




ROBOTERA XHAND 1 Ręka Robota - 12 DoF, dotykowe opuszki 270°, chwyt 80N, udźwig 25 kg, EtherCAT/RS485, gotowa do ROS
ROBOTERA XHAND 1 Ręka Robota - 12 DoF, dotykowe opuszki 270°, chwyt 80N, udźwig 25 kg, EtherCAT/RS485, gotowa do ROS
ROBOTERA
Nie można załadować gotowości do odbioru
Przegląd
ROBOTERA XHAND 1 to robotyczna ręka z pięcioma palcami, wyposażona w pełne moduły stawowe z bezpośrednim napędem i 12 aktywnymi stopniami swobody (DoF). Ręka ma rozmiar zbliżony do ludzkiej (191 mm x 94 mm x 47 mm) i została zaprojektowana do zręcznego manipulowania z wysokiej rozdzielczości czujnikami dotykowymi, mocnym uchwytem oraz interfejsami przyjaznymi dla deweloperów do badań i integracji w robotyce.
Kluczowe cechy
- Pełna architektura z bezpośrednim napędem z zintegrowanymi modułami stawowymi napędzanymi przekładnią, kontrolowanymi siłą (3 w kciuku; 9 w pozostałych czterech palcach).
- 12 w pełni aktywnych DoF; boczne wychylenie palca wskazującego +/-15° do złożonej manipulacji w dłoni.
- Wysoka wydajność chwytu: siła na końcówce palca 15N; maksymalna siła chwytu 80N; maksymalna waga chwytu do 25 Kg (dłoń w górę) i 16 Kg (dłoń w lewo).
- Wysokiej prędkości aktywacja wspierająca >2Hz powtórzenia otwierania/zamykania; udowodnione klikanie palców do 10 CPS (kliknięć na sekundę).
- 270° pokrycie dotykowe na końcówkach palców z pięcioma trójwymiarowymi czujnikami dotykowymi; rozdzielczość całej dłoni 12x10 na końcówkę palca x 5.
- Trójwymiarowe wykrywanie siły, w tym siły styczne (X i Y); dokładność powtarzalności pozycji końcówki palca +/-0,20 mm.
- Możliwość napędu wstecznego z tłumieniem <= 0,1 Nm; kontrola siły w pętli prądowej i kontrola siły-pozycji dla zgodnej interakcji.
- Łatwe połączenie dla deweloperów: EtherCAT i RS485 (USB); kompatybilne z ROS1/ROS2, Ubuntu (Linux), architekturami x86 i ARM, TwinCAT oraz powszechnymi ramionami robotycznymi (w tym xARM, Realman, UR).
- Trwałość oceniana na 1 000 000 cykli chwytania bez obciążenia; temperatura pracy -20°C ~ 60°C.
W przypadku zapytań, wsparcia w integracji lub zakupu hurtowego, skontaktuj się [email protected] or odwiedź https://rcdrone.top/.
Specyfikacje
| Parametr | Wartość |
|---|---|
| Waga | 1100 g |
| Wymiary (D x S x W) | 191 mm x 94 mm x 47 mm (Rozmiar dorosłej ręki) |
| Aktywne DoF (Całkowite) | 12 |
| Pasywne DOF (Całkowite) | 0 |
| Przydział DoF | Kciuk x 3; Palec wskazujący x 3; Palec środkowy x 2; Palec serdeczny x 2; Palec mały x 2 |
| Aktywacja/Transmisja kciuka | 3 moduły stawowe z napędem zębatym i kontrolą siły |
| Aktywacja/Transmisja czterech palców | 9 modułów stawowych z napędem zębatym i kontrolą siły |
| Konfiguracja opuszków palców | Okrągłe lub zaokrąglone opuszki palców |
| Ruch boczny | -15°~+15° (Wskazujący) | Dokładność pozycjonowania powtarzalnego na końcówkach palców | +/− 0.20 mm |
| Tryby kontroli | Kontrola pozycji (niska tłumienie/wysoka tłumienie), kontrola siły w pętli prądowej, kontrola siły-pozycji |
| Siła na końcówkach palców | 15N |
| Maksymalna siła chwytu (cała dłoń) | 80N |
| Maksymalna waga chwytu (dłoń w lewo) | 16 Kg |
| Maksymalna waga chwytu (dłoń w górę) | 25 Kg |
| Najdalsza opozycja kciuka | Mały palec |
| Prędkość powtarzania otwierania/zamykania | >2Hz |
| Tłumienie wsteczne (możliwość wstecznego napędu) | <= 0.1 Nm |
| Pokrycie dotykowe | 270° pięciopalczaste otoczenie czubków palców |
| Liczba czujników dotykowych | Pięć 270° trójwymiarowych czujników dotykowych na pięciu czubkach palców |
| Rozdzielczość dotykowa (cała dłoń) | 12x10 (270° otoczenie na czubek palca) x 5 |
| Wymiary czujników dotykowych | Trójwymiarowe czujniki siły (w tym siły styczne X i Y) |
| Częstotliwość kontroli całej dłoni | 83Hz |
| Prędkość komunikacji | EtherCAT: 100MHz; RS485: 3MHz |
| Parametry czujników | Czubki palców: 120 trójwymiarowych sił profilujących; Stawy: pozycja, prędkość, temperatura, prąd (moment obrotowy) |
| Parametry kontroli | Pozycja stawu; moment obrotowy stawu; współczynnik sztywności stawu; współczynnik tłumienia stawu |
| Cykle chwytania bez obciążenia | 1 000 000 cykli |
| Zakres temperatury pracy | -20°C ~ 60°C |
| Napięcie robocze | 24V ~ 72V |
| Prąd statyczny | 0.15A @48V, 7W |
| Maksymalne natężenie | 2.5A @48V, 120W |
| Interfejs komunikacyjny | RS485 (USB), EtherCAT |
Aplikacje
- Teleoperacja: wspiera teleoperację MR i rękawic; teleoperacja Vision Pro; rękawice Manus; Pico/Meta Quest.
- Integracja ramienia robota i humanoida: kompatybilne z xARM, Realman, UR i innymi ramionami robotów.
- Badania i symulacja: precyzyjny URDF, symulacja czucia dotykowego; odpowiednie do uczenia ze wzmocnieniem z Isaac Gym i Mujoco.
- Interakcja człowiek-maszyna i obsługa narzędzi ludzkich z kontrolą siły zgodnej.
Podręczniki
Xhand_adapter.stp
MH2.25_right_stp.zip
MH2.25_left_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Product_Manual_1.0.pdf
X-Hand_1_User_Quick_Start_Instructions_1.0.pdf
Szczegóły

ROBOTERA XHAND1 ręka robotyczna z pełnym napędem bezpośrednim, oferująca prawdziwą swobodę i zaawansowaną zręczność.

XHAND1 od ROBOTERA: humanoidalna ręka z pięcioma palcami z 12 stopniami swobody, 270° czujników dotykowych na końcówkę palca, siła chwytu 80N, nośność 25kg. Zaprojektowana do skomplikowanych zadań i obsługi narzędzi.

XHAND 1: Pierwsza zręczna ręka z modułami napędu bezpośredniego na każdy staw. Posiada silniki bezprzewodowe o dużej mocy, reduktory o niskim tłumieniu, precyzyjne enkodery oraz opracowane we własnym zakresie zintegrowane moduły stawowe do zaawansowanej manipulacji robotycznej.
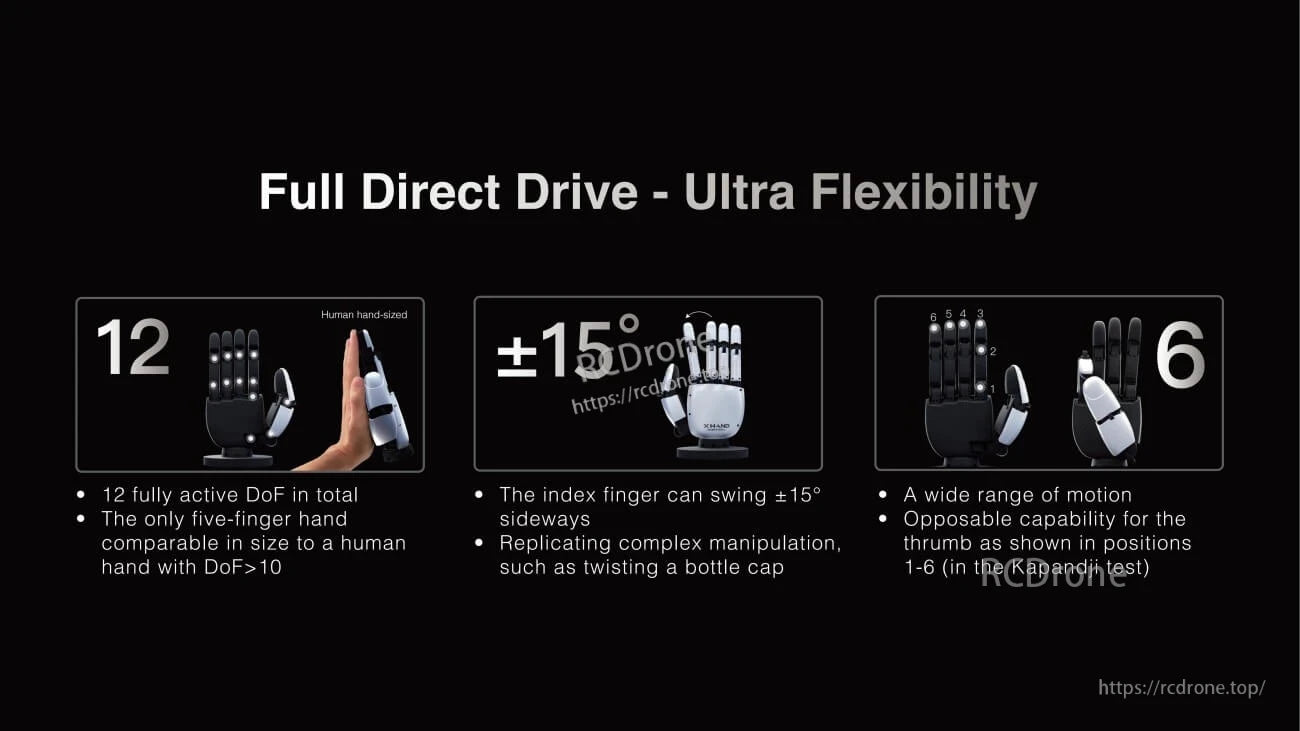
ROBOTERA XHAND 1 to ultraelastyczna, robotyczna ręka w rozmiarze ludzkim z 12 aktywnymi stopniami swobody. Jej palec wskazujący porusza się ±15° na boki do skomplikowanych zadań, a kciuk oferuje sześć przeciwstawnych pozycji do wszechstronnej manipulacji.

ROBOTERA XHAND 1: 25 kg obciążenia, 80 N siły chwytu, pełny napęd bezpośredni, przewyższa podobne rozwiązania oparte na połączeniach/ścięgnach.

Robotyczna ręka z pełnym napędem bezpośrednim osiąga 10 CPS z prędkością napędu zębatkowego, moment obrotowy powyżej 1 Nm, przewyższając systemy oparte na połączeniach i ścięgnach dla lepszej wydajności w grach.

ROBOTERA XHAND 1 ma czujniki na końcówkach palców o kącie 270° z >100 punktami i dokładnością 0,05 N dla 3D siły, dotyku i pomiaru temperatury, zapewniając doskonałą wydajność chwytu.
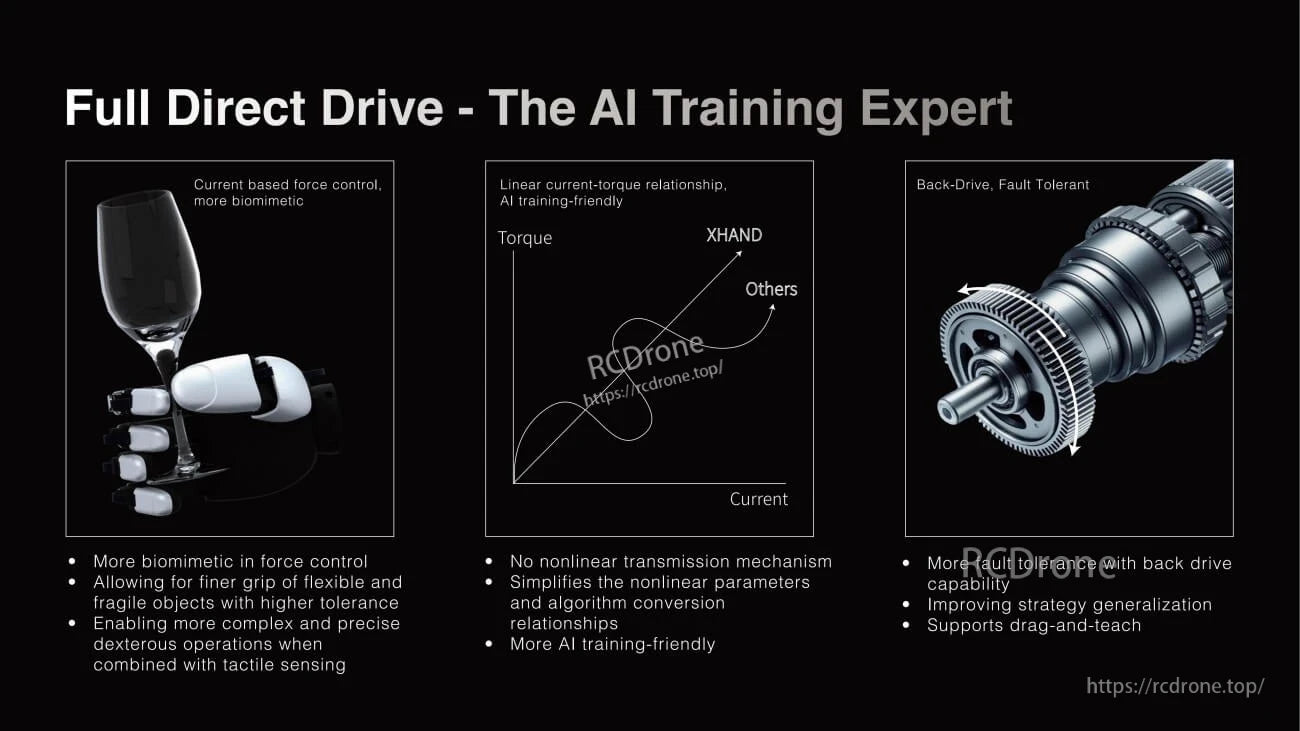
ROBOTERA XHAND 1 oferuje biomimetyczną kontrolę siły, liniową odpowiedź momentu obrotowego na prąd dla treningu AI oraz tolerancję na błędy wstecznego napędu - umożliwiając precyzyjne manipulowanie, uproszczone algorytmy, wsparcie drag-and-teach oraz poprawioną generalizację strategii.
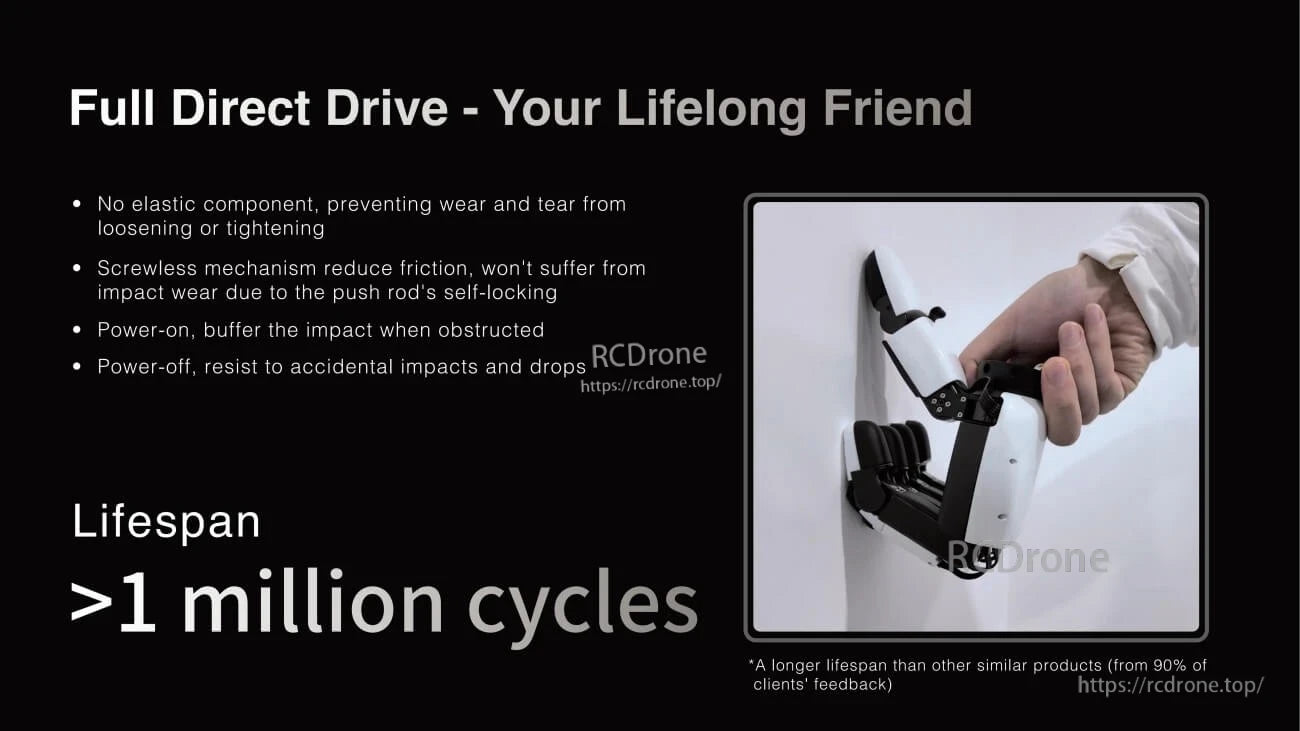
Pełny robotyczny chwytak z napędem bezpośrednim oferuje trwałość bez elastycznych części lub śrub, amortyzację uderzeń podczas włączania, odporność na upadki, gdy jest wyłączony, oraz żywotność przekraczającą milion cykli — przewyższając podobne produkty według opinii klientów.

ROBOTERA XHAND 1 wspiera teleoperację MR i rękawic, jest kompatybilny z ROS1/ROS2 oraz Ubuntu na x64/ARM. Oferuje EtherCAT/TwinCAT/RS485 do integracji z xARM, Realman, ramionami robotycznymi UR. Zapewnia precyzyjne modelowanie URDF i symulację czujników dotykowych. Zaprojektowany z myślą o aplikacjach robotycznych przyjaznych dla deweloperów, z elastycznością międzyplatformową i zaawansowanymi protokołami sterowania.
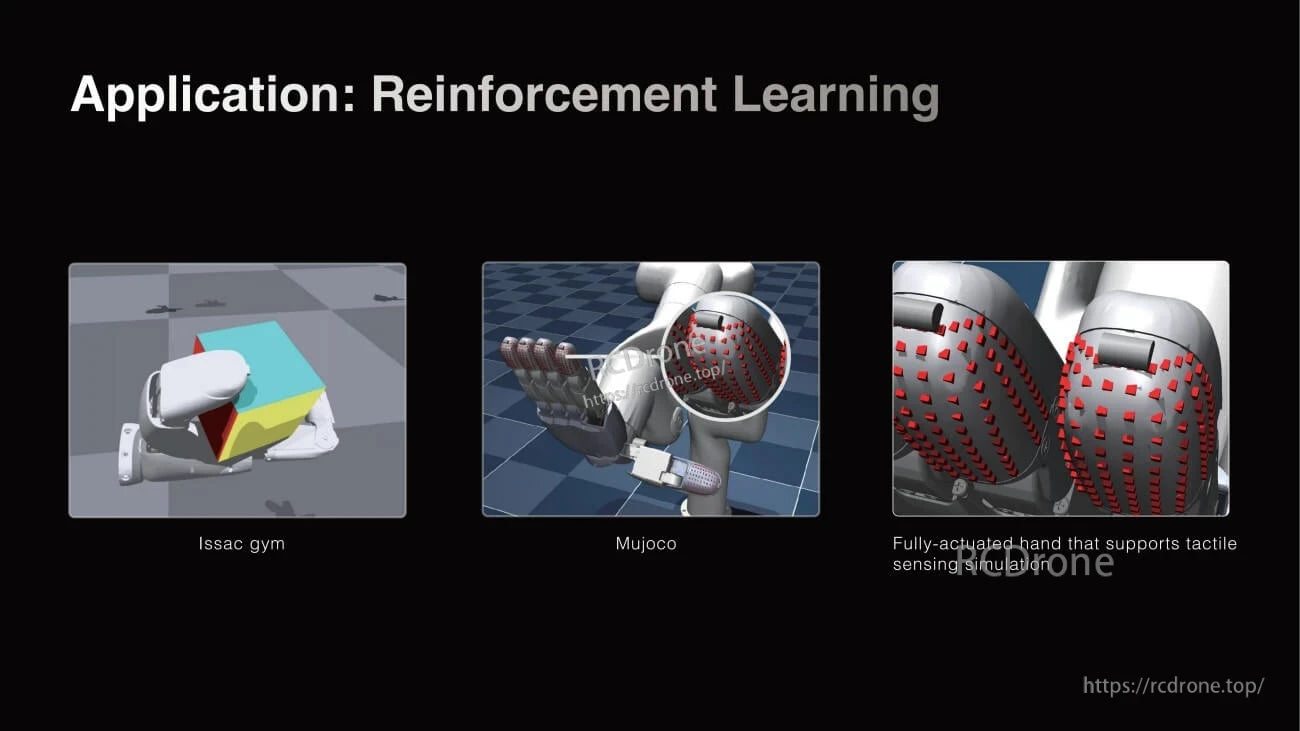
Zastosowania uczenia przez wzmocnienie: Issac gym, Mujoco oraz w pełni aktywowany chwytak z symulacją czujników dotykowych do zaawansowanego sterowania robotami i środowisk treningowych.
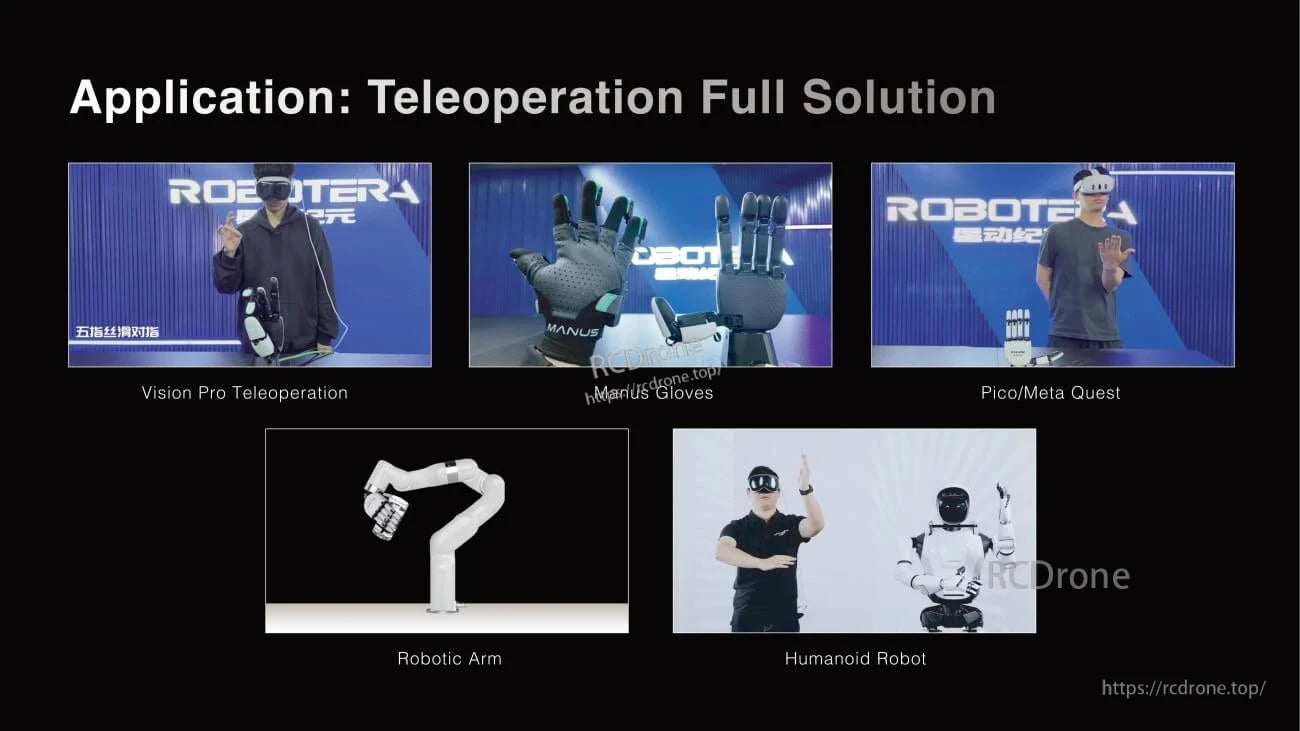
Kompleksowe rozwiązanie teleoperacyjne z Vision Pro, rękawicami Manus, Pico/Meta Quest, ramieniem robota i robotem humanoidalnym do zaawansowanego zdalnego sterowania.
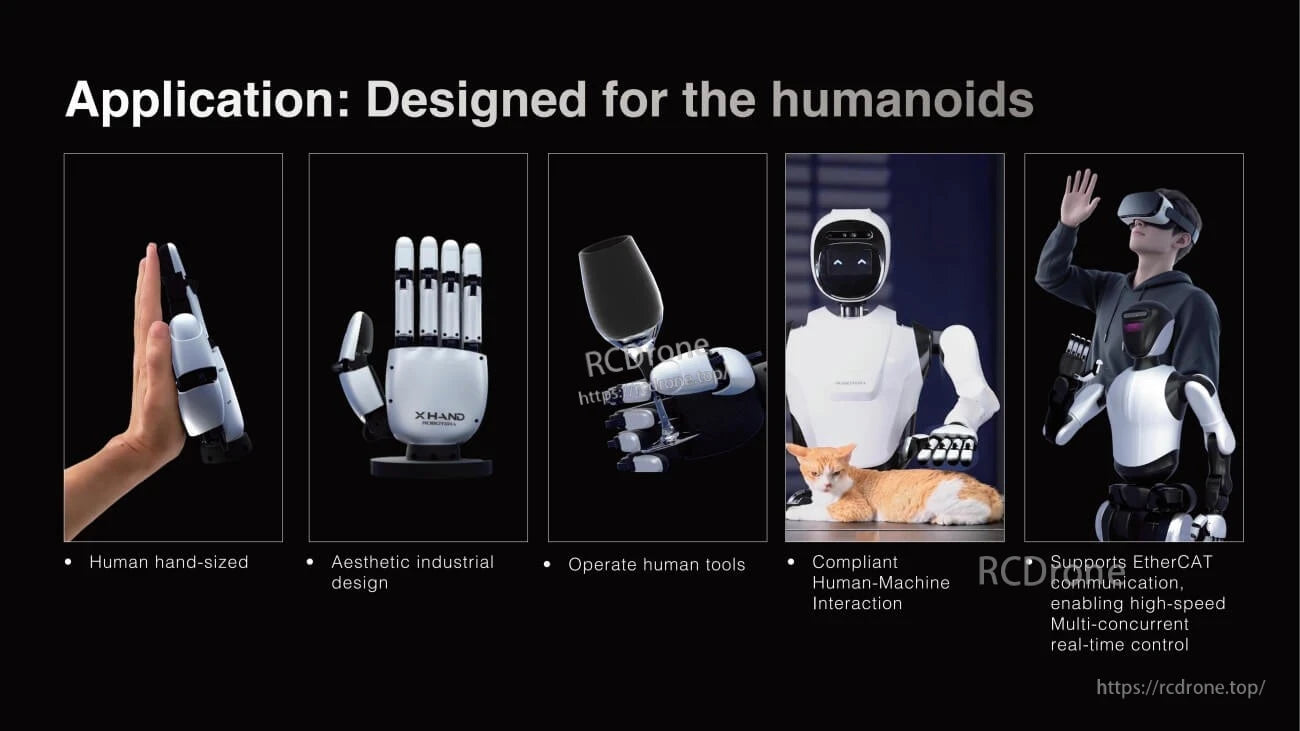
Ręka robota w rozmiarze człowieka o estetycznym designie, obsługująca narzędzia, umożliwiająca zgodną interakcję, wspierająca EtherCAT dla sterowania w czasie rzeczywistym.
Related Collections




