





OYMotion ROH-AP001 Zręczna Ręka Robota, 6 DOF, 11 przegubów, czujniki siły, UART/RS485/CAN, sterowanie PID, 0,7 s
OYMotion ROH-AP001 Zręczna Ręka Robota, 6 DOF, 11 przegubów, czujniki siły, UART/RS485/CAN, sterowanie PID, 0,7 s
OYMotion
Nie można załadować gotowości do odbioru
Przegląd
OYMotion ROH-AP001 Zwinna Ręka to Ręka Robota z 11 ruchomymi stawami i 6 wbudowanymi sterownikami silników, zapewniającymi 6 aktywnych stopni swobody. Wbudowany algorytm sterowania silnikiem PID umożliwia dokładne, powtarzalne chwytanie i manipulację obiektami. Każdy palec integruje czujnik siły do monitorowania w czasie rzeczywistym i sterowania w pętli zamkniętej siłą chwytu. Interfejsy fizyczne obejmują UART, RS485 lub CAN FD, z obsługą protokołu szeregowego SerialCtrl, ModBus-RTU i protokołu CAN. Platformy ROS/ROS2 są wspierane dla rozwoju wtórnego za pośrednictwem SDK (wymagana umowa licencyjna).
Kluczowe cechy
- 6 aktywnych DOF i 11 stawów; niezależnie napędzane palce dla naturalnego chwytu.
- Wbudowane sterowniki silników i kontrola PID; całe napędzanie zintegrowane w ręce.
- Czujniki siły na każdym palcu z informacją zwrotną dotykową i kontrolą siły w czasie rzeczywistym.
- Obracanie kciuka z napędem oraz składana konstrukcja palców.
- Obsługa ekranu dotykowego wspierana na końcówkach palców.
- Szybki ruch: 0,7 s pełne zgięcie/rozciągnięcie i 0,7 s pełne obrócenie kciuka.
- Ładowność: do 30 kg obciążenia pasywnego dla czterech palców (zgiętych), 10 kg na palec (zgięty), 8 kg na palec (rozciągnięty).
- Rozmiar i proporcje przypominające ludzkie; miękkie poduszki palców i rękawica silikonowa; dostosowany projekt nadgarstka; sygnalizator wiadomości.
- Interfejsy i protokoły: UART/RS485/CAN z SerialCtrl i ModBus-RTU; CAN przy 1M baud.
- Materiały: stop aluminium, stop cynku, stal nierdzewna, silikon, plastik.
Specyfikacje
| Aktywne DOF | 6 |
| Ruchome stawy (artykulacje) | 11 |
| Wysokość pionowa od końcówki palca środkowego do nadgarstka | 183 mm |
| Wysokość pionowa od końcówki kciuka do nadgarstka | 95 mm |
| Długość kciuka | 111 mm |
| Maksymalna szerokość dłoni | 82 mm |
| Średnica nadgarstka | 49 mm |
| Maksymalny kąt otwarcia i zamknięcia po stronie kciuka | 0~31 ° |
| Maksymalny kąt otwarcia i zamknięcia kciuka do dłoni | 0~50 ° |
| Kąt rotacji bocznej kciuka | 0~90 ° |
| Czas zginania/rozciągania na pełnym zakresie przy maksymalnej prędkości | 0.7 sekund |
| Czas obrotu kciuka na pełnym zakresie przy maksymalnej prędkości | 0.7 sekundy |
| Aktywna siła każdego palca w stanie rozciągniętym | ≥0.5 Kgf |
| Aktywna siła każdego palca w stanie zgiętym | ≥1.0 Kgf |
| Maksymalna aktywna siła końcówki kciuka | ≥1.0 Kgf |
| Maksymalne obciążenie pasywne dla czterech palców w stanie zgiętym | 30 Kg |
| Maksymalne obciążenie pasywne dla każdego palca w stanie zgiętym | 10 Kg |
| Maksymalne obciążenie pasywne dla każdego palca w stanie wyprostowanym | 8 Kg |
| Funkcja dotykowa palca | Obsługiwane |
| Informacja zwrotna siły palca | Obsługiwane |
| Temperatura robocza środowiska | -10 °C ~ +40 °C |
| Wilgotność robocza środowiska | Maksymalna wilgotność względna 85% |
| Czas życia projektu | 3 lata |
| Waga (w tym nadgarstek) | 640 g ± 5 g |
| Interfejs komunikacyjny | UART/RS485/CAN |
| Prędkość transmisji | UART: 9600/19200/38400/57600/115200/230400/460800/921600; RS485: 9600/19200/38400/57600/115200/230400/460800; CAN: 1M |
| Obsługiwany protokół | UART: SerialCtrl, ModBus-RTU; RS485: SerialCtrl, ModBus-RTU; CAN: SerialCtrl |
| Materiały | Stop aluminium; stop cynku; stal nierdzewna; silikon; plastik |
Zastosowania
- Robotyczne końcówki i roboty humanoidalne.
