Pixhawk PX4 PRO PIX 32-bitowy kontroler lotu Autopilot - z 4G SD RC Quadcopter Ardupilot ArduPlane ArduRover
Pixhawk PX4 PRO PIX 32-bitowy kontroler lotu Autopilot - z 4G SD RC Quadcopter Ardupilot ArduPlane ArduRover
RCDrone
Nie można załadować gotowości do odbioru
DANE TECHNICZNE Autopilota Pixhawk PX4 PRO PIX 32-bitowego kontrolera lotu
Rozstaw osi: Płyta dolna
Zastosowanie: Pojazdy i zabawki zdalnie sterowane
Uaktualnij części/akcesoria: Rama
Materiały narzędziowe: Klasa zmontowana
Parametry techniczne: KV1100
Rozmiar: 80*48*15
Urządzenia peryferyjne/urządzenia do zdalnego sterowania: Pilot zdalnego sterowania
Zalecany wiek: 12+lat,14+lat
Części i akcesoria do zdalnie sterowanych pojazdów: Elementy silnika
Ilość: 1 szt.
Pochodzenie: Chiny kontynentalne
Numer modelu: PIXHAWK PRO
Materiał: EVA
Atrybuty napędu na cztery koła: Zespół
Dla typu pojazdu: Samoloty
Nazwa marki: rctosky

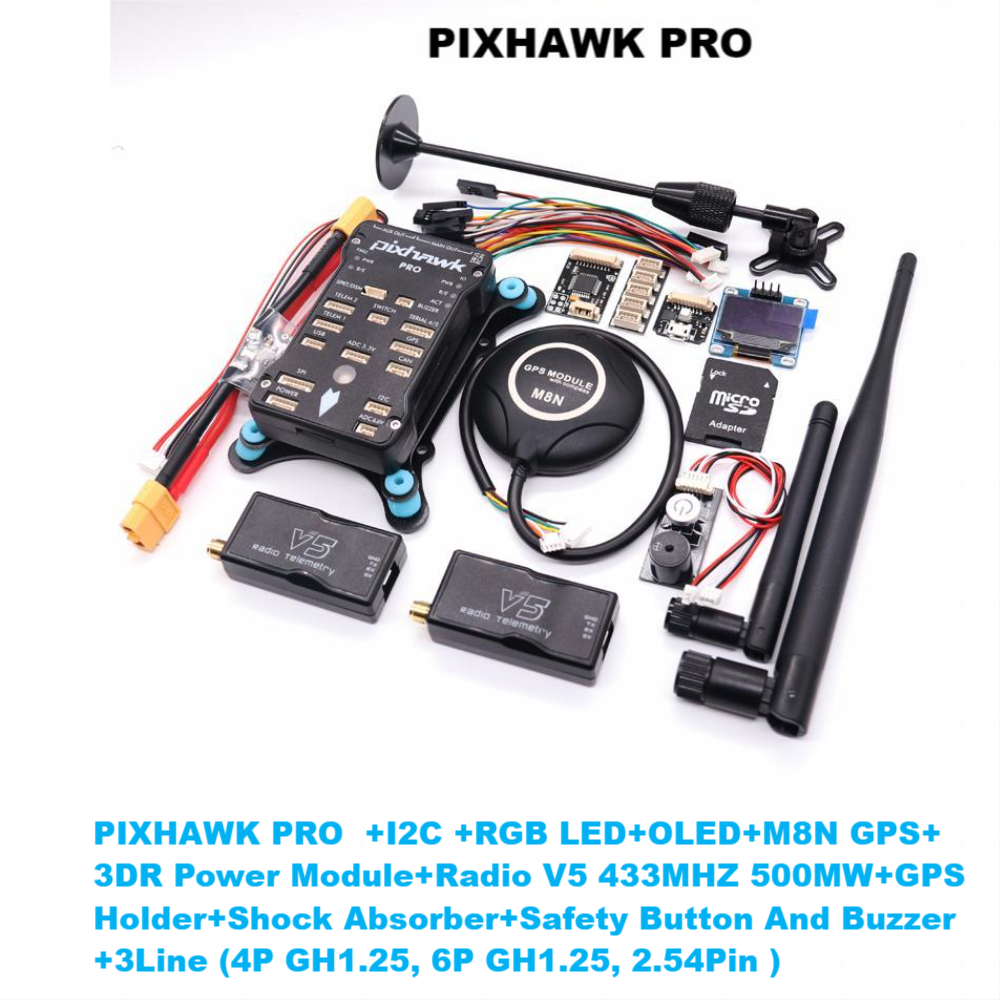
Pixhawk obsługuje najnowsze wersje oprogramowania ArduPilot i PX4, w tym 2.4.8 i PRO. Posiada dedykowany port GH z mechanizmem blokującym zapewniającym bardziej stabilne połączenie oraz interfejs USB TYPE-C zapewniający niezawodną komunikację.
