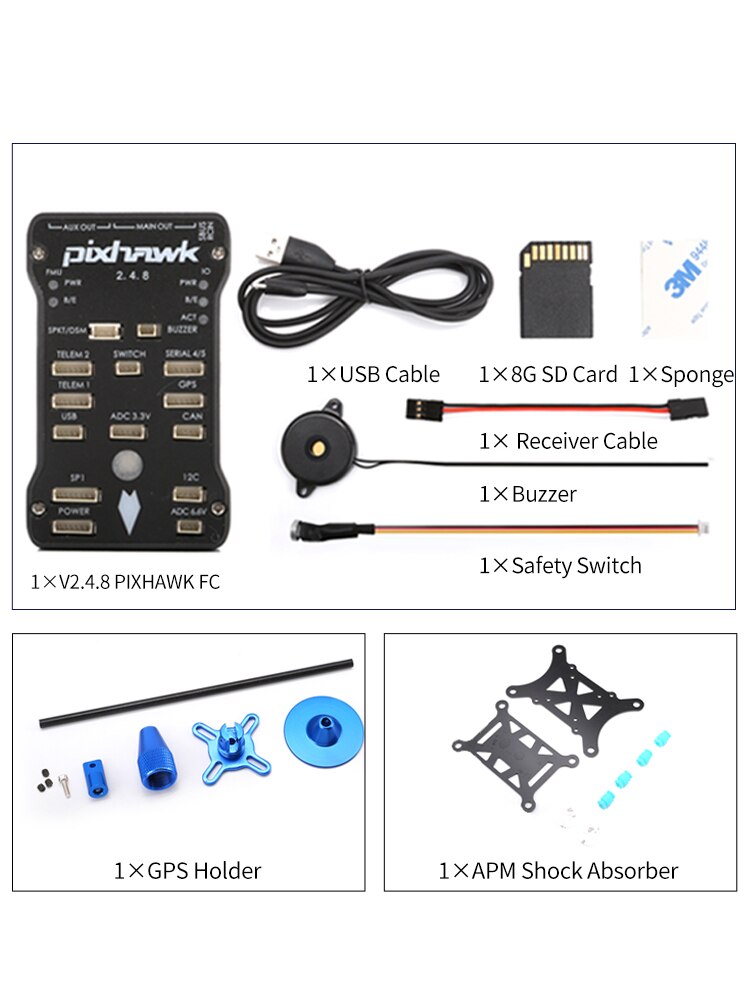
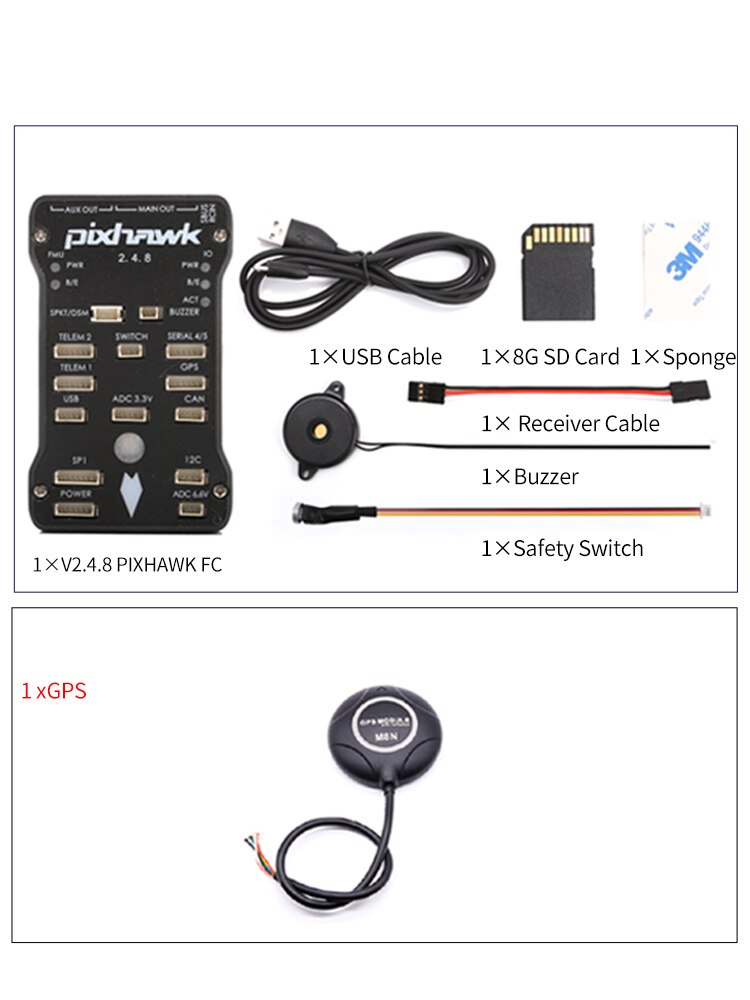
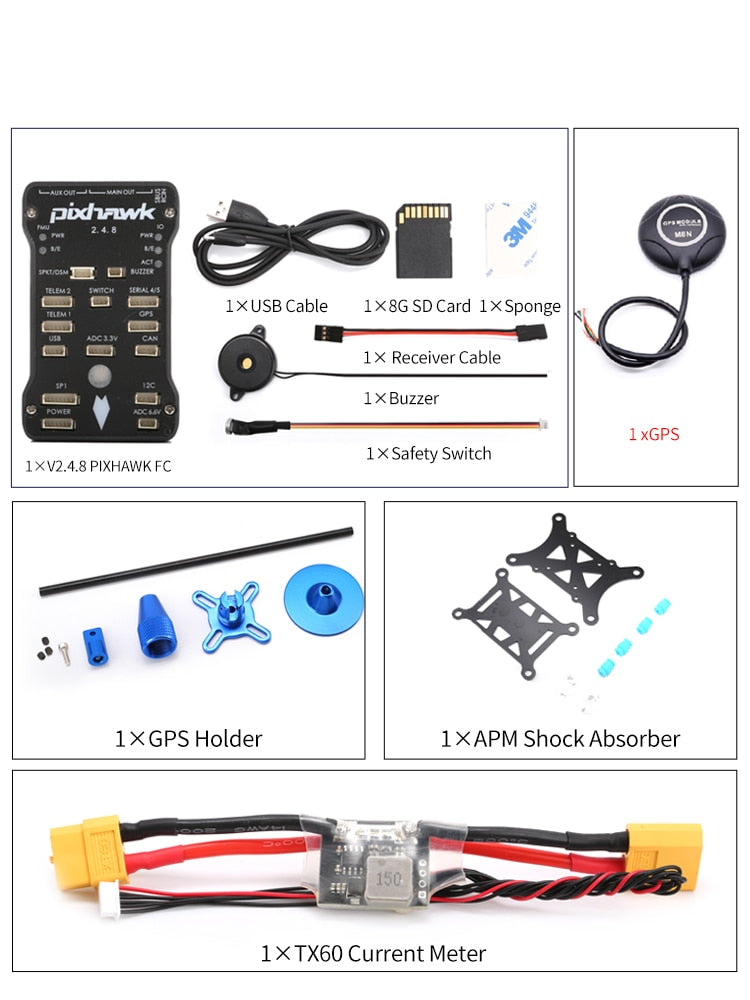
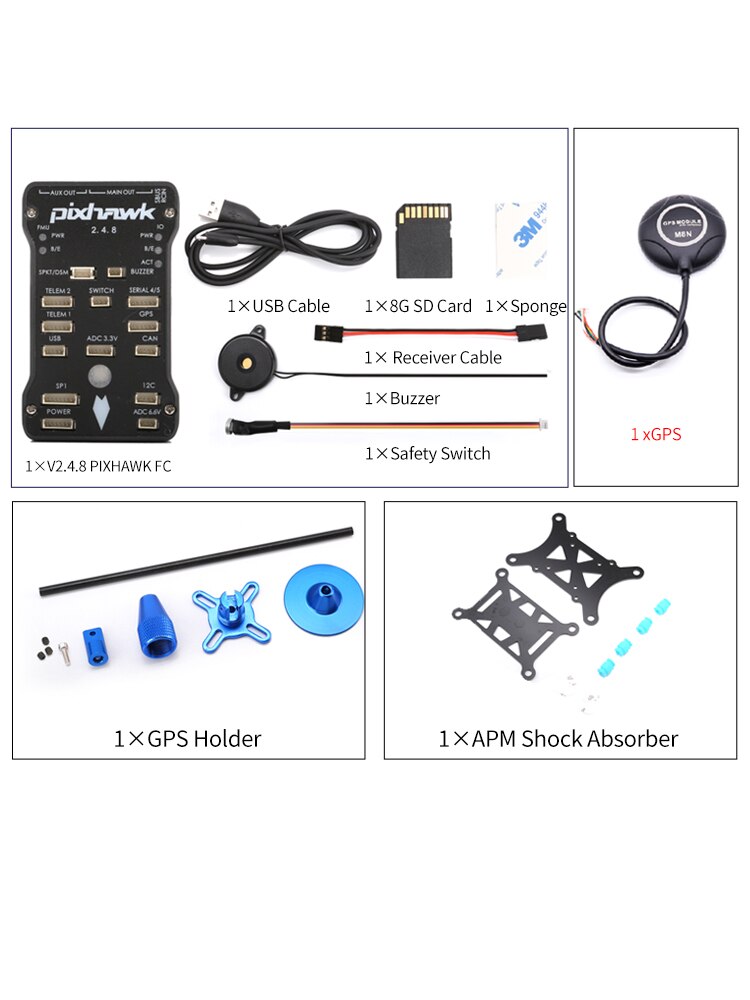
Pixhawk PX4 PIX 2.4.8 32-bitowe sterowanie lotem - FC M8N GPS 8G SD Buzzer PPM I2C Splitter dla RC FPV Samolot Drone Quadcopter Samochód Łódź
Pixhawk PX4 PIX 2.4.8 32-bitowe sterowanie lotem - FC M8N GPS 8G SD Buzzer PPM I2C Splitter dla RC FPV Samolot Drone Quadcopter Samochód Łódź
RCDrone
Nie można załadować gotowości do odbioru
