RCDrone T5001-10 i TS5001-10 1N.m bezszczotkowy serwomotor przegubowy FOC, podwójny enkoder, RS485/CAN, przekładnia 1:10, serwomechanizm do robotyki
RCDrone T5001-10 i TS5001-10 1N.m bezszczotkowy serwomotor przegubowy FOC, podwójny enkoder, RS485/CAN, przekładnia 1:10, serwomechanizm do robotyki
RCDrone
Nie można załadować gotowości do odbioru
Przegląd
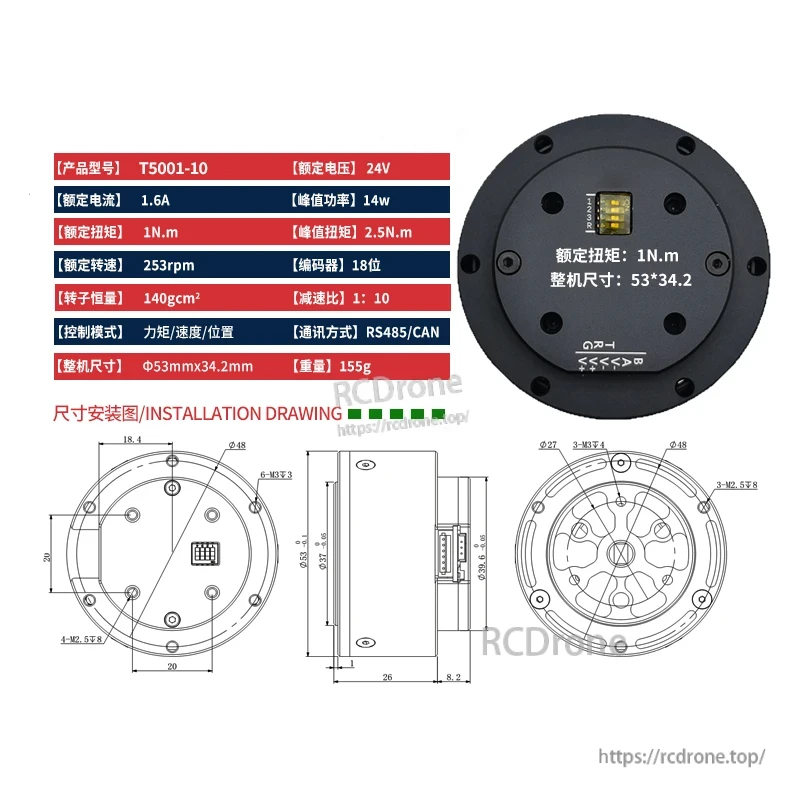
Moduły silników RCDrone T5001-10 i TS5001-10 to kompaktowe, wysokowydajne silniki serwo z bezszczotkowym napędem MIT, zaprojektowane do zaawansowanych zastosowań robotycznych. Oferują moment obrotowy nominalny 1N·m, szczytowy moment obrotowy 2.5N·m, nominalną prędkość 253–255 rpm oraz redukcję planetarną 1:10, te moduły serwo zapewniają wysoką moc, duży moment obrotowy i wysoką precyzję w lekkiej formie. Wyposażone w podwójny enkoder absolutny 18-bitowy (T5001-10) lub 18-bitowy + 14-bitowy (TS5001-10), zapewniają precyzyjne informacje zwrotne o położeniu z jednorazową kalibracją i ustawieniem punktu zerowego. Komunikacja jest wspierana przez interfejs RS485/CAN, co zapewnia niezawodne przesyłanie danych dla systemów sterowania robotyką.
Kluczowe cechy
-
Wysoka precyzja informacji zwrotnej – projekt z 18-bitowym lub podwójnym enkoderem dla dokładnej kontroli ruchu.
-
Wysoka gęstość momentu obrotowego – moment obrotowy 1N·m, szczytowy moment obrotowy 2.5N·m, kompaktowa obudowa Φ53mm.
-
Kontrola FOC – Kontrola zorientowana na pole dla płynnej i efektywnej pracy.
-
Wielokrotne tryby kontroli – kontrola momentu, prędkości i pozycji.
-
Komunikacja przemysłowa – RS485/CAN z obsługą UART dla elastycznej integracji.
-
Trwała konstrukcja – zaprojektowana do zastosowań w robotyce, zapewniająca stabilność w długoterminowej pracy.
-
Lekka i kompaktowa – tylko 155g (T5001-10) lub 183g (TS5001-10), idealna do projektów o ograniczonej przestrzeni.
Specyfikacje techniczne
| Model | T5001-10 | TS5001-10 |
|---|---|---|
| Napięcie znamionowe | 24V | 24V |
| Prąd znamionowy | 1.6A | 1.6A |
| Moc szczytowa | 14W | 14W |
| Moment obrotowy znamionowy | 1N·m | 1N·m |
| Moment obrotowy szczytowy | 2.5N·m | 2.5N·m |
| Prędkość nominalna | 253obr/min | 255obr/min |
| Enkoder | 18-bitowy absolutny | 18-bitowy + 14-bitowy absolutny |
| Bezładność wirnika | 140g·cm² | 140g·cm² |
| Przełożenie | 1:10 planetarne | 1:10 planetarne |
| Tryby sterowania | Moment / Prędkość / Pozycja | Moment / Prędkość / Pozycja |
| Komunikacja | RS485 / CAN | RS485 / CAN |
| Wymiary | Φ53 × 34.2mm | Φ53 × 36mm |
| Waga | 155g | 183g |
Definicja interfejsu
| Pin | Funkcja |
|---|---|
| A/H | RS485-A lub CAN-H |
| B/L | RS485-B lub CAN-L |
| V- | Ujemne zasilanie |
| V+ | Dodatnie zasilanie |
| T | Nadajnik UART |
| R | Odbiornik UART |
| G | GND sygnałowy |
Zastosowania
-
Roboty kroczące – Stabilna kontrola ruchu dla czworonogów i humanoidów.
-
Roboty przemysłowe – Wysokoprecyzyjne serwonapędy dla ramion robotów.
-
Roboty patrolowe – Niezawodne jednostki napędowe dla autonomicznych platform mobilnych.
-
Roboty medyczne – Lekkie i precyzyjne dla egzoszkieletów i urządzeń rehabilitacyjnych.
Szczegóły



Related Collections