



Programowalny dron S2-F290 - Pixwawk Open Source ROS SLAM AI Poziom wtórny rozwoju przemysłowego dla dronów Challenge
Programowalny dron S2-F290 - Pixwawk Open Source ROS SLAM AI Poziom wtórny rozwoju przemysłowego dla dronów Challenge
RCDrone
Nie można załadować gotowości do odbioru
Przegląd
Ten Dron programowalny S2-F290 jest wysokowydajny dron klasy przemysłowej zaprojektowany do rozwoju wtórnego i wyzwań związanych z dronami. Posiada ładowność 2400g, A Bateria 6S 6000mAhi maksymalna odległość sterowania 10 km, zapewnia precyzję dzięki Dokładność pozycjonowania GPS ≈1–2m I odporność na wiatr na poziomie 3–4. Zasilany przez Kontroler lotu Pixhawk 2.4.8 z technologia ROS SLAM typu open sourceDron obsługuje zaawansowane funkcje takie jak: Mapowanie 3D LiDAR, rozpoznawanie obiektów na podstawie YOLO i loty w formacji. Jego Rama z włókna węglowego 3mm zapewnia wyjątkową trwałość i stabilność, testowaną w ekstremalnych warunkach. Platforma jest wysoce konfigurowalna, oferując funkcje takie jak chińsko-angielska obsługa stacji naziemnej QGC, modułowa rozszerzalność i kompleksowe samouczki, co czyni ją idealną do zastosowań badawczych, konkursowych i rozwojowych.
Specyfikacja
Samolot
| Parametr | Specyfikacja |
|---|---|
| Nazwa | Dron programowalny S2-F290 |
| Masa ładunku | 2400g |
| Model | S2-F290 |
| Dokładność pozycjonowania GPS | ≈1–2m |
| Rozstaw osi | 290 mm |
| Maksymalna masa startowa | 3190g |
| Bateria | 6S Standardowa bateria 6000mAh |
| Kontrola odległości | 10 km (zalecane w promieniu 1000 m) |
| Odporność na wiatr | Poziom 3–4 |
| Środowisko operacyjne | Wewnątrz/na zewnątrz |
| Wyniki testu wytrzymałościowego | Bliższe dane |
|---|---|
| Śmigła | 7 cali |
| Pojemność baterii | 6S 6000mAh (użyto 5300mAh) |
| Środowisko | Bezwietrzny |
| Czas lotu | 11 minut 30 sekund |
Kontroler lotu
| Część | Specyfikacja |
|---|---|
| Procesor FMU | STM32H743 Cortex-M7, 480MHz, 2MB Flash, 1MB SRAM |
| Procesor IO | STM32F103 Cortex-M3, 72MHz, 64KB pamięci SRAM |
| Czujniki | Akcelerometr/żyroskop: ICM-42688-P |
| Akcelerometr/żyroskop: BMI055 | |
| Magnetometr: IST8310 | |
| Barometr: MS5611 | |
| Napięcie znamionowe | Maksymalne napięcie wejściowe: 6V |
| Wejście zasilania USB: 4,75-5,25 V | |
| Wejście serwa: 0-36V | |
| Prąd znamionowy | Telemetria 1 Maksymalny prąd wyjściowy: 1A |
| Łączny prąd dla pozostałych portów: 1A | |
| Dane mechaniczne | Wymiary: 53,3 × 39 × 16,2 mm |
| Waga: 39.2g | |
| Porty | - 14 wyjść PWM (8 z IO, 6 z FMU) |
| - 2 porty szeregowe ogólnego przeznaczenia | |
| - 2 porty GPS | |
| - 1 port I2C | |
| - 2 porty CAN | |
| - Wejście RC dla Spektrum/DSM, S.BUS, CPPM, itp. | |
| - Port wejściowy zasilania | |
| Inne funkcje | Temperatura pracy: -40–85°C |
Komputer pokładowy
| Część | Specyfikacja |
|---|---|
| Moc obliczeniowa | 40 NAJLEPSZYCH |
| Procesor graficzny | 32 rdzenie Tensor z 1024-rdzeniowym procesorem graficznym NVIDIA Ampere |
| Procesor | 6-rdzeniowy Arm Cortex-A78AE v8.2 64-bit, 1,5 GHz |
| BARAN | 8 GB 128-bitowy LPDDR5 68 GB/s |
| Składowanie | Karta SD lub zewnętrzna NVMe |
| Maksymalna częstotliwość procesora | 1,5 GHz |
Pilot zdalnego sterowania
| Część | Specyfikacja |
|---|---|
| Napięcie robocze | 4,2 V |
| Prąd roboczy | 100mA |
| Pasmo częstotliwości | 2,4–2,483 GHz |
| Waga | 525g |
| Wymiary | 130 × 150 × 20 mm |
| Czas pracy baterii | 20 godzin |
| Port ładowania | MICRO-USB |
| Zakres sterowania | 7KM |
GPS
| Część | Specyfikacja |
|---|---|
| Odbiornik satelitarny | UBLOX-M9, 92 kanały |
| Kompas elektroniczny | QMC5883L |
| Systemy satelitarne | GPS L1 C/A, GLONASS L1OF, BeiDou B1, Galileo E1 |
| Kanały satelitarne | 32 |
| Aktualizuj częstotliwość | 25 Hz |
| Dokładność pozycjonowania | 1,5 m CEP (idealne środowisko) |
