







Qav250 250 mm FPV Drone Drone z 2205 2300KV silnikami, kontroler lotu F4, Littlebee 30A Blheli_S ESC i kamera 1200TVL
Qav250 250 mm FPV Drone Drone z 2205 2300KV silnikami, kontroler lotu F4, Littlebee 30A Blheli_S ESC i kamera 1200TVL
RCDrone
Nie można załadować gotowości do odbioru

Zawartość opakowania:
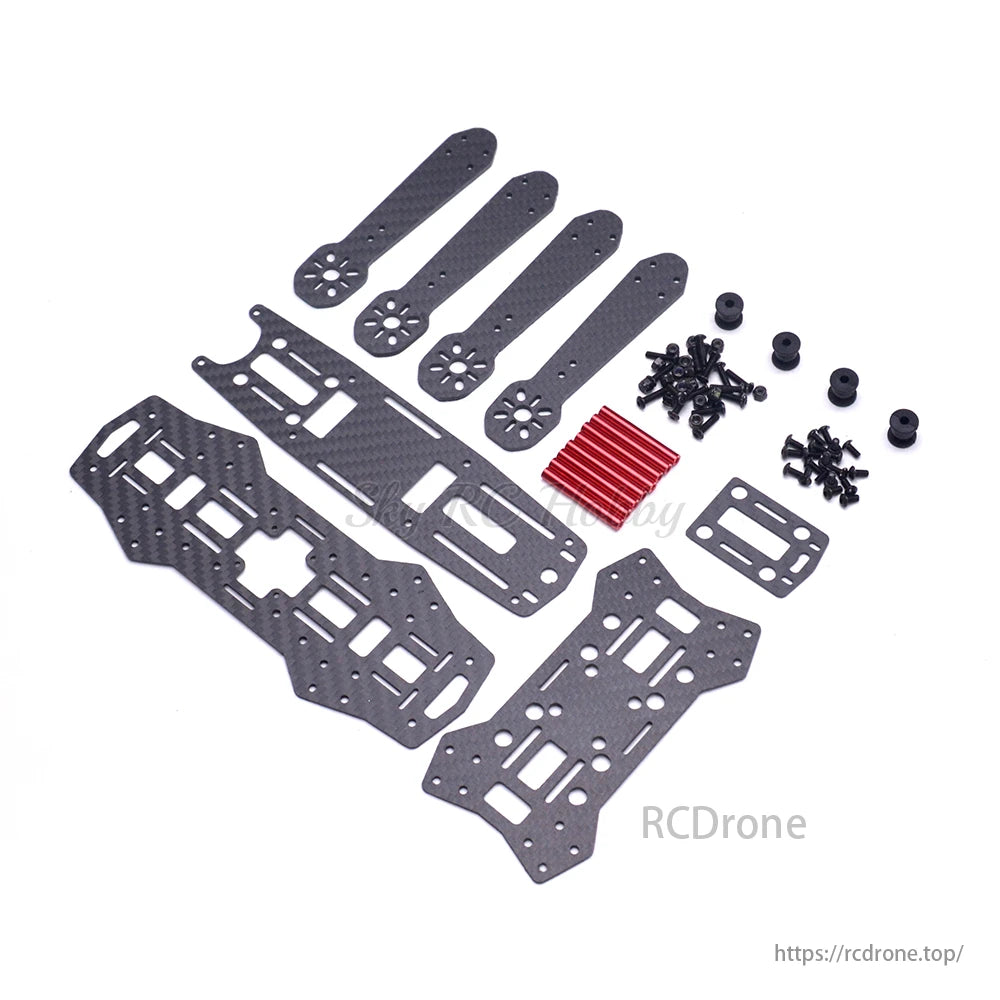
1 x Zestaw ramy z włókna węglowego ZMR250
4 x RS2205 2300kv Silnik
4 x Regulator Littlebee 30A (Uwaga: Dostępne są dwa rodzaje regulatorów Littlebee 30A, wysyłamy je losowo.)
1 x F3 Akrobatyka / Kontroler lotu F4 V3S / F405 Plus (Wyślij jako swój wybór)
1 x Płytka rozdzielcza zasilania
1 kamera 1200TVL
4 śmigła x 5045
1 x UBEC
1 x Pasek na baterie
Zestaw ramy z włókna węglowego QAV250 o średnicy 250 mm:
Dane techniczne:
- Materiał główny: Pełne włókno węglowe
- Z gumowym amortyzatorem redukującym drgania podczas lotu
- Dystans ze stopu aluminium, lekki, niezawodny
- Rozstaw osi: 250mm
- Waga: 136g±2

