SPECYFIKACJA 32-bitowego kontrolera lotu Pixhawk 2.4.8 PX4 PIX
Zastosowanie: Pojazdy i zabawki zdalnie sterowane
Uaktualnij części/akcesoria: Rama
Materiały narzędziowe: szlifowane
Parametry techniczne: Wartość 3
Urządzenia peryferyjne/urządzenia do zdalnego sterowania: Pilot zdalnego sterowania
Zalecany wiek: 12+lat,14+lat
Części i akcesoria do zdalnie sterowanych pojazdów: Kontrolery prędkości
Pochodzenie: Chiny kontynentalne
Numer modelu: Pixhawk 2.4.8
Materiał: Metal
Atrybuty napędu na cztery koła: Silniki
Dla typu pojazdu: Samoloty
Nazwa marki: Readytosky
ReadyToSky to profesjonalny dostawca akcesoriów do modułów FPV RC. Jeśli chcesz dowiedzieć się więcej na temat opcji zakupów hurtowych lub hurtowych, skontaktuj się z nami.
Cechy:
Pixhawk 2.4.8 obsługuje najnowsze oficjalne oprogramowanie sprzętowe ardupilot i oprogramowanie sprzętowe PX4.
1. Zaawansowane 32-bitowe, wysokowydajne procesory ARM CortexM4 (2 MB pamięci flash) mogą obsługiwać system operacyjny czasu rzeczywistego NuttX RTOS;
2. 14 PWM / wyjście serwo;
3. Interfejs magistrali (UART, I2C, SPI, CAN);
4. Zintegrowane zasilanie rezerwowe i kontroler rezerwowy ulegają awarii, awaria głównego kontrolera do sterowania rezerwowego jest bezpieczna;
5. Zapewnij tryby automatyczny i ręczny;
6. Zapewnij nadmiarowe zasilanie wejściowe i przełączanie awaryjne;
7. Wielokolorowe diody LED;
8. Zapewnij wielotonowy interfejs brzęczyka
9. Zapis danych lotu na karcie Micro SD;
Dane techniczne:
Interfejs
UART 1, 2 kompatybilny z wysokim napięciem 1,5 ze sprzętową kontrolą przepływu
2. 2 MOŻE
3.Spektrum DSM / DSM2 / DSM-X wejście kompatybilne z odbiornikiem satelitarnym
4. Wejścia i wyjścia kompatybilne z Futaba SBUS
Wejście sygnału 5.PPM
6.RSSI (PWM lub napięcie) Wejście
7.I2C
8.SPI
Wejście prądu stałego 9,3,3 i 6,6 VA
10. Zewnętrzny interfejs MICRO USB
Wyświetlacz OLED Pixhawk OSD dla Pixhawk 2.4.8 PIX PX4 Sterowanie lotem Wyświetlacz lotu Stan lotu Podłączony do interfejsu I2C
Nadaje się do sterowania lotem Pixhawk itp. i służy do wyświetlania informacji o statusie statku powietrznego. Moduł ten jest podłączony do interfejsu I2C Pixhawk
Uwaga: Aby zaktualizować oprogramowanie wyświetlacza do wersji 3.5 lub nowszej, ustaw NTF_DISPLAY_TYPE na 1 w Massion Planner i uruchom ponownie Pixhawk.
JAK używać modułu WIFI w PIXHAWK?
1.Jak się połączyć?
użyj linii 6P, aby połączyć się z kontrolerem lotu Pixhawk.
Ze względu na różne oprogramowanie sprzętowe, niektóre oprogramowanie sprzętowe może używać dwóch portów, a niektóre oprogramowanie sprzętowe może korzystać tylko z jednego z portów. Znajdź więc jeden z dostępnych portów dla połączenia.
JEŚLI używasz oprogramowania sprzętowego PX4, możesz używać tylko TELEM1, nie możesz używać TELEM2.
W przypadku oprogramowania Ardupilot zaleca się użycie portu TELEM2. Lub znajdź jeden z dostępnych portów dla połączenia.
W przypadku oprogramowania układowego PX4 należy użyć portu TELEM1.