SPECYFIKACJA 32-bitowego sterowania lotem Pixhawk PX4 PIX 2.4.8
Zastosowanie: Pojazdy i zabawki zdalnie sterowane
Uaktualnij części/akcesoria: Kontrola lotu
Materiały narzędziowe: Kategoria montażu
Urządzenia peryferyjne/urządzenia do zdalnego sterowania: Sterowanie lotem
Zalecany wiek: 14+lat
Części i akcesoria do zdalnie sterowanych pojazdów: Kontrola lotu
Ilość: 1 szt.
Pochodzenie: Chiny kontynentalne
Numer modelu: PIX2.4.8
Materiał: Materiał kompozytowy
Atrybuty napędu na cztery koła: Zespół
Dla typu pojazdu: Samoloty
Nazwa marki: XDRC
Opis:
- Zaawansowany 32-bitowy, wysokowydajny procesor CortexM4 ARM, obsługujący system operacyjny czasu rzeczywistego RTOS NuttX;
- Zintegrowany zasilacz zapasowy i kontroler rezerwowy w przypadku awarii, który główny kontroler może można bezpiecznie przełączyć na sterowanie rezerwowe;
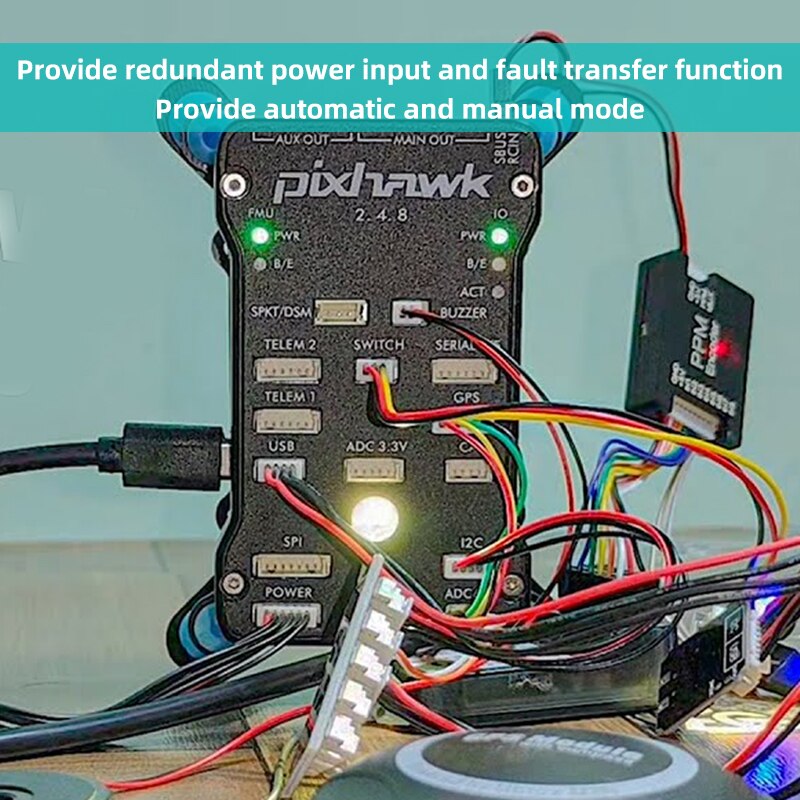
- Zapewnia redundantne wejście zasilania i funkcję przesyłania błędów;
