizm MyActuator RMD-X6-60 z podwójnym enkoderem 320W 20N·m 60N·m szczyt 48V EtherCAT CAN BUS Wysokoprecyzyjny silnik do przegubów robotycznych
Serwomechanizm MyActuator RMD-X6-60 z podwójnym enkoderem 320W 20N·m 60N·m szczyt 48V EtherCAT CAN BUS Wysokoprecyzyjny silnik do przegubów robotycznych
MyActuator
Nie można załadować gotowości do odbioru
Przegląd
Inteligentny serwomechanizm MyActuator RMD-X6-60 to kompaktowa, wysokowydajna zintegrowana jednostka napędowa zaprojektowana do zastosowań w robotyce, automatyzacji i precyzyjnej kontroli ruchu. Wyposażona w interfejsy komunikacyjne EtherCAT i CAN BUS oraz system podwójnych enkoderów, ten aktuator oferuje wysoką gęstość momentu obrotowego, precyzyjną kontrolę i zarządzanie ruchem w wielu trybach. Jest idealny do stawów robotów, ramion robotycznych, robotów mobilnych oraz systemów automatyzacji przemysłowej, które wymagają wysokiej precyzji i niezawodności.
Kluczowe parametry:
-
Moc znamionowa: 320W
-
Moment obrotowy znamionowy: 20N·m
-
Moment obrotowy szczytowy: 60N·m
-
Prędkość znamionowa: 153RPM
-
Przełożenie: 19.612:1
-
Precyzja podwójnego enkodera: 17-bitowe wejście / 17-bitowe wyjście
-
Protokoły komunikacyjne: CAN BUS, EtherCAT
-
Napięcie wejściowe: 48V
Kluczowe cechy
-
Projekt podwójnego enkodera
Zintegrowane 17-bitowe enkodery wejściowe i wyjściowe zapewniają precyzyjne informacje zwrotne dla dokładnej kontroli ruchu i monitorowania stanu. -
Wsparcie dla wielu protokołów
Wbudowane interfejsy EtherCAT i CAN BUS zapewniają szeroką kompatybilność z różnymi platformami sterowania robotami i automatyzacją. -
Wysoka gęstość mocy i momentu obrotowego
Możliwość dostarczania 320W mocy ciągłej oraz 60N·m momentu szczytowego, spełniając wymagania dynamicznych i obciążonych aplikacji. -
Tryby sterowania hybrydowego
Obsługuje hybrydowe sterowanie pozycją, prędkością i momentem, co umożliwia zaawansowane systemy ruchu wieloosiowego i skoordynowanego. -
Wysoka precyzja sprzężenia zwrotnego i szybka reakcja
Zintegrowane procesory MCU o wysokiej prędkości i CAN zapewniają reakcję na poziomie milisekund dla precyzyjnego sterowania. -
Kompaktowy i lekki design