2.Jak używać?
Uwaga: podczas korzystania z połączenia telemetrii radiowej Wi-Fi należy użyć modułu zasilania 3DR lub 5V ESC do zasilania układu sterowania lotem. Nie można podłączyć USB, ponieważ priorytet USB jest wyższy niż Telemetria radiowa. Jeśli kabel USB jest podłączony, nie można go używać do radiowej transmisji telemetrycznej.
Nazwa hotspotu Wi-Fi to Dron, więc połącz się z tym hotspotem za pomocą telefonu lub komputera, hasło to 12345678.
Uwaga: niektóre urządzenia (na przykład niektóre systemy iOS iphone) nie mogą uzyskać adresu IP automatycznie, należy ustawić ręcznie.
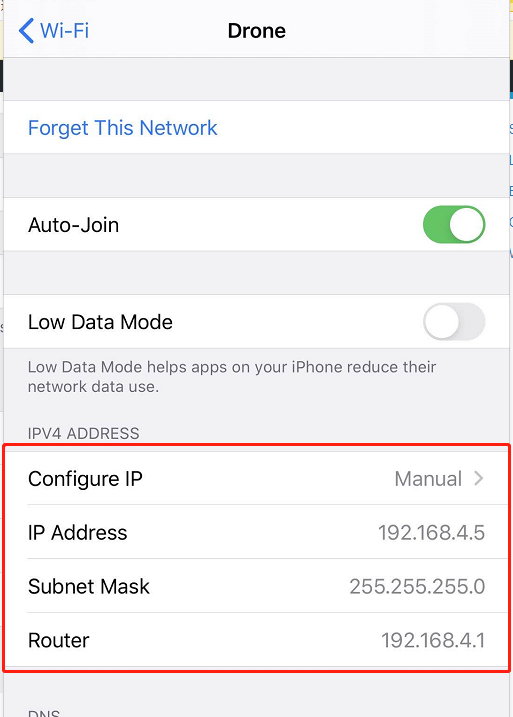
Ustaw opcję Konfiguruj adres IP jako ręczną. Ustaw adres IP jako „192.168.4.5” lub inny, ale nie można go ustawić jako „192.168.4.1″, ostatnia liczba nie może przekraczać 254. Ustaw maskę podsieci jako „255.255.255.0” (należy ustawić tę wartość, nie można innej). Ustaw router jako „192.168.4.1” (należy ustawić tę wartość, nie można ustawić innej)
Gdy Twoje urządzenie pomyślnie połączy się z tym hotspotem, możesz użyć przeglądarki, aby odwiedzić http://192.168.4.1 i zmodyfikować parametr.
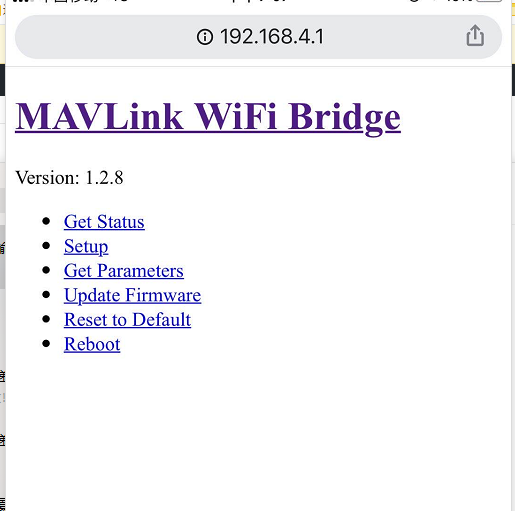
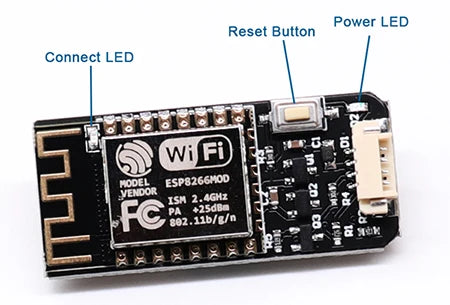
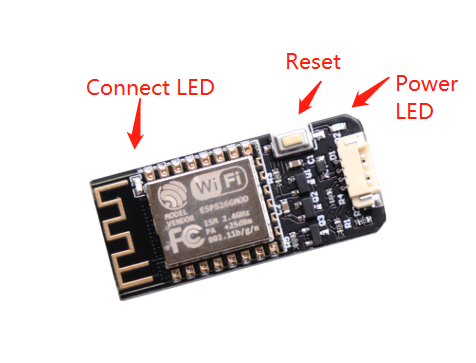
Uwaga, przycisk jest przyciskiem resetowania, a nie przyciskiem ponownego uruchamiania. Po naciśnięciu przycisku wszystkie parametry zostaną ustawione na wartości domyślne, jeśli zmodyfikujesz jakiś parametr.