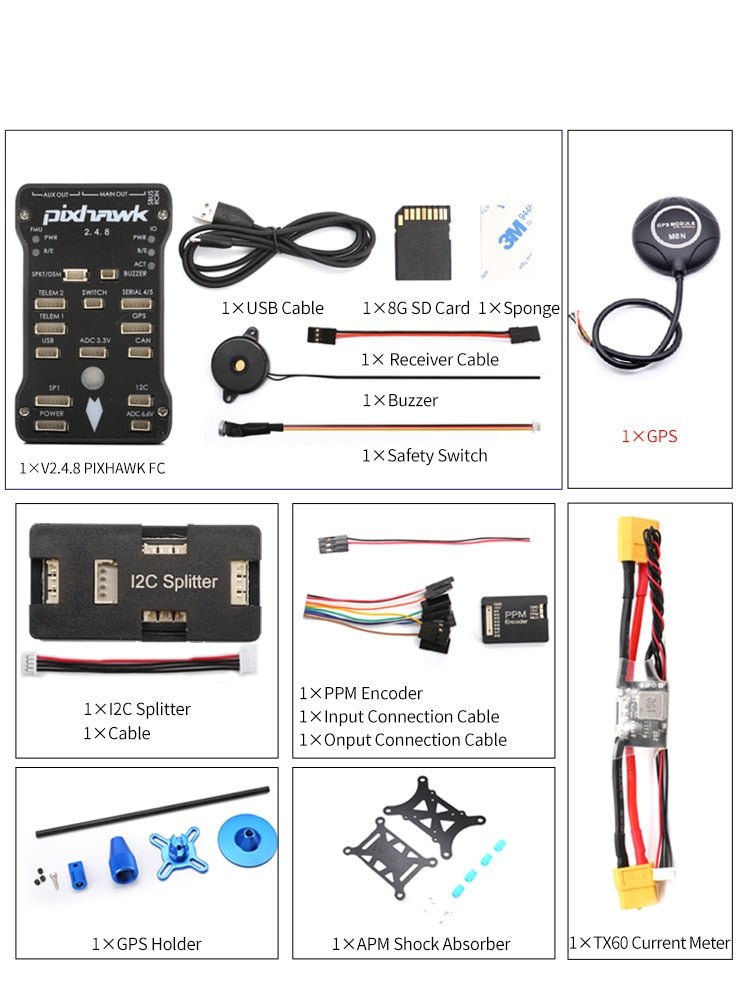
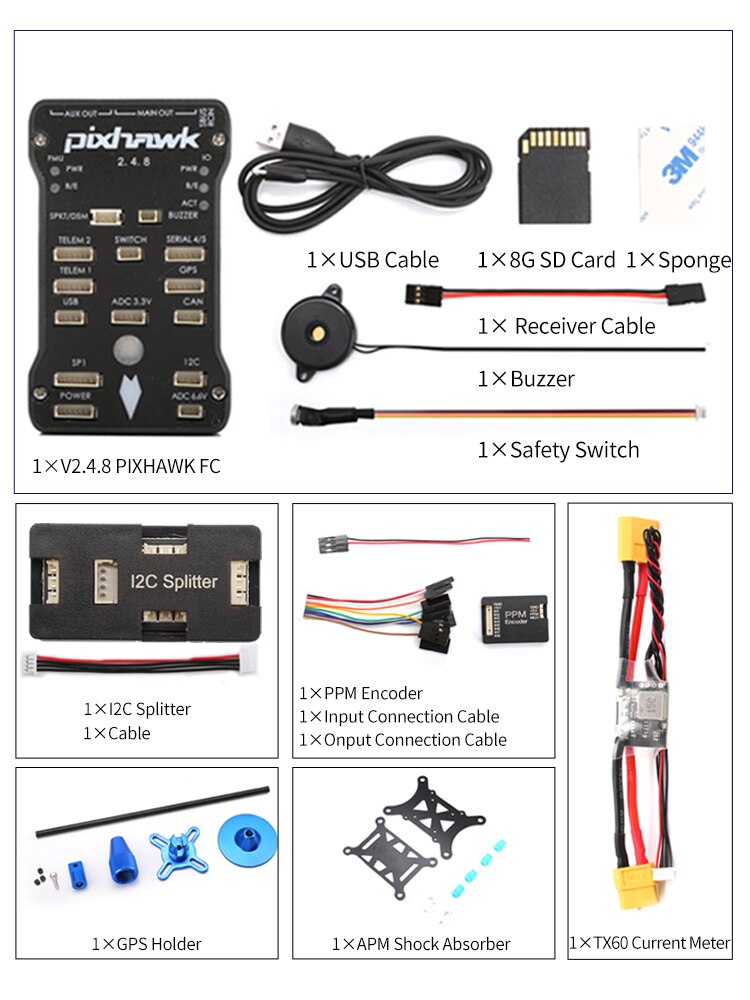
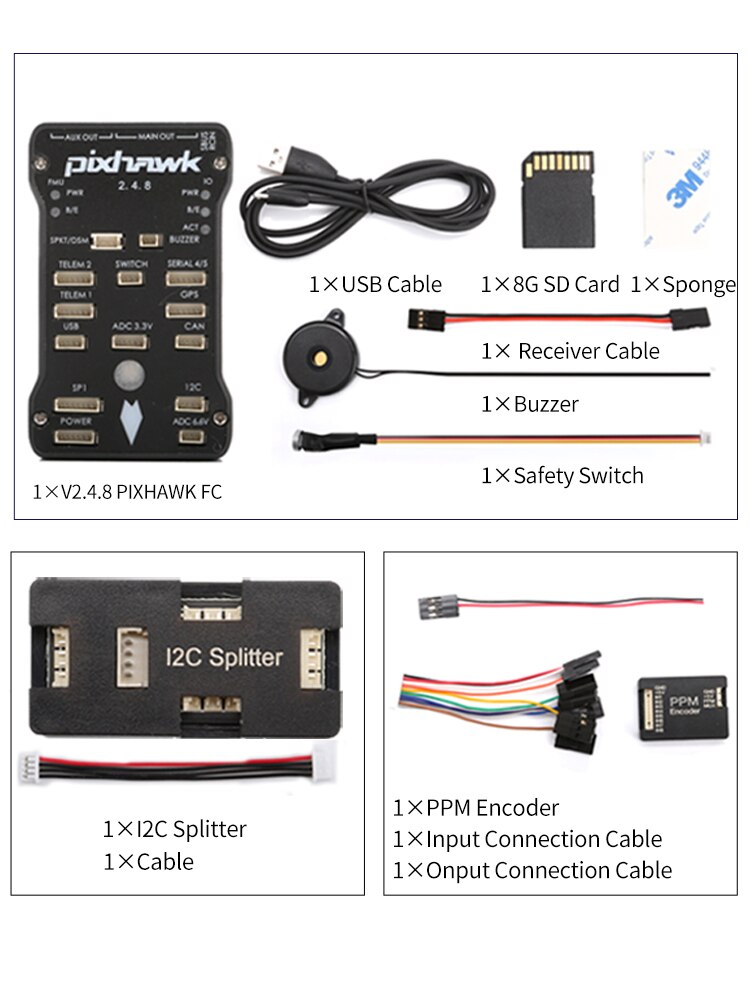
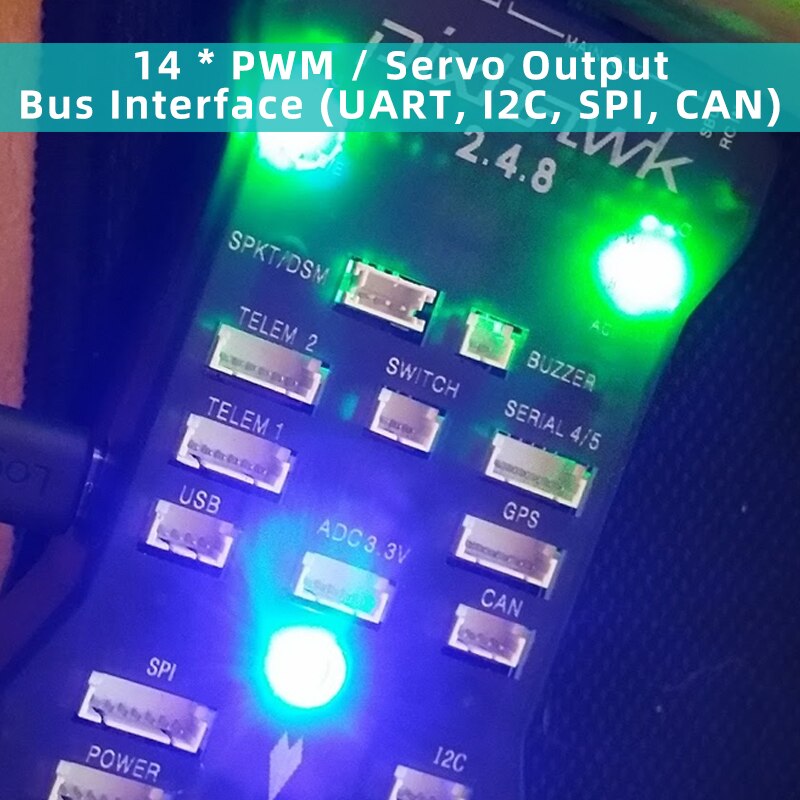
- 14 * wyjście PWM / serwo;
- Interfejs magistrali (UART, I2C, SPI, CAN);
- Zapewnia tryb automatyczny i ręczny;
- Kolorowa lampa LED;
- Wielotonowy interfejs brzęczyka;
- Karta Micro SD do rejestrowania danych lotu;
Specyfikacja:
Płyta integruje się z PX4FMU + PX4IO
Pixhawk jest wyposażony w nowy 32-bitowy chip i technologię czujnika