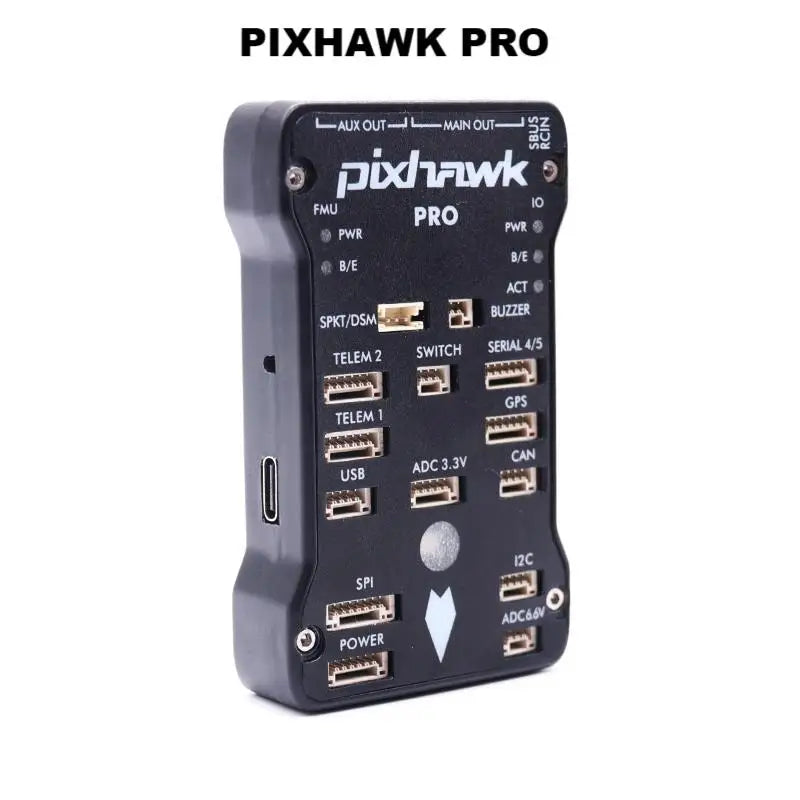



PIXHAWK PRO AUX OUT 32 pixdnuwk FMU PRO PWR FWR BE BTE ACT SPKTDSM BUZZER TELEM Przełącznik Serial4/5 TYPE-C USB TeLEM GPS USB ADC 3 3V CAN SPI 12C POWER AdcG6
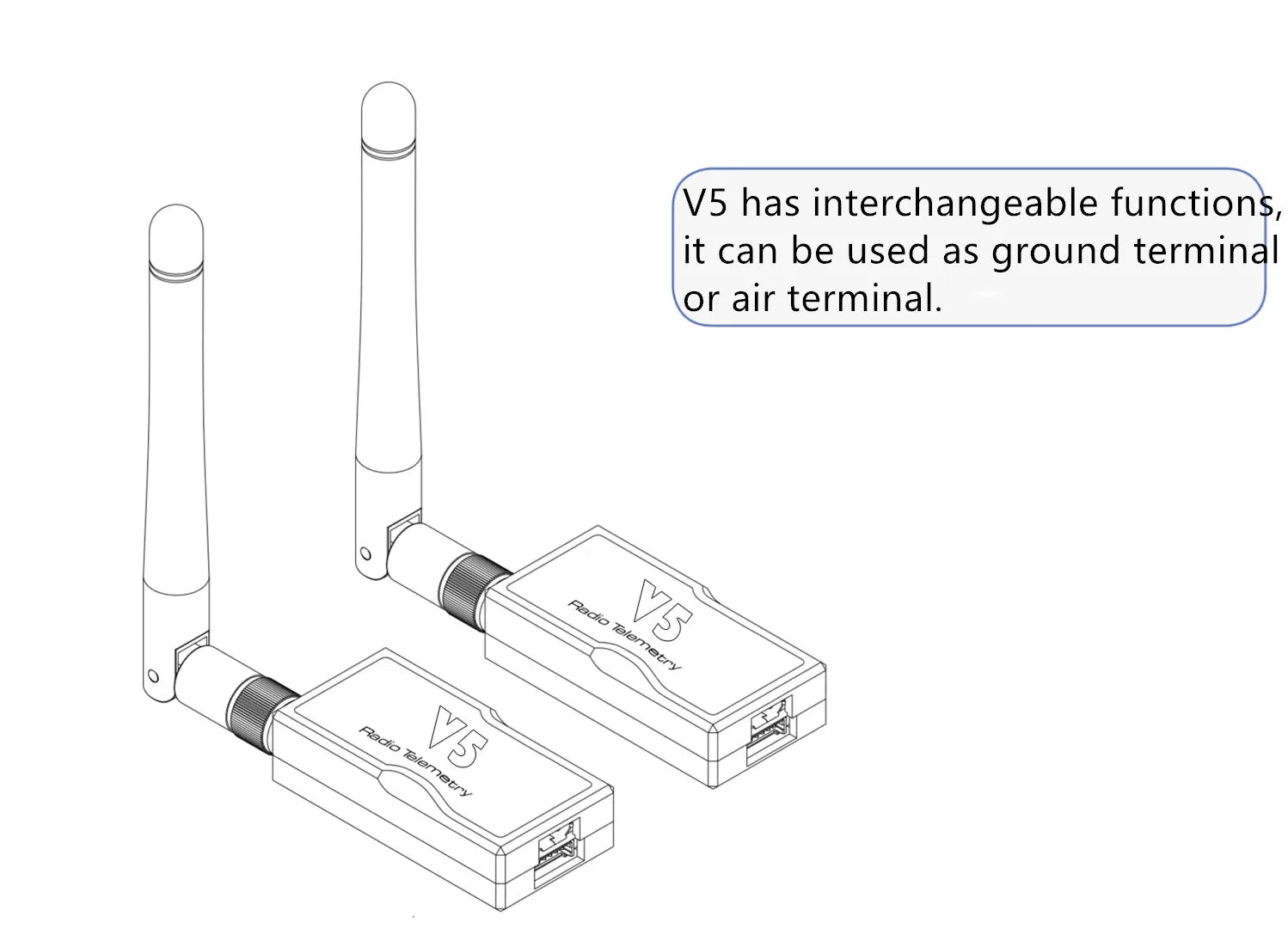
Kontroler lotu Pixhawk PX4 PRO ma wymienne funkcje, dzięki czemu może być używany zarówno jako stacja naziemna, jak i terminal pokładowy.
![[4] [1] [2] [3] Radio Talemet](https://rcdrone.top/cdn/shop/files/H8ea99d00a908494db39129dc6647352a5_2f6b2a1e-638a-4d31-9f81-30e9dc1b04c8.webp?v=1714895618)
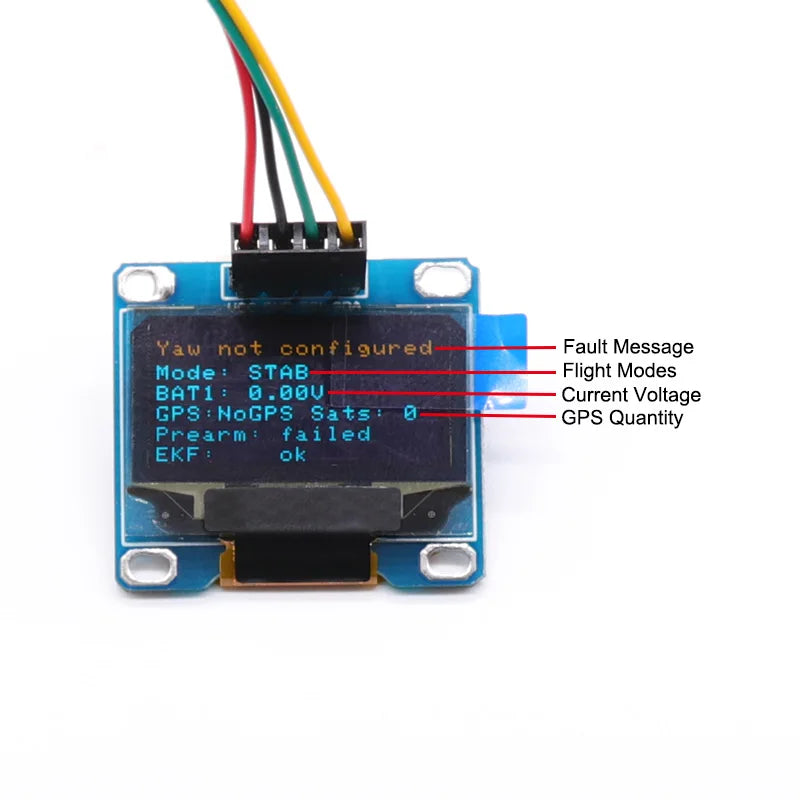
Ostrzeżenie: Nie skonfigurowano. Tryb komunikatu o błędzie: niedostępne stabilne tryby lotu. Poziom baterii: 0% (BAT1). Prąd: 0,00 uA. Napięcie: nieznane. GPS: brak sygnału GPS. Ilość GPS: nieznana. Przedramię nie powiodło się. Nie zainicjowano EKF.
Related Collections