Dioda zasilania: po włączeniu zasilania czerwona dioda LED świeci.
Dioda LED połączenia: po pomyślnym połączeniu z kontrolą naziemną (na przykład Mission Planner lub Qgroundcontrol), niebieska dioda LED miga. po rozłączeniu z kontrolą naziemną świeci się niebieska dioda LED.
1.Jak używać do planowania misji?
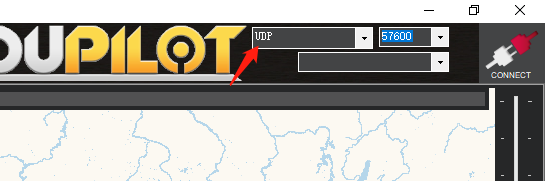
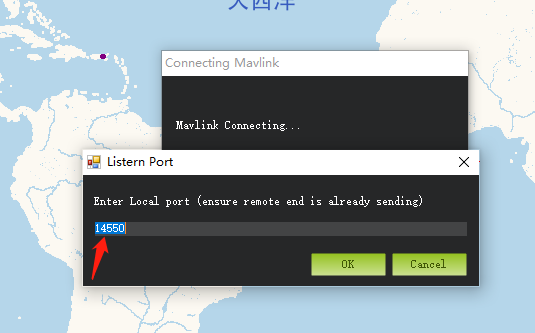
Najpierw pomyślnie podłącz swój komputer do drona z hotspotem. Wybierz UDP. Następnie kliknij przycisk „Połącz” i użyj portu 14550. Kliknij „OK”. Nie ma potrzeby wybierania szybkości transmisji. Domyślna szybkość transmisji modułu Wi-Fi to 57600. Ale 115200 lub inna może również działać.
2.Jak korzystać z telefonu
Dla Androida: pobierz qgroundcontrol (tylko dla pixhawk, nie dla APM)
stąd,http://qgroundcontrol.com/downloads/
Pobierz stąd DroidPlanner,https://github.com/DroidPlanner/Tower/releases
W przypadku iPhone'a (IOS): Wyszukaj qgroundcontrol w sklepie z aplikacjami.
qgroundcontrol (tylko dla pixhawk, nie dla APM) może połączyć się automatycznie, DroidPlanner powinien wybrać port „UDP” i „14550” przed połączeniem się z Groundcontrol.
WIFI V3.0 wykorzystuje 32-bitowy procesor, obsługuje TCP i UDP
Witryna WIFI V3.0 DroneBridge
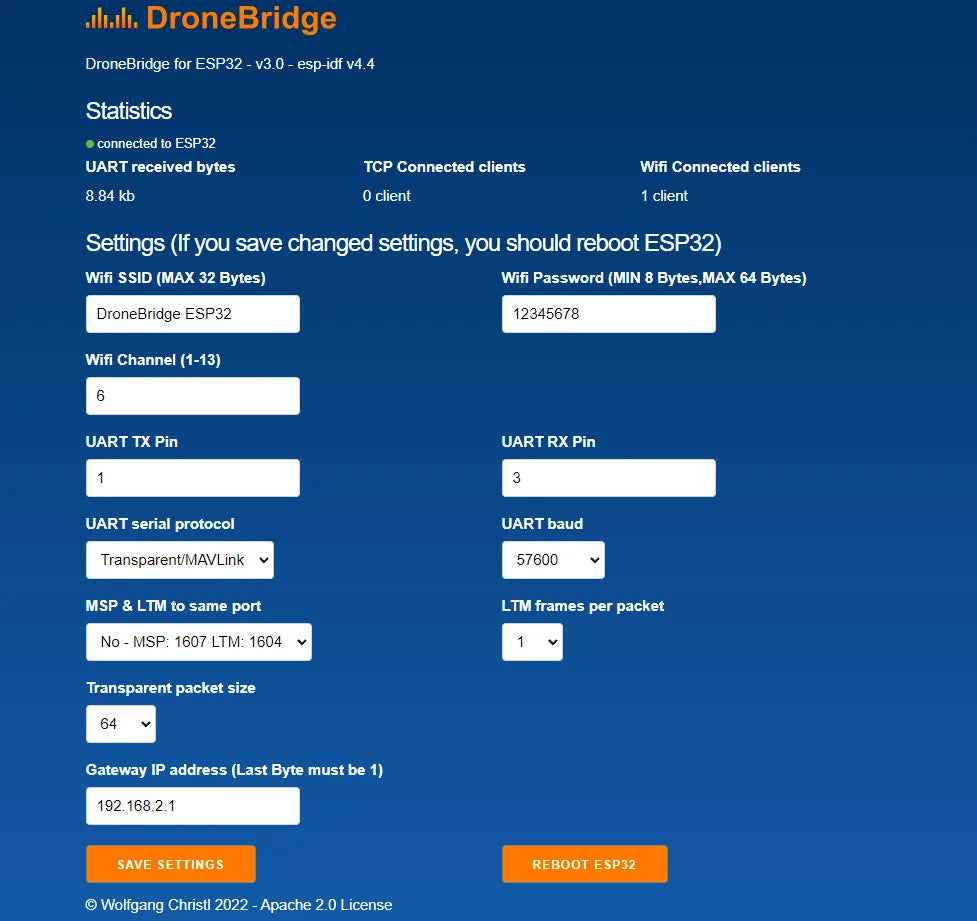
ulul; DroneBridge dla ESP32 v3.0 esp idf v4.4 Statystyka połączenia z ESP 32 UART odebranych bajtów TCP Połączeni klienci Hasło Wi-Fi (MIN 8 bajtów, MAX 64 bajty) jeśli zapiszesz zmienione ustawienia, powinieneś zrestartować ESP33 .
(wyślij jako swój wybór)

Pixhawk 2.4.Karta 8 FC + 4G TF + MBN Uchwyt GPS GPS + OSD + Moduł zasilania Amortyzator I2C PPM Przycisk bezpieczeństwa RGB Brzęczyk Wifi Przewody telemtryczne Ontk 'Moduł GPs PPM 1'

Pakiet zawiera: Pixhawk 2.4.8 kontroler lotu, karta 4G TF, amortyzator, moduł I2C, moduł PPM, moduł RGB, wyświetlacz OLED, przycisk bezpieczeństwa z brzęczykiem i przewody do wszystkich podzespołów.
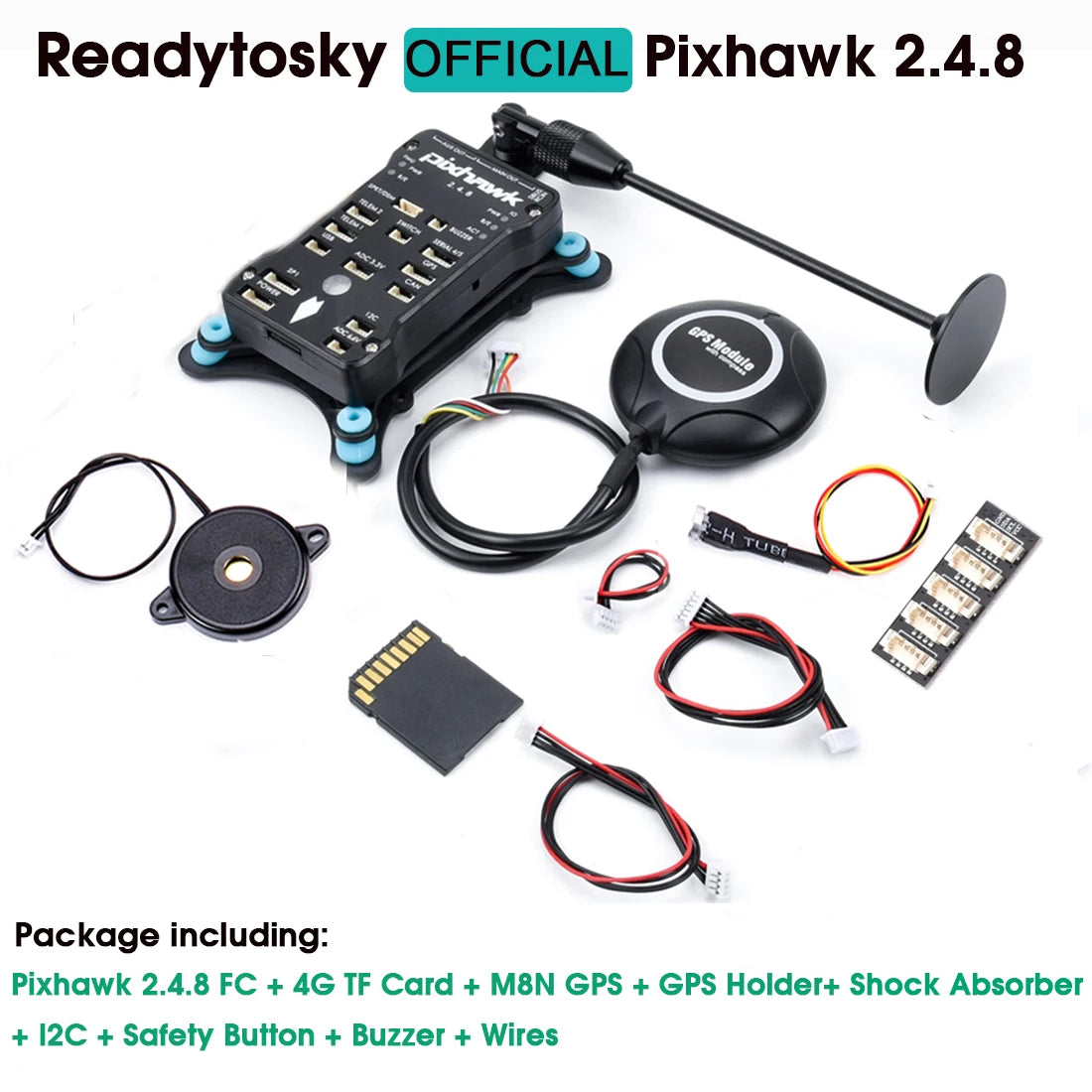
Pakiet zawiera: Pixhawk 2.4. 8, karta 4G TF, moduł GPS MBN, uchwyt GPS, amortyzator, przycisk bezpieczeństwa I2C, przewody brzęczyka i opcjonalny moduł telemetryczny do bezprzewodowej transmisji danych.

Pakiet zawiera: Pixhawk 2.4.8 kontroler lotu, karta 4G TF, amortyzator, wyświetlacz OLED, moduł I²C, moduł PPM (modulacja położenia impulsu), przycisk bezpieczeństwa z brzęczykiem i przewody.

To lot Pixhawk 2.4.8 kontroler jest wyposażony w kartę 4G TF, przycisk bezpieczeństwa, brzęczyk i przewody do wyjść pomocniczych. Posiada również moduł TELEM z dwoma wejściami zasilania, portem szeregowym i kanałami ADC (przetwornika analogowo-cyfrowego). Dodatkowo posiada funkcję GPS i do działania wymaga zasilania.

Wymagana jest kalibracja VCC, GPS i karty SD w trybie „stabilizowanym” przy napięciu akumulatora 11,32V. Dodatkowo nie ma dostępnych danych GPS. Wstępne uzbrojenie zostało zapisane i włączony jest EKF (rozszerzony filtr Kalmana).