Wymiary 120mm × 120mm × 80mm oraz waga 0.82kg czynią go idealnym do lekkich aplikacji robotycznych, gdzie przestrzeń i waga są kluczowe.
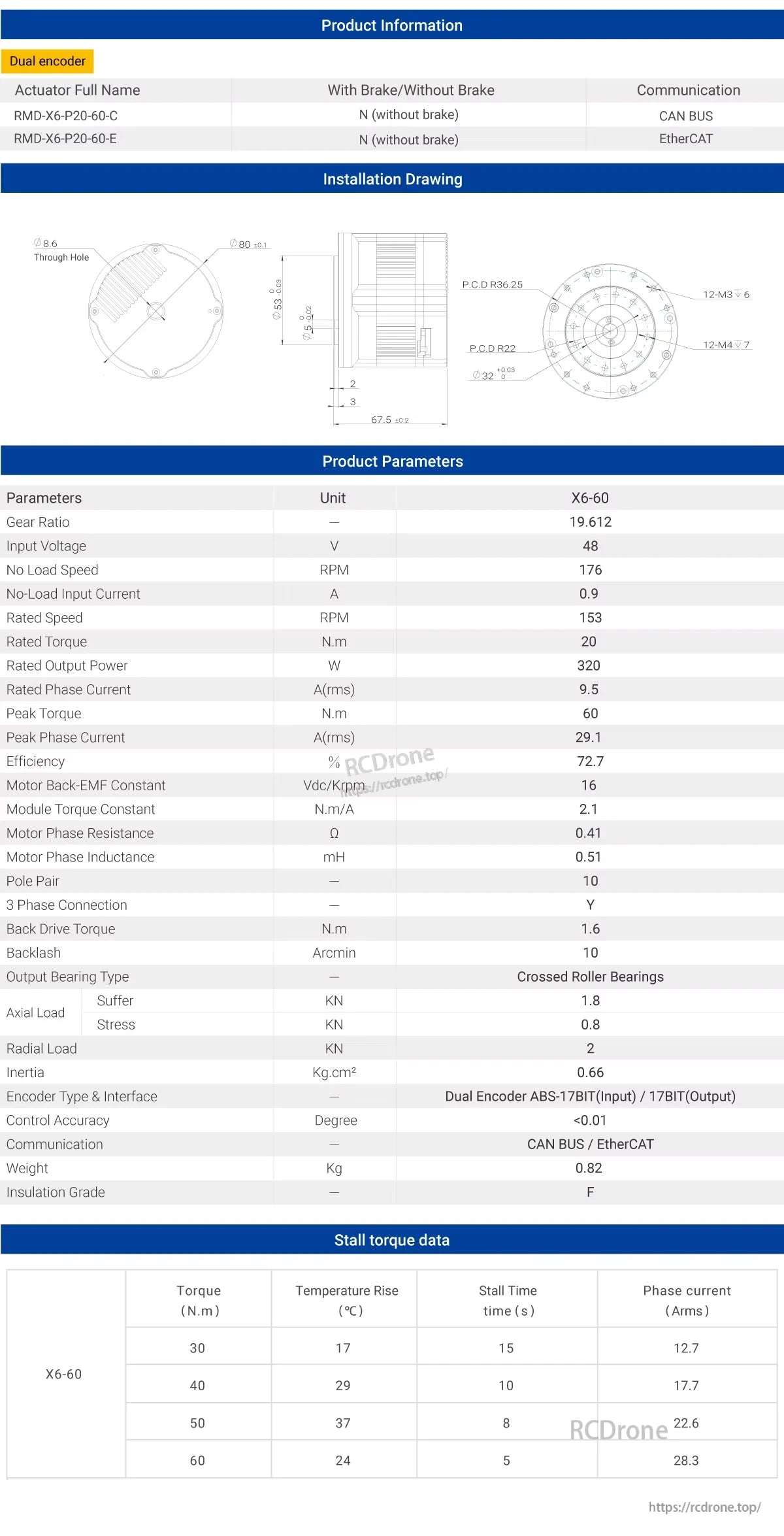
Specyfikacje techniczne
| Parametr | Wartość |
|---|---|
| Model | RMD-X6-P20-60-C |
| Napięcie wejściowe | 48V |
| Moc znamionowa | 320W |
| Moment obrotowy znamionowy | 20N·m |
| Moment obrotowy szczytowy | 60N·m |
| Prędkość znamionowa | 153RPM |
| Prędkość bez obciążenia | 176RPM |
| Prąd znamionowy | 9.5A (RMS) |
| Prąd bez obciążenia | 0.9A |
| Prąd szczytowy | 29.1A (RMS) |
| Przełożenie | 19.612:1 |
| Pary biegunów | 10 |
| Rozdzielczość enkodera | Wejście: 17bit / Wyjście: 17bit |
| Waga | 0.82kg |
Opis interfejsu
Porty zasilania i komunikacji
| Port | Opis |
|---|---|
| EtherCAT_OUT | Port wyjściowy EtherCAT |
| EtherCAT_IN | Port wejściowy EtherCAT |
| CAN_L | Terminal sygnałowy CAN Low |
| CAN_H | Terminal sygnałowy CAN High |
| GND | Ujemne zasilanie |
| VCC | dodatnie zasilanie |
Terminale sygnałowe
R+/R-: Dane zwrotne z modułu do stacji nadrzędnej
-
T+/T-: Sygnaly poleceń sterujących z stacji nadrzędnej do modułu
Wymiary i struktura
-
Średnica: 120mm
-
Wysokość: 80mm
-
Otwory montażowe: P.C.D R26.25 i R22 z 12 × otworami gwintowanymi M4
-
Wał wyjściowy: Standardowy interfejs flanszy do elastycznego sprzężenia z komponentami zewnętrznymi
Informacje o pakowaniu
| Elementy w zestawie | Ilość |
|---|---|
| Zasilanie + kabel komunikacyjny CAN BUS | 2 szt |
| Kabel komunikacyjny EtherCAT | 2 szt |
| Opór końcowy 120Ω | 1 szt |
| Moduł komunikacyjny CAN BUS (adapter USB-CAN) | 1 szt |
Wymiary opakowania:
-
Długość × Szerokość × Wysokość: 120mm × 120mm × 80mm
Akcesoria i Połączenia
Zasilacz + Kabel CAN BUS
-
Złącze: XT30 (2+2)
-
Biała Linia: sygnał CAN_L
-
Żółta Linia: sygnał CAN_H
-
Czerwona Linia: dodatnie zasilanie VCC
-
Czarna Linia: ujemne zasilanie GND
Kabel komunikacyjny EtherCAT
-
Złącze: SH1.0mm (4-pin)
-
Linia T: transmisja sygnału komunikacyjnego EtherCAT
-
Linia R: odbiór sygnału komunikacyjnego EtherCAT
Moduł CAN BUS
-
Terminale: CAN_L, CAN_H, CAN_G oraz przełączalna terminacja 120Ω (WŁ./WYŁ.)