Kontroler lotu F3 ACRO:
Cechy
• Brak kompromisów w zakresie I/O. Korzystaj ze wszystkich funkcji przez cały czas, np. podłącz OSD + SmartPort + SBus + GPS + LED Pasek + monitorowanie akumulatora + sonar + 8 silników - wszystko w tym samym czasie!
• Pokładowy rejestrator lotu w czarnej skrzynce o dużej pojemności – zoptymalizuj ustawienia i zobacz wyniki konfiguracji bez zgadywanie (Deluxe).
• Procesor nowej generacji STM32 F3 z jednostką zmiennoprzecinkową do wydajnych obliczeń lotu i szybszego
Rdzeń ARM-Cortex M4.
• Konstrukcja umożliwiająca układanie w stosy - idealna do integracji z OSD i płytami dystrybucji zasilania.
• 16 linii PWM I/O dla regulatorów ESC, serwomechanizmów i starszych odbiorników. 8 dostępnych na standardowych listwach kołkowych. 8 przez boki zamontowane złącza.
• Pełne wsparcie dla regulatorów OneShot ESC umożliwiających łatwe dostrajanie PID i szybszą reakcję.
• Obsługuje odbiorniki SBus, SumH, SumD, Spektrum1024/2048, XBus, PPM, PWM. Nie są wymagane żadne zewnętrzne inwertery. (wbudowane).
• Dedykowane wyjście na programowalne diody LED - idealne do orientacji, wyścigów i lotów nocnych.
• Dedykowany port I2C umożliwiający podłączenie wyświetlacza OLED bez konieczności używania akumulatora pokładowego.
• Porty monitorujące napięcie i natężenie prądu akumulatora.
• Obsługa sonaru umożliwiająca precyzyjne trzymanie wysokości na niskim pułapie.
• Port brzęczyka do wysyłania ostrzeżeń i powiadomień dźwiękowych.
• Przyjazny dla programistów port debugowania (SWD) i wybór trybu rozruchu, bootloader odporny na uszkodzenia.
• Symetryczna konstrukcja zapewniająca bardzo uporządkowane okablowanie.
• Podłącz za pomocą listew zaciskowych, gniazd JST-SH lub pól lutowniczych. Użyj listew zaciskowych kątowych lub prostych.
• Barometr zamontowany na spodzie deski w celu łatwej izolacji od wiatru.
• Czasy pętli są do ~2x szybsze niż w przypadku poprzedniej generacji płytek opartych na STM32F1.
• Konfiguracja kontrolera lotu poprzez wieloplatformowy interfejs graficzny (Windows/OSX/Linux).
• Obsługuje szeroką gamę samolotów, tricopterów, quadrocopterów, heksakopterów, oktokopterów, samolotów i innych.
Oprogramowanie
W samolocie SPRacingF3 zastosowano oprogramowanie do sterowania lotem (FC) typu open source Cleanflight, którego społeczność stale rośnie przyjaznych deweloperów i użytkowników. Bycie open-source oznacza, że Ty również możesz przyczynić się do rozwoju systemu.
Cleanflight jest dostarczany ze szczegółowym podręcznikiem, który jest sprawdzany i aktualizowany przez programistów Cleanflight. społeczność. Koniec z nieaktualnymi stronami wiki i informacjami z drugiej ręki.
Upewnij się, że korzystasz z instrukcji odpowiedniej dla wersji oprogramowania sprzętowego.
Historia
Sprzęt został zaprojektowany przez głównego programistę Cleanflight, Dominica Cliftona, tak aby był bardziej wydajny niż Płytki bazujące na STM32F1 po wysłuchaniu opinii użytkowników, współpracowników i pilotów Cleanflight.
Niedostosowanie się do tych ostrzeżeń spowoduje unieważnienie gwarancji i zniszczenie lotu kontroler.
• Zawsze przestrzegaj biegunowości. Sprawdź i SPRAWDŹ DWUKROTNIE przed podłączeniem zasilania.
• WYŁĄCZ ZASILANIE przed odłączeniem, podłączeniem lub wykonaniem jakichkolwiek połączeń.
• Podłączaj tylko jedno ŹRÓDŁO zasilania do pinów VCC / Nie podłączaj więcej niż jedno źródło zasilania dla dwóch lub więcej pinów VCC. np. jeśli używasz regulatorów ESC za pomocą BEC, a następnie odłącz środkowy CZERWONY przewód ze wszystkich złączy ESC oprócz jednego.
• Nie wolno łączyć ze sobą przewodów GND, VCC ani 3,3 V (zwarcie).
• Nie podłączaj GND, VCC ani 3,3 V do żadnych wejść ani wyjść, chyba że wyraźnie zaznaczono inaczej.
• Nie podłączaj żadnego wejścia ani wyjścia do żadnego innego wejścia lub wyjścia, chyba że wyraźnie na to wskazujesz.
stwierdzono.
• Zasilanie 3,3 V przeznaczone jest wyłącznie do użytku niskoprądowego. MAKS. 100 mA.
• Nie dopuść do przedostania się brudu, kurzu, kleju itp. do czujnika ciśnienia (barometru).
• Trzymaj magnesy z dala od kontrolera lotu.
OSTRZEŻENIA
PORADY OGÓLNE
Aby uzyskać najlepszą wydajność i długą żywotność kontrolera lotu, postępuj zgodnie z poniższymi wskazówkami:
• Nałóż żywicę/klej, aby wzmocnić złącza JST-SH - pomoże to w przypadku rozbicia samolotu.
• Zaleca się używanie obudowy/skrzynki dla kontrolera lotu.
• Zamontuj piankę otwartokomórkową pod czujnikiem ciśnienia – umieść trochę pomiędzy czujnikami ciśnienia i ramka.
• Poprowadź przewody silnika/akumulatora jak najdalej od czujnika kompasu (magnetometru) jak to możliwe.
• Zamontuj piny zworki BOOT tylko wtedy, gdy będą potrzebne.
• Zalecane jest stosowanie kolorowych nagłówków kołkowych (nie są dołączone), szczególnie w przypadku VBAT nagłówki.
• Zrób wszystko co możliwe, aby zapobiec przedostawaniu się drgań do akcelerometru/czujnika żyroskopowego.
Okular:
* Płytka 36x36mm z otworami montażowymi o rozstawie 30,5mm.
* Procesor STM32F3.
* Akcelerometr/żyroskop MPU6050
* Gniazdo microUSB.
* 4x 4-pinowe gniazda JST-SH (I2C, SWD, 2xUART)
* 2x 8-pinowe gniazda JST-SH (PPM, PWM, SERIAL RX, GPIO, ADC, 3V, 5V, GND)
* 8x 3-pinowe otwory przelotowe do złączy pinowych do połączeń ESC/Servo.
* 2x 4-pinowe otwory przelotowe na złącza kołkowe dla 2 portów szeregowych.
* 2x 2-pinowe otwory przelotowe do podłączenia złączy pinowych do napięcia akumulatora i brzęczyka.


Specyfikacja kontrolera lotu F4 V3S Plus:
Oprogramowanie układowe: OMNIBUSF4SD
Rozmiar: 36x36mm
Otwory montażowe: 30,5x30,5mm
Mikrokontroler STM32 F405
Wsparcie Dshot
Przeciągnij i upuść OSD skonfigurowane za pomocą Betaflight
MPU: MPU6500 / MPU6000 (Wyślij losowo)
Porty SBUS / PPM i Spketrum DSMX
Czarna skrzynka na kartę MicroSD
Baro (BMP280)
5v3a 9V3A BEC
Filtry wideo na pokładzie (tylko 5 V do VTX i kamery)
Dzięki procesorowi F4, wbudowanemu systemowi OSD Betaflight, karcie MicroSD Black Box, 5v3a sbec, filtrowi wideo, będziesz mógł dostroić PID-y za pomocą nadajnika i
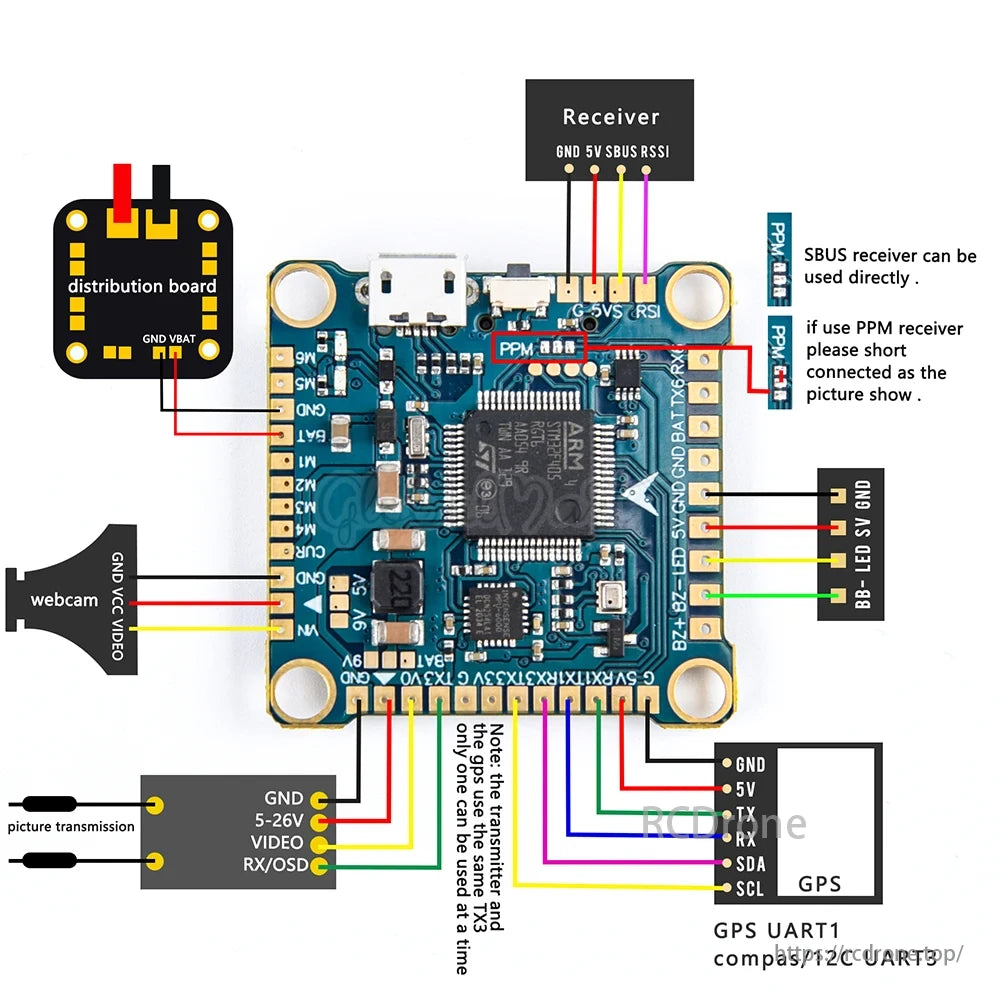
Schemat okablowania drona QAV250 FPV. Łączy płytkę rozdzielczą, kamerę internetową, transmisję obrazu, odbiornik (SBUS/PPM) i GPS. Najważniejsze cechy: UART1 dla GPS i UART3 dla kompasu/I2C.

Kontroler lotu F4 V3S Plus do drona FPV QAV250. Posiada port USB, wiele złączy i opisane piny dla łatwej integracji i kontroli.
Parametry produktu:
Mikrokontroler: STM32F405RGT6 168MHz
Żyroskop: Mpu6500
Baro:Bmp280
OSD: Betaflight SPI OSD DJI HD OSD (UART5)
Czarna skrzynka: 16MB
6x UART: UART 1/2/3/4/5/6
4 wyjścia PWM
1x I2C
2x diody LED dla STANU FC (niebieska) i wskaźnik 3,3 V (czerwony) oraz wskaźnik 5 V (czerwony) i wskaźnik 9 V (czerwony)
USB typu C (USB2.0)
1x złącze JST-SH1.0_8pin (Gnd/Vbat/S1/S2/S3/S4/Curr/Rx3)
1x złącze JST-SH1.0_6pin (9V/GND/T5/R5/GND/R2)
Moc filtrowana VTX 9V
DJI FPV OSD jest obsługiwany przez każdy zapasowy UART
LED: 4 niezależne pady LED, obsługa wyjścia lampy programującej WS2812.
Odbiornik: obsługuje odbiorniki Sbus, crsf, ibus, SBUS, XBUS,
Domyślnym wejściem odbiornika jest UART2 (można przylutować ELRS RX do UART2).
Moc: Napięcie wejściowe: 3-6S
BEC: dwukanałowy BEC 5 V/10 V 3 A maks. zapewnia stabilne zasilanie po stronie nieba DJI
LDO 3,3 V: maks. 1 A
Oprogramowanie układowe FC: Oprogramowanie układowe BetaFlight: DAKEFPVF405
Oprogramowanie układowe INAV: DAKEFPVF405
Montowanie:
Rozmiar montażowy: 30,5 mm × 30,5 mm Otwór montażowy to M4 i obsługuje montaż kolumny amortyzatora
Rozmiar zewnętrzny 36mm × 36mm
Waga układu sterowania lotem: 6,9 g
Czujnik napięcia pokładowy układu sterowania lotem.



Silnik RS2205 2300kv:
Uwaga: Ze względu na różną partię produkcyjną istnieją dwa rodzaje projekt silnika, wyślemy silnik losowo.

Cztery silniki do drona QAV250 FPV firmy Ready Tosky, w czarno-czerwonym kolorze z widocznym okablowaniem umożliwiającym montaż drona.

Uwaga: Dostępne są dwa rodzaje regulatorów Littlebee 30A, wysyłamy je losowo.

Cztery ulubione LITTLEBEE 30A-S BLHeli_S OPTO ESC obsługują akumulatory LiPo 2-6S. Charakteryzują się kompaktową konstrukcją ze złoconymi złączami. Czarne i pomarańczowe przewody oznaczają połączenia zasilania. Te elektroniczne regulatory prędkości regulują prędkość silnika w dronach FPV, takich jak QAV250, zapewniając precyzyjną kontrolę i wydajną pracę. Ich smukła konstrukcja i solidna konstrukcja sugerują niezawodność w wyścigach dronów o wysokiej wydajności i zastosowaniach fotografii lotniczej. Idealne dla entuzjastów poszukujących jakości i wydajności.

Ulubione BLHeli S ESC do drona FPV QAV250. LittleBee-Spring 30A, kompatybilny z Dshot, obsługuje 2-6S LiPo. Cztery jednostki z czerwonymi, czarnymi i białymi przewodami w zestawie. Kompaktowa konstrukcja zapewniająca wydajną pracę.

Ulubiony regulator BLHeli S LittleBee-Spring30A 2-6S LIPO Dshot ESC z czerwonymi, czarnymi i białymi przewodami do drona FPV QAV250.

Related Collections







