




Serwomotor MyActuator RMD-X8-120 48V 574W 110N·m, podwójny enkoder, EtherCAT, CAN BUS do robotów i ramion robotycznych
Serwomotor MyActuator RMD-X8-120 48V 574W 110N·m, podwójny enkoder, EtherCAT, CAN BUS do robotów i ramion robotycznych
MyActuator
Nie można załadować gotowości do odbioru
Przegląd
Serwomotor MyActuator RMD-X8-120 integruje przekładnię planetarną, podwójne enkodery 17-bitowe oraz wysokowydajny kontroler napędu, oferując potężny moment obrotowy i precyzyjne sterowanie ruchem. Z mocą nominalną 574W, momentem obrotowym 43N·m oraz maksymalnym momentem obrotowym do 110N·m, jest idealny do robotów humanoidalnych, ramion robotycznych, robotów czworonożnych oraz innych inteligentnych systemów automatyzacji. Obsługując protokół CAN BUS i EtherCAT, zapewnia bezproblemową integrację z nowoczesnymi platformami robotycznymi.
Kluczowe specyfikacje
| Parametr | Wartość |
|---|---|
| Model | RMD-X8-P20-120-C |
| Przełożenie | 19.612:1 |
| Napięcie | 48V |
| Obroty na biegu jałowym | 158 RPM |
| Obroty znamionowe | 127 RPM |
| Prąd na biegu jałowym | 1.6 A |
| Moment obrotowy znamionowy | 43 N·m |
| Moment obrotowy szczytowy | 110 N·m |
| Prąd fazowy szczytowy | 43.8 A (rms) |
| Moc znamionowa | 574 W |
| Waga | 1.4 kg |
| Wymiary | Φ96 mm × 76 mm wysokość |
| Typ enkodera | Podwójny enkoder ABS-17BIT (wejście) / 17BIT (wyjście) |
| Komunikacja | CAN BUS / EtherCAT |
Interfejs i łączność
-
EtherCAT IN/OUT dla szybkiej, rzeczywistej komunikacji
-
CAN_H & CAN_L terminale do sieci CAN BUS
-
VCC/GND do zasilania (48V)
-
Kanały sygnałowe (T-/T+/R-/R+) do informacji zwrotnej o poleceniach i statusie
Dołączone akcesoria
-
2× Zasilacz + kable komunikacyjne CAN BUS
2× kable komunikacyjne EtherCAT
-
1× rezystor końcowy 120Ω
-
1× moduł komunikacyjny CAN BUS z adapterem USB-CAN
Kluczowe cechy
-
Wysoka precyzja sterowania – Podwójne 17-bitowe enkodery absolutne umożliwiają dokładne sterowanie pozycją, prędkością i momentem obrotowym.
-
Wysoki moment obrotowy – Moment nominalny 43N·m, szczytowy 110N·m dla wymagających obciążeń.
-
Zintegrowana konstrukcja – Kompaktowa struktura z przekładnią planetarną i modułem napędowym dla łatwej instalacji.
-
Wsparcie dla dwóch protokołów – Kompatybilne z CAN BUS i EtherCAT dla elastycznej integracji.
-
Solidna konstrukcja – Łożyska krzyżowe o wysokiej wytrzymałości zapewniają trwałość przy dużych obciążeniach.
Zastosowania
-
Stawy robota humanoidalnego
-
Współpracujące ramiona robotyczne
-
Roboty czworonożne i dwunożne
-
Systemy egzoszkieletowe
-
Autonomiczne platformy mobilne
-
Wysokoprecyzyjna automatyzacja przemysłowa
Szczegóły

Serwoaktuator M-RMD X8-120 oferuje podwójny enkoder, zasilanie 48V, 43 N.m momentu obrotowego, moc 574W, CAN BUS/EtherCAT, przełożenie 19.612, 10 par biegunów, wagę 1.40 kg oraz szczegóły momentu obrotowego przy zablokowaniu.
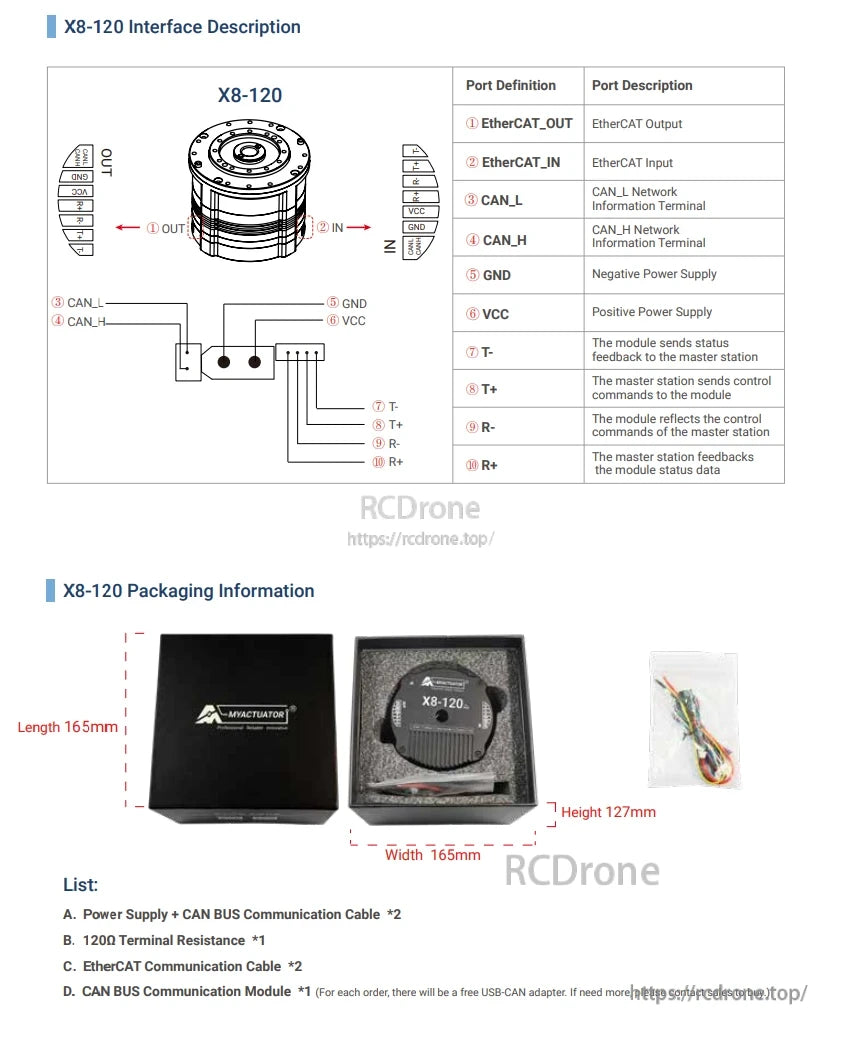
Interfejs serwo X8-120 obsługuje EtherCAT i CAN bus, zawiera złącza zasilania, sygnału oraz adapter USB-CAN. Opakowanie: 165x165x127mm. Zawiera zasilacz, kable, opór końcowy oraz moduł komunikacyjny.

Akcesoria MyActuator X8-120 obejmują zasilacz z kablem CAN BUS, opór końcowy 120Ω, kabel EtherCAT oraz moduł CAN BUS. Szczegóły obejmują złącza, funkcje przewodów oraz terminale do komunikacji i zasilania. W każdej zamówieniu dołączony jest bezpłatny adapter USB-CAN.

MyActuator serwomotor X8-120, 574W, 45N.m, podwójny enkoder, 127rpm, stosunek 1:20. Zawiera kable zasilające + CAN BUS, kable EtherCAT oraz terminator 120Ω. Certyfikat CE ROHS.

Serwo z podwójnym enkoderem EtherCAT + CAN BUS, model RMD-X8-P20-120-C, 48V, stosunek redukcji 19.612, 127RPM, moment obrotowy 43N.m, moc 574W, waga 1.4kg, z wysokowydajnym MCU, chipem CAN oraz łożyskami krzyżowymi.

Podwójny enkoder ABS-17BIT Wejście/Wyjście, X8-120CL, wspiera hybrydowe sterowanie siłą i pozycją, precyzyjne sterowanie momentem obrotowym.

Serwo MYACTUATOR X8-120 z zasilaniem, kablami CAN BUS, EtherCAT oraz terminatorem 120Ω. Opakowanie zawiera po dwa kable zasilające i komunikacyjne.

Zintegrowany moduł przekładni planetarnej, podwójny enkoder, komunikacja EtherCAT/CAN, moment obrotowy szczytowy 120N.m, wymiary 96mm×76mm, do stawów robotycznych.
Related Collections