Procesor:
32-bitowa pamięć flash 2M STM32F427 Cortex M4, ze sprzętowym procesorem zmiennoprzecinkowym
Główna częstotliwość: 256K, 168MHz RAM
32-bitowy koprocesor zapasowy STM32F103
Czujnik:
3-osiowy cyfrowy 16-bitowy żyroskop L3GD20
LSM303D 3-osiowy 14-bitowy akcelerometr/magnetometr
MPU6000 6-osiowy akcelerometr/magnetometr
MS5611 o wysokiej precyzji barometr
Interfejs:
1. 5*UART (1*kompatybilne wysokie napięcie; 2*sprzętowa kontrola przepływu)
2. 2*MOŻE
3. Wejście kompatybilne z odbiornikiem satelitarnym Spektrum DSM / DSM2 / DSM-X
4. Wejście i wyjście kompatybilne z Futaba SBUS
5. Wejście sygnału PPM
6. Wejście RSSI (PWM lub napięcie)
7. I2C
8. SPI
9. Wejście 3,3 i 6,6 VA DC
10. Zewnętrzny interfejs USB MICRO


'iwrIGTB KeHRISTB USB CAN (kontroler sieciowy) EEES7+81033 LED Ja7FKJ Spi SPI #TJ96Q20) 12C 500E3273@ PoreR ADC 0 @ixitR 16E37+610%8 Dbduik 5X JX 630 PPM ES4A SBUS (S94' SMHS'RE SD 298 USD Itetl)

Related Collections