-
Adapter USB-CAN dostarczany bezpłatnie z każdym zamówieniem
Zastosowania
-
Stawy Robotów Współpracujących
-
Roboty Serwisowe i Humanoidalne
-
Systemy Kierowania lub Napędu Robotów Mobilnych
-
Przemysłowe Ramiona Robotyczne
-
Systemy Kontroli Ruchu o Wysokiej Precyzji
Platformy badawcze i edukacyjne
Podsumowanie
Siłownik MyActuator RMD-X6-60 integruje wysokoprecyzyjne podwójne enkodery, protokoły komunikacyjne EtherCAT i CAN BUS, wysoką gęstość momentu obrotowego oraz kompaktową formę, co czyni go wszechstronnym i niezawodnym rozwiązaniem dla robotyki i automatyzacji przemysłowej. Dzięki mocy 320W, szczytowemu momentowi obrotowemu 60N·m oraz 17-bitowej wysokiej rozdzielczości sprzężenia zwrotnego, ten siłownik serwo zapewnia wyjątkową wydajność i precyzję kontroli dla zaawansowanych projektów robotycznych.
Szczegóły
Siłownik serwo RMD-X6-60 ma podwójny enkoder, przełożenie 19.612, zasilanie 48V, moc 320W, komunikację CAN BUS/EtherCAT, 20 N.mnominalnego momentu obrotowego, 60 N.mszczytowego momentu obrotowego i waży 0.82 kg.
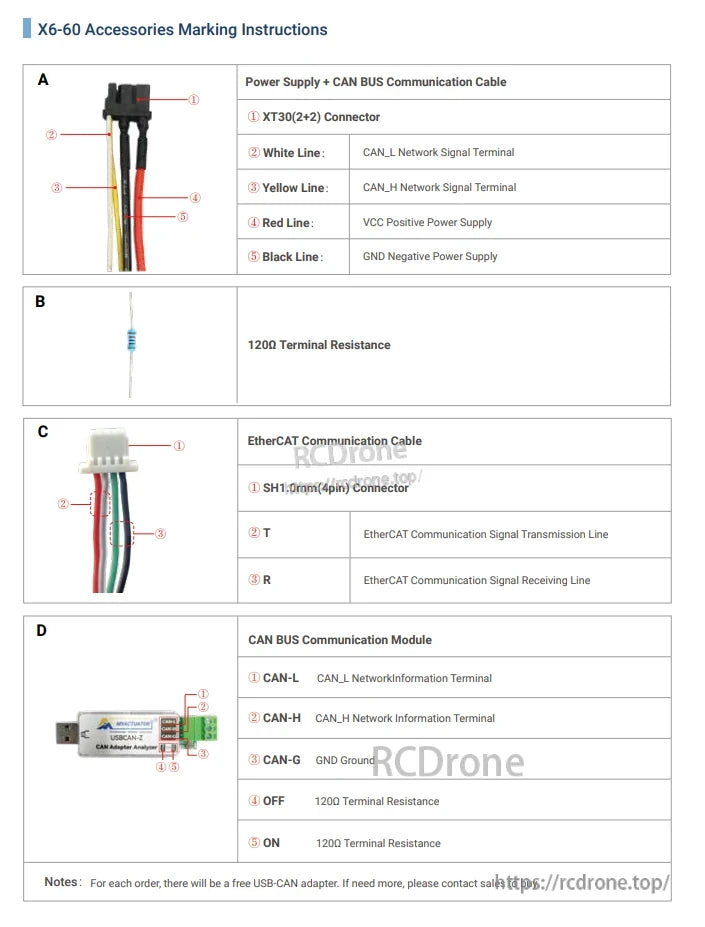
Akcesoria X6-60 obejmują kabel zasilający i CAN BUS z przewodami w kolorze, opór końcowy 120Ω, kabel EtherCAT z liniami T/R oraz moduł CAN BUS z zaciskami dla CAN-L, CAN-H, GND oraz ustawieniami oporu końcowego. Do każdego zamówienia dołączony jest bezpłatny adapter USB-CAN.

Siłownik serwo RMD-X6-P20-60-C z EtherCAT+CAN BUS, 19.612 ratio, 48V input, 153RPM rated speed, 20Nm torque, 320W output, dual encoder, high-speed MCU and CAN chip, crossed roller bearing.
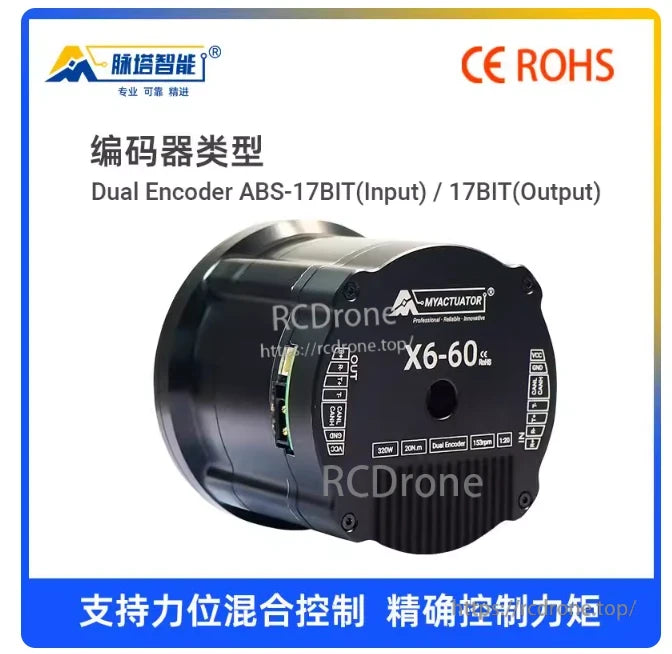
Dual Encoder ABS-17BIT Wejście/Wyjście, X6-60 Siłownik Serwo, 300W, 20N.m, 128rpm, wspiera hybrydowe sterowanie siłą i pozycją, precyzyjne sterowanie momentem obrotowym.
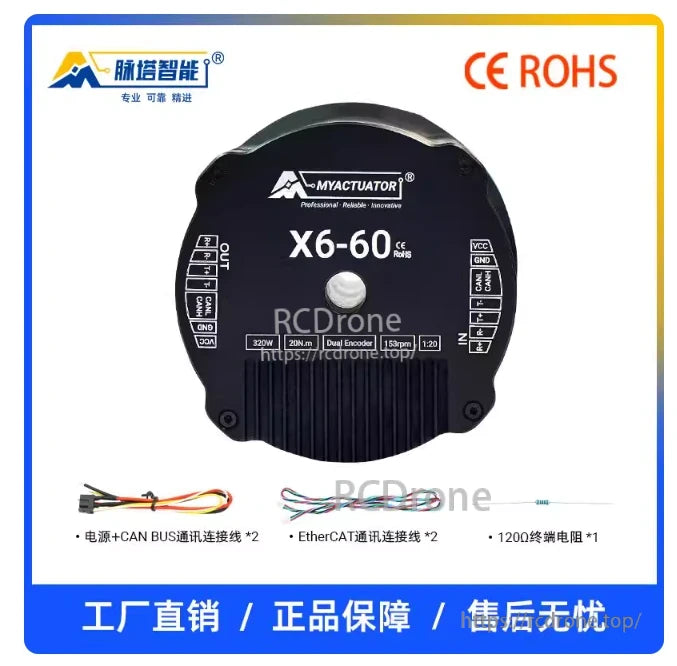
X6-60 siłownik serwo, 320W, 20N.m, dual encoder, 158rpm, 1:20 ratio, z kablami CAN BUS i EtherCAT, terminator 120Ω, certyfikat CE ROHS.

Opakowanie siłownika serwo RMD-X6-60 z okablowaniem CAN BUS, kablem zasilającym i rezystorem terminacyjnym 1200.
Related Collections