| Czas uruchomienia | Zimny start: 24 sek., Gorący start: 1 sek. |
| Wymiary | Wymiary: 25 × 25 × 8 mm |
| Waga | 12g |
Bateria
| Część | Specyfikacja |
|---|---|
| Typ złącza | XT60 |
| Zalecany prąd ładowania | 3–5A |
| Pojemność baterii | 6000mAh |
| Napięcie znamionowe | 22.2V |
| Szybkość rozładowania | 75 stopni Celsjusza |
| Wymiary | Wymiary: 50 × 44 × 158 mm |
| Waga | 816g |
LiDAR
| Część | Specyfikacja |
|---|---|
| Długość fali lasera | 905nm |
| Zakres | 40 m przy współczynniku odbicia 10%, 70 m przy współczynniku odbicia 80% |
| Minimalny obszar wykrywania | 0,1 mln |
| Pole widzenia | Poziomo: 360°, Pionowo: -7° do 52° |
| Wyjście chmury punktów | 200 000 punktów na sekundę |
| Współczynnik punktów | 10Hz |
| Poziom ochrony | IP67 |
| Moc | 6,5 W (temperatura otoczenia 25°C) |
| Zakres napięcia | 9–27 V prądu stałego |
| Wymiary | Wymiary 65×65×60 mm |
| Waga | 265g |
Kamera głębinowa
| Część | Specyfikacja |
|---|---|
| Technologia głębi | Podwójna podczerwień |
| Głębokość Kąt widzenia | 87° × 58° (poziomo × pionowo) |
| Rozdzielczość głębi | 1280 × 720 |
| Dokładność głębokości | <2% w promieniu 2 m |
| Głębia Częstotliwość klatek | 90 klatek na sekundę |
| Zakres głębokości | 0,3–3m |
| Wymiary | Wymiary: 90×25×25 mm |
| Środowisko operacyjne | Wewnątrz/na zewnątrz |
Aparat jednoobiektywowy
| Część | Specyfikacja |
|---|---|
| Maksymalna rozdzielczość | 2MP (1920 × 1080) |
| Maksymalna liczba klatek na sekundę | 30 klatek na sekundę |
| Pole widzenia | ~90° |
| Długość kabla | ~1.5m |
| Wymiary | Wymiary 35×35×30 mm |
Tabela funkcji
| namaszczenie | Podstawowa konfiguracja | Opcjonalny D435 | Opcjonalny moduł D435 + 4G |
|---|---|---|---|
| Utrzymywanie wysokości, zawisanie, powrót do domu | ✔ | ✔ | ✔ |
| Lądowanie, stabilizacja, lot na punkt nawigacyjny | ✔ | ✔ | ✔ |
| Lot zdalnie sterowany | ✔ | ✔ | ✔ |
| Komunikacja między kontrolerem lotu a komputerem pokładowym | ✔ | ✔ | ✔ |
| Rozpoznawanie kodów QR i lądowanie | ✔ | ✔ | ✔ |
| Rozpoznawanie i upuszczanie obiektów | ✔ | ✔ | ✔ |
| Jednoczesne mapowanie i omijanie przeszkód | ✔ | ✔ | ✔ |
| Mapowanie i pozycjonowanie 3D LiDAR | ✔ | ✔ | ✔ |
| Rozpoznawanie obiektów oparte na YOLO | ✘ | ✔ | ✔ |
| Rozpoznawanie i śledzenie obiektów | ✘ | ✔ | ✔ |
| Zdalne sterowanie 4G | ✘ | ✘ | ✔ |
Zawartość pakietu
Podstawowa konfiguracja
- Rama: Rama z włókna węglowego F290
- Silniki: 4× silnik T F100 Kv1100
- ESC: 4× FlyFun T-rex 5 45A
- Śmigła: 4× 7-calowe śmigła trójłopatkowe
- Kontroler lotu: Pixhawk6mini
- Bateria: : 6S Standardowa bateria 6000mAh
- Rumak:Ładowarka akumulatorów 6S
- Komputer pokładowy: Jetson Orin Nano 8G + moduł WIFI
- Dysk SSD: 256G
- LiDAR:Livox MID360
- Kamera: 150° Szerokokątna kamera USB
- Pilot zdalnego sterowania:Cloud T10 (zawiera odbiornik danych)
Opcjonalna konfiguracja: D435
Zawiera wszystkie komponenty z Podstawowa konfiguracja, a także:
- Aparat z podwójnym obiektywem:D435
Opcjonalna konfiguracja: D435 + moduł 4G
Zawiera wszystkie komponenty z Podstawowy Konfiguracja, a także:
- Aparat z podwójnym obiektywem:D435
- Moduł 4G
Bliższe dane
Dron programowalny S2-F290
- ✔ Wsparcie techniczne, bezproblemowa obsługa posprzedażowa
- ✔ Zawiera przykłady konkurencji, które można dostosować
- ✔ Chińsko-angielska stacja naziemna mobilna
- ✔ Wysoka stabilność, wysoka wydajność
- ✔ Wewnątrz/na zewnątrz
S2-F290 to najnowocześniejszy dron stworzony z myślą o wyścigach dronów, specjalizujący się w eksploracji i innowacjach.Zaprojektowano go z myślą o połączeniu zaawansowanej technologii i nieograniczonej kreatywności. Jest w stanie przystosować się do pracy w różnych złożonych środowiskach, czyniąc eksplorację powietrzną bardziej dostępną i skuteczną.
Ten dron charakteryzuje się kompaktową konstrukcją i ