Rc Car Off Road 4x4 High Speed 75KM/H Remote Control Car - Z reflektorem LED Bezszczotkowy 4WD 1/16 Monster Truck Zabawki dla chłopców Prezent
Rc Car Off Road 4x4 High Speed 75KM/H Remote Control Car - Z reflektorem LED Bezszczotkowy 4WD 1/16 Monster Truck Zabawki dla chłopców Prezent
RCDrone
Nie można załadować gotowości do odbioru
Rc Car Off Road 4x4 High Speed 75KM/H Zdalnie sterowany samochód SPECYFIKACJA
Rozstaw osi: 185mm
Typ: Samochód
Rozstaw opon: 188mm
Serwo przepustnicy: 2,4g
Wspomaganie układu kierowniczego: Pięcioprzewodowa przekładnia kierownicza 17G
Stan montażu: Prawie gotowy
Skala: 1:16
Pilot zdalnego sterowania: Tak
Zalecany wiek: 12+lat,14+lat
Pakiet zawiera: baterie, instrukcję obsługi, ładowarkę, pilota zdalnego sterowania
Pochodzenie: Chiny kontynentalne
Numer modelu: SCY-16101
Materiał: Metal, tworzywo sztuczne
Czas lotu: 15-18 min
Funkcje: Pilot zdalnego sterowania
Wymiary: 1/16
Projekt: Samochody
Tryb kontrolera: TRYB1,TRYB2
Kanały sterujące: 4 kanały
Napięcie ładowania: 7,4V 1300mAH
Certyfikat: CE
Nazwa marki: DISHUO
Pyt. 1: Dlaczego opony samochodu zdalnie sterowanego są odsłonięte?
A: [Specjalna konstrukcja] Przyczepność w palcach jest mocna i niełatwa do dryfowania, co pomaga poprawić stabilność nadwozia i przyczepność opony na zakrętach.
Pyt. 2: Jak wyregulować nachylenie opon samochodu zdalnie sterowanego?
A: Można to regulować za pomocą przycisków precyzyjnej regulacji i precyzyjnej regulacji przepustnicy na pilocie zdalnego sterowania.
P3: Co powinienem zrobić, jeśli nie mogę znaleźć moich akcesoriów?
O: Proszę najpierw dokładnie sprawdzić paczkę; Jeśli go nie znajdziesz, pomóż nam z pełnym filmem o rozpakowaniu, a my sprawdzimy ten problem w naszym magazynie i zapewnimy odpowiednie rozwiązanie.
P4: Co powinienem zrobić, jeśli mojego pilota nie można podłączyć do RC?
O: Upewnij się, że bateria jest w pełni naładowana. Następnie ręcznie sparuj samochodzik z pilotem. Możesz także zapoznać się z instrukcją obsługi, aby uzyskać szczegółowe informacje na temat dopasowania samochodzika. Możesz przetestować napięcie płyty głównej, aby móc przeanalizować, na czym polega problem.
P5: Co powinienem zrobić, gdy samochodzik-zabawka może skręcać i nie może poruszać się do przodu ani do tyłu po podłączeniu pilota do pilota zdalnego sterowania?
O: Najpierw sprawdź, czy bateria jest w pełni naładowana, a następnie sprawdź napięcie płyty głównej i silnika, aby móc przeanalizować, na czym polega problem.
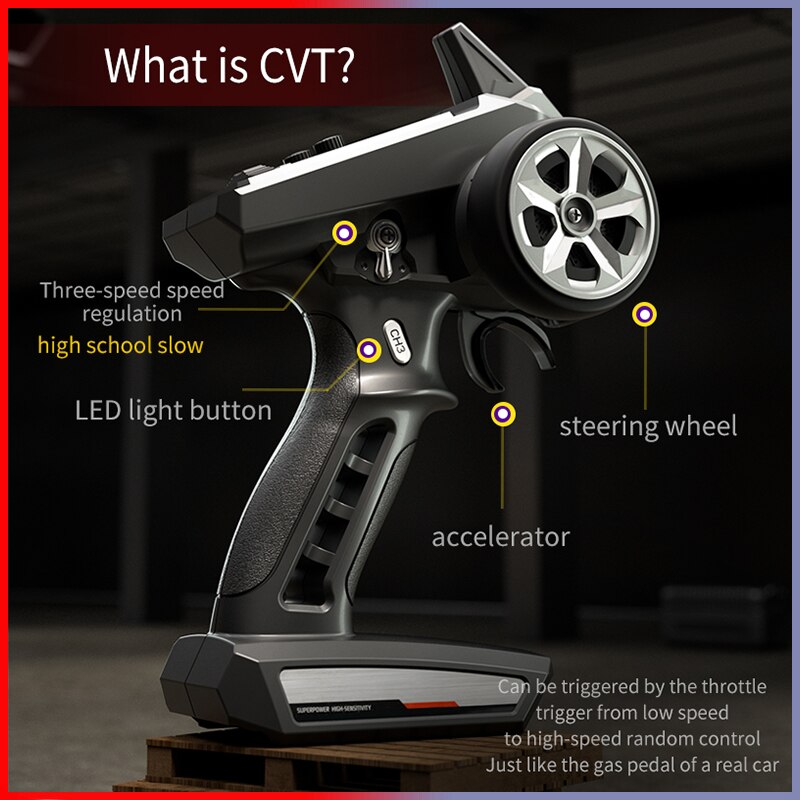
1, Wykorzystanie projektu struktury symulacyjnej, z wyczuciem kontroli prawdziwego samochodu, w celu osiągnięcia pełnej skali bezstopniowej prędkości, jazdy z dużą prędkością, szybkiego przyspieszania, zwalniania, hamowania, cofania, skrętu w lewo i w prawo;
2, odpowiednie miejsce: płaskie, piaszczyste, błotniste, trawa.
3, napęd na cztery koła: przed i za amortyzacją sprężyny pionowej, niezależny układ zawieszenia z podwójnymi widelcami;
4,2,4G w pełni proporcjonalny synchroniczny system zdalnego sterowania. Pełne otwarcie przepustnicy/sterowanie;
5. Zintegrowana elektryczna regulacja/odbiór 2,4G z zabezpieczeniem przed rozpryskami, 30A;
6, wał napędowy z przegubem kulowym przednim, przegubem uniwersalnym, dzielonym wałem napędowym z kością tylnego koła;
7.Przekładnia kierownicza 17G piątej linii;
8, super moc akumulatora: 7,4V, akumulator litowo-jonowy 18650-1300mAh (wtyczka T), szybkość rozładowania 10C;
9, w całym samochodzie zastosowano 16 łożysk kulkowych;
10, metalowe drugie piętro, metalowy kod wahacza przedniego i tylnego, metalowy wał napędowy;
11. W karoserii samochodu zastosowano powłokę samochodową z przeciwwybuchowego PCV o wysokiej wytrzymałości;
12, wyposażony w reflektor LED; (tryb trzech biegów: światło ciągłe, powolne miganie, szybkie miganie);
13, wyposażony w koło czołowe;
14, opona symulująca dużą stopę, mocna przyczepność;
Maksymalna prędkość: 50KM/H
Rozmiar: 30*23*11,5 CM
Akumulator: 7,4 V 1300 mAh
Silnik napędowy: wysokoobrotowa szczotka węglowa RC390, silny magnes
Waga: 930g
Czas pracy: 15 minut















 0179>
0179> 



Model RC jest wyposażony w włókno węglowe klasy 390 korpus, zasilany wysokowydajnym akumulatorem 7,4 V 1300 mAh napędzającym mocny silnik magnetyczny z 16 łożyskami kulkowymi, zapewniający płynną i trwałą pracę.
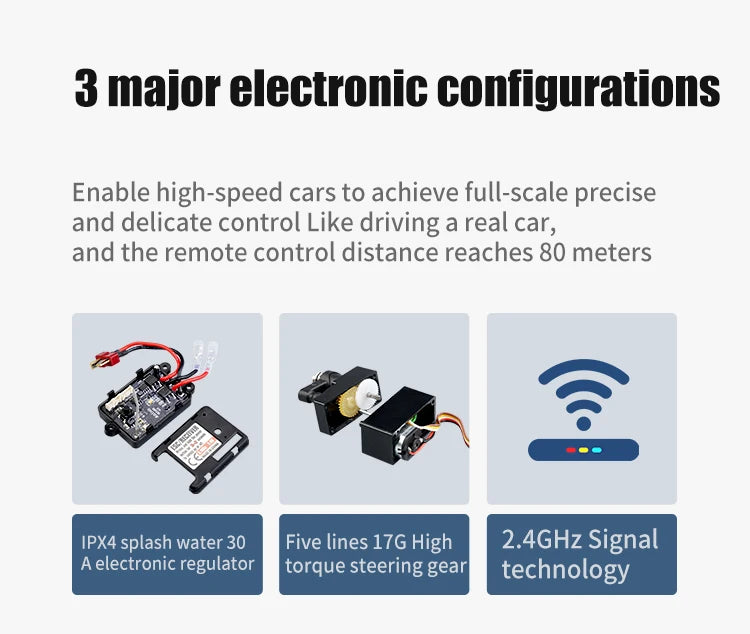
Trzy zaawansowane konfiguracje elektroniczne pozwalają na precyzyjne i delikatne sterowanie, naśladując wrażenia z jazdy prawdziwym samochodem. Odległość zdalnego sterowania sięga imponujących 80 metrów, a stopień wodoodporności IPX4 zapewnia trwałość w różnych warunkach pogodowych. Dodatkowo system charakteryzuje się wysoką siłą sygnału o częstotliwości 2,4 GHz, zapewniając stabilną komunikację pomiędzy nadajnikiem a odbiornikiem. Elektroniczny regulator zapewnia precyzyjne sterowanie momentem obrotowym, umożliwiając płynne i kontrolowane ruchy.