- Sprzęt edukacyjny i badawczy.
- Bioniczne protezy.
- Automatyzacja przemysłowa i systemy AGV.
W celu uzyskania pomocy w zamówieniach, wskazówek dotyczących integracji lub wsparcia technicznego, prosimy o kontakt [email protected] or odwiedź https://rcdrone.top/.
Podręczniki
Szczegóły

ROHand zapewnia dokładność pozycjonowania ±1mm dzięki wbudowanej kontroli silnika PID i oferuje sześć aktywnych stopni swobody, aby symulować ruchy ludzkiej ręki, takie jak chwytanie i trzymanie. Idealny do robotów humanoidalnych, końcówek roboczych, systemów inspekcji, inteligentnych bionicznych protez oraz zastosowań edukacyjnych lub badawczych, jego konstrukcja wspiera wszechstronną, precyzyjną manipulację w złożonych zadaniach.
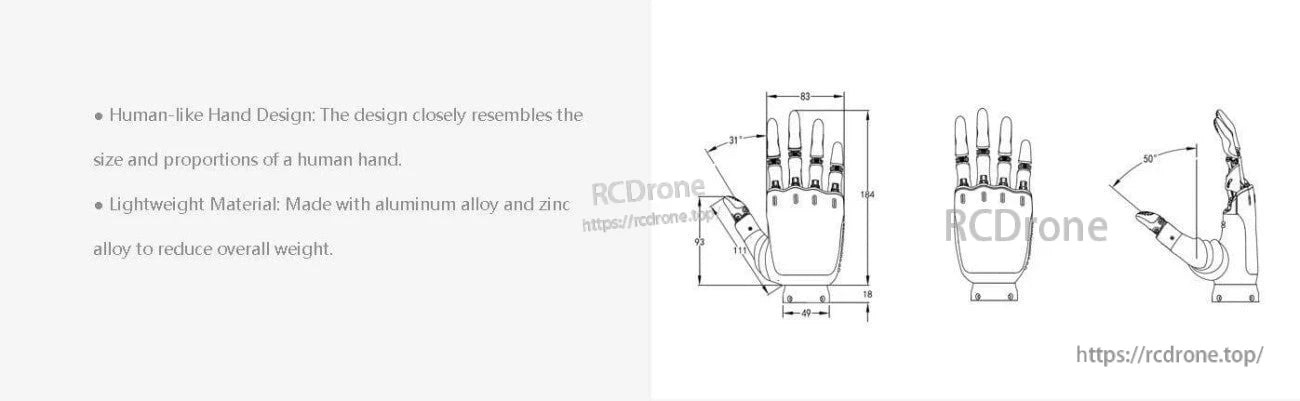
Ludzka, zręczna ręka robota o lekkiej konstrukcji z aluminium i cynku oraz precyzyjnych wymiarach.

Ręka robota OYMotion ROH-AP001 naśladuje proporcje ludzkie, wyposażona w ruchome palce i czujniki do precyzyjnej, w pełni wymiarowej manipulacji robotycznej.
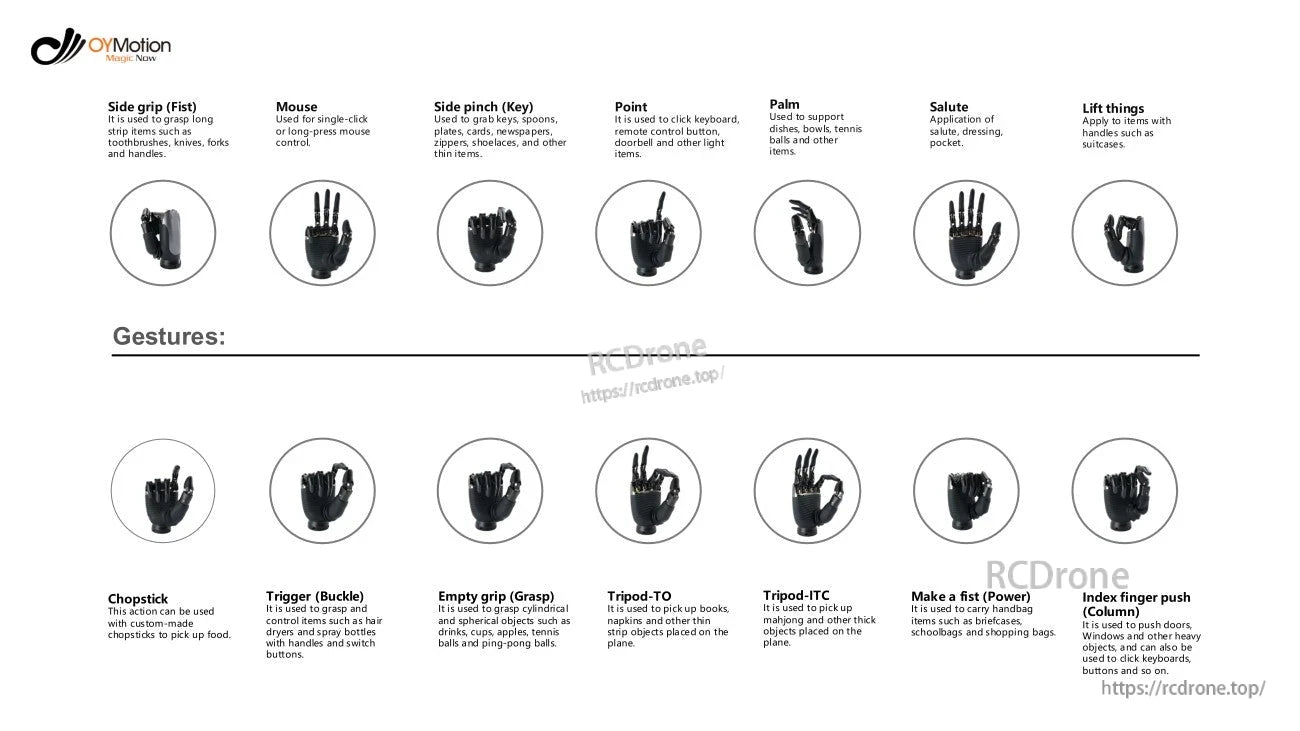
Ręka robota OYMotion wykonuje 14 precyzyjnych gestów—takich jak chwytanie, wskazywanie i podnoszenie—aby radzić sobie z codziennymi zadaniami, takimi jak używanie pałeczek, noszenie torebek czy klikanie w klawiatury, demonstrując zaawansowaną zręczność i praktyczną użyteczność.

Ręka robota OYMotion oferuje motorowe palce, składany design, miękkie podkładki, zasilany kciuk, silikonową rękawicę, wbudowaną aktywację, sygnalizator, niestandardowy nadgarstek i złącze RS485 dla zręcznego, naturalnego chwytu.
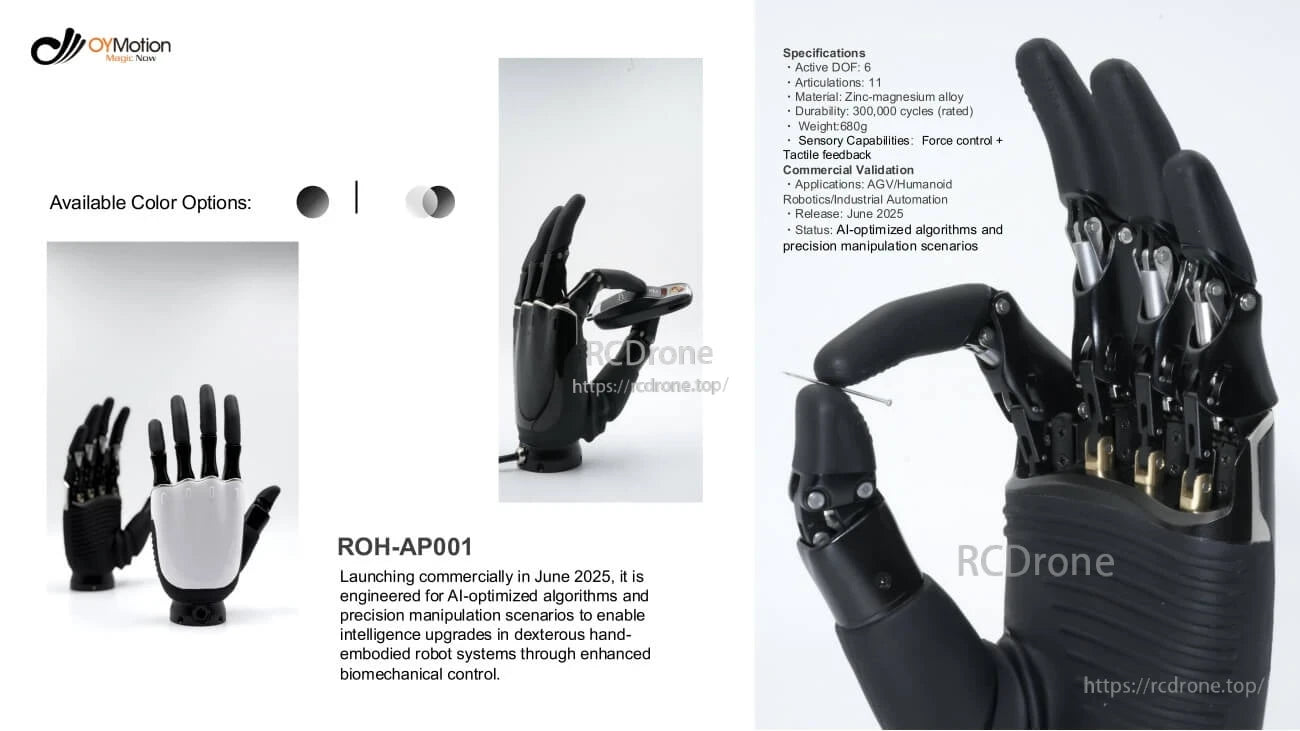
Ręka robota OYMotion ROH-AP001 ma 6 aktywnych DOF, 11 stawów, konstrukcję ze stopu cynkowo-magnezowego, trwałość 300k cykli, waży 680g i oferuje sprzężenie zwrotne siły/ dotyku dla zadań AI i precyzyjnych—premiera w czerwcu 2025.

Robotyczna ręka OYMotion ROH-AP001 ma zmotoryzowane palce, zasilany kciuk, silikonową rękawicę i wbudowaną aktywację. Wykonana z aluminium, cynku, stali, silikonu i plastiku, zawiera sygnalizator, niestandardowy nadgarstek, protokół RS485, składany design i sprężyny ciśnieniowe.
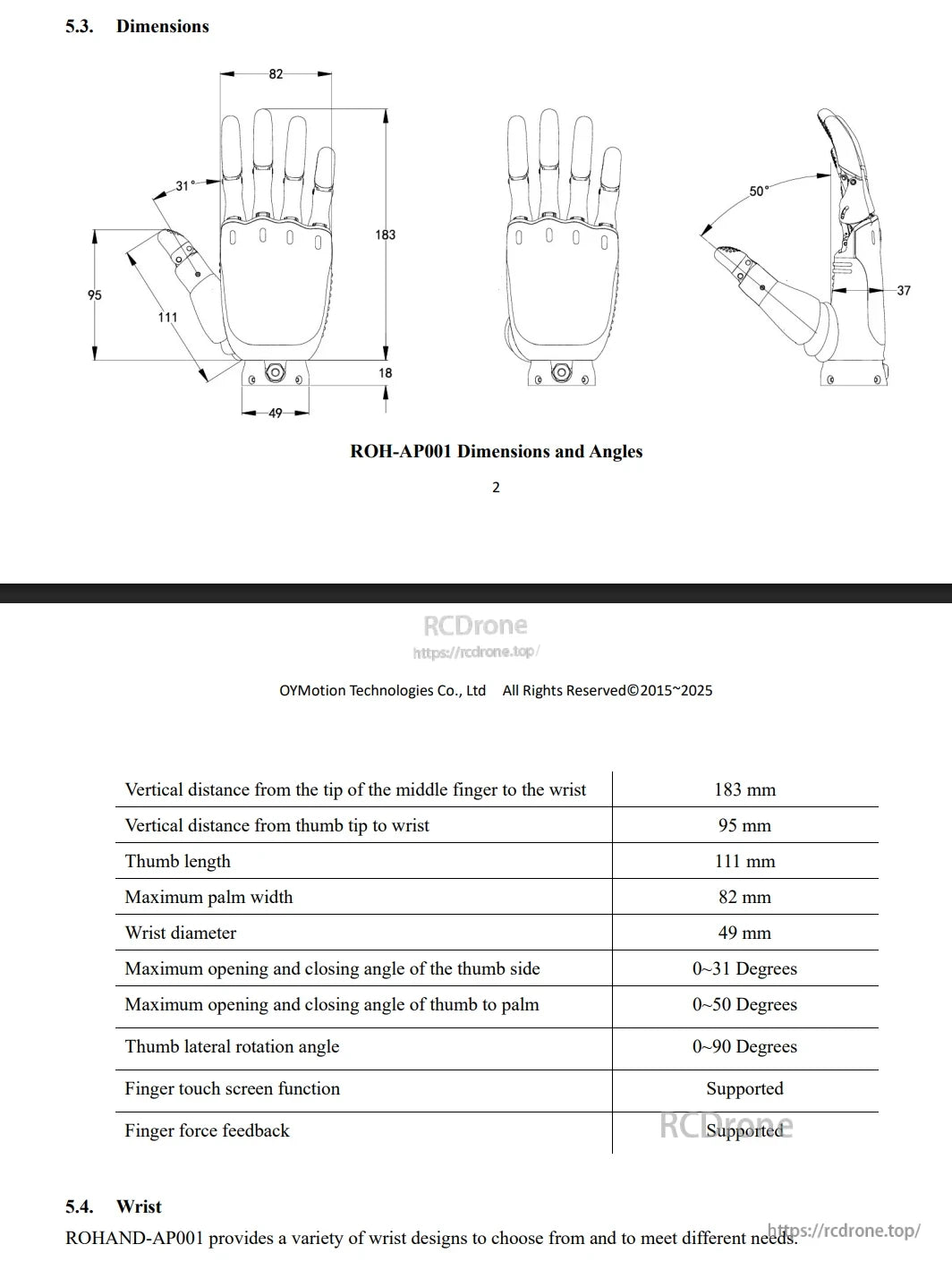
Wymiary robotycznej ręki ROH-AP001 obejmują wysokość od palca do nadgarstka 183 mm, od kciuka do nadgarstka 95 mm, długość kciuka 111 mm, szerokość dłoni 82 mm, średnicę nadgarstka 49 mm. Kąty kciuka: 0-31° na bok, 0-50° do dłoni, 0-90° rotacja. Obsługuje ekran dotykowy i sprzężenie zwrotne siłowe.
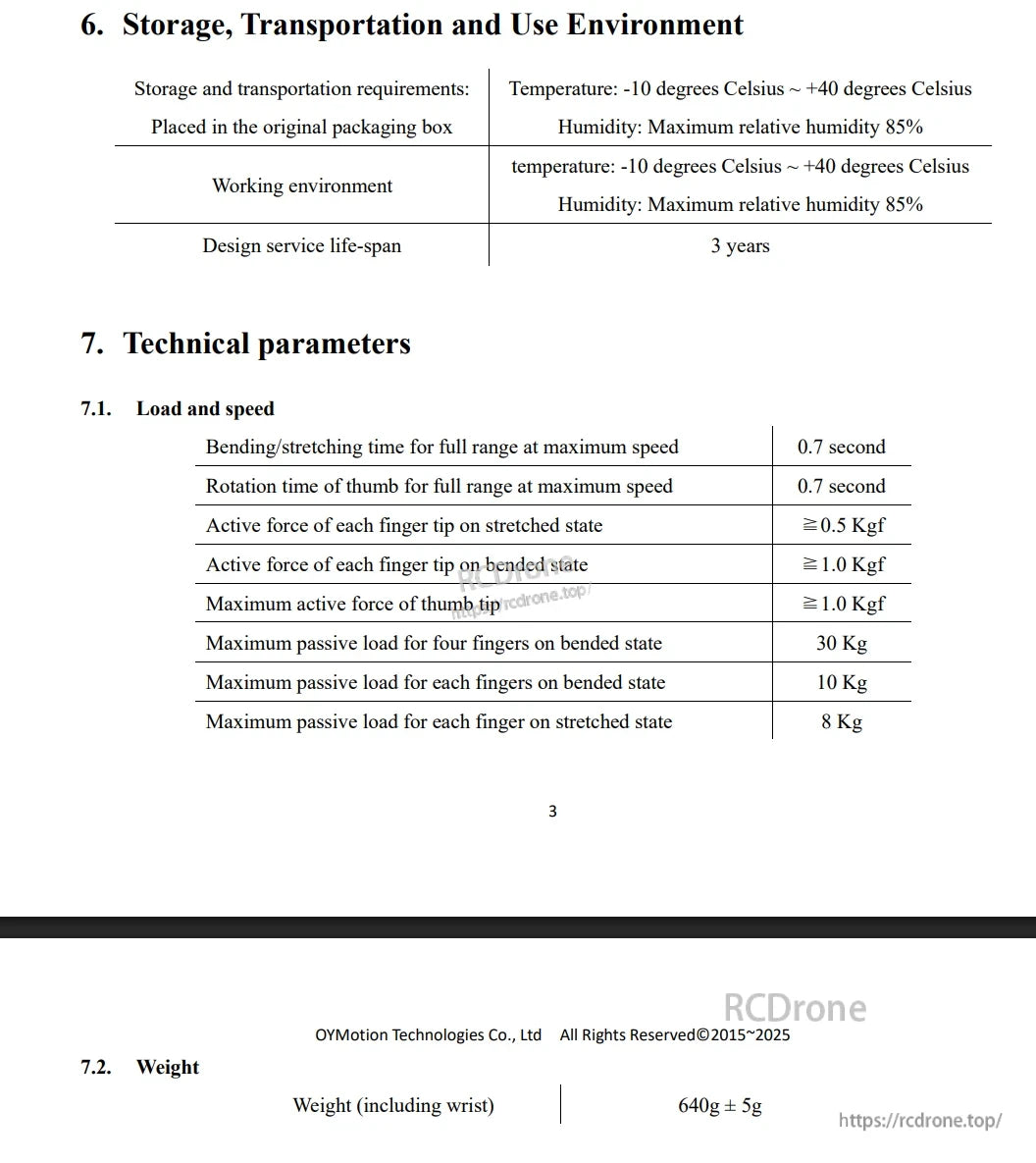
Robotyczna ręka OYMotion ROH-AP001 działa w temperaturze od -10°C do +40°C, maksymalna wilgotność 85%. Czas życia projektu: 3 lata. Waga: 640g ±5g. Siła aktywna palca ≥0.5–1.0 Kgf; obciążenie pasywne do 30 kg dla czterech palców.
Related Collections