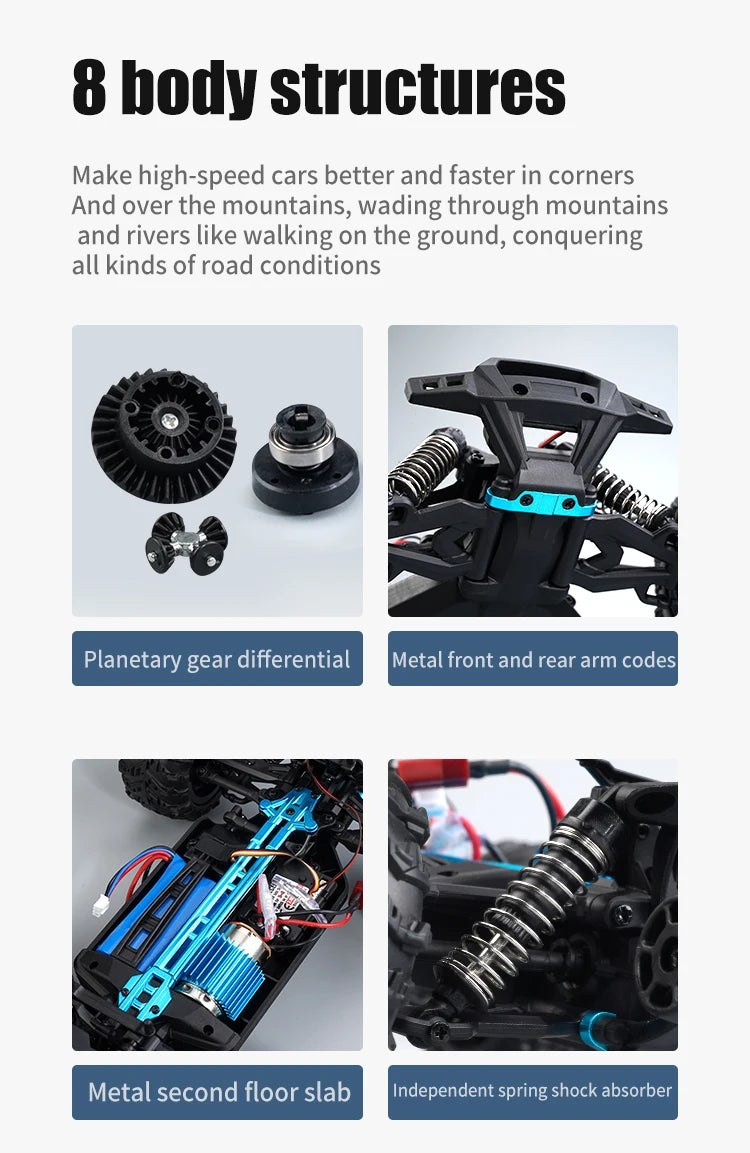
Osiem solidnych elementów nadwozia zwiększa osiągi tego szybkiego pojazdu terenowego, umożliwiając mu z łatwością poruszanie się w trudnym terenie.Może pokonywać zakręty i góry z dużą prędkością, a także brodzić przez rzeki i pokonywać nierówne podłoże, zupełnie jak podczas chodzenia po płaskim terenie.
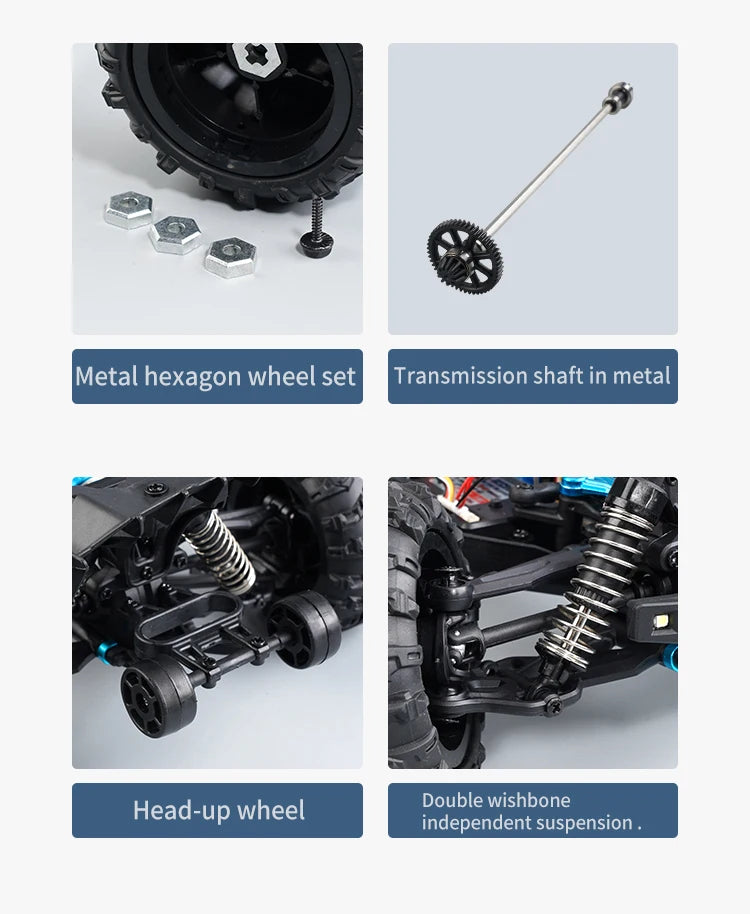
Ten zdalnie sterowany samochód ma wysokowydajną konfigurację z metalowymi sześciokątnymi koła, wał napędowy wykonany z wytrzymałego metalu oraz innowacyjny system zawieszenia z podwójnymi wahaczami, który zapewnia płynny, niezależny ruch koła przez uniesione nadwozie.


Profesjonalne wykonanie i skrupulatny projekt łączą się, aby stworzyć niezawodny i trwały produkt. Zaawansowany system odprowadzania ciepła w połączeniu z solidnym metalowym wałem transmisyjnym gwarantuje, że pojazd wytrzyma regularne użytkowanie bez uszkodzeń.

Ten samochód RC jest wyposażony w model klasy 390 z szybkim, bezszczotkowym silnikiem węglowym silnik i mocny magnes, zamontowany na metalu dla zwiększenia trwałości. Przekładnie wykonane z metalurgii proszków metali zapewniają płynną i niezawodną pracę, umożliwiając graczom jazdę bez martwienia się o problemy mechaniczne.


Ten szybki zdalnie sterowany samochód jest wyposażony w mocny silnik bezszczotkowy, który rozdziela moc naukowo racjonalny sposób zapewnienia wyjątkowego momentu obrotowego. Rezultatem są solidne i mocne osiągi.

Wyposażony w profesjonalne koła o dużej przyczepności, ten terenowy monster truck zapobiega przewróceniu się i przetoczeniu spowodowanemu nadmierną prędkością podczas lądowania, zapewniając stabilną pozycję nadwozia.

Ten monster truck charakteryzuje się sześcioma kluczowymi konfiguracjami konstrukcyjnymi, w tym proporcjonalnym sterowaniem przepustnicą, proporcjonalnym układem kierowniczym, wodoodpornością IPX4, funkcją proporcjonalnego hamulca, dużą amortyzacją i poszerzonymi oponami zapewniającymi lepszą wydajność.

Cały pojazd ma solidną konstrukcję z podwoziem na bazie nylonu i może pochwalić się wytrzymałym zderzakiem przednim i tylną częścią.



Posiada 2-osiowy proporcjonalny system zdalnego sterowania ze wskaźnikiem światła, które można regulować w celu dokładnego dostrojenia, a także funkcje trymowania i prędkości cofania. Zawiera przełącznik „ON/OFF” do sterowania kierunkiem pojazdu.

Produkt jest wyposażony w mocny silnik ze szczotką węglową i mocnym magnesem, zdolny do dostarczenia czterech sił napędowych zapewniających wysoką wydajność . Dane techniczne obejmują: prędkość - do 50 km/h; czas jazdy – około 20 minut; czas ładowania - 2-3 godziny. System zdalnego sterowania wykorzystuje kontroler pistoletowy i ma zasięg ponad 80 metrów. Dodatkowo sygnał zdalnego sterowania działa na częstotliwości 2,4G z funkcją zapobiegania zakłóceniom, umożliwiając jednoczesną pracę wielu pojazdów na tej samej platformie.

Pakiet zawiera: cewkę akcesoryjną, akumulator *1 , kabel ładujący *1, wymiary produktu to 11 cm x 23 cm x 30 cm, a skala to 1/16.





Related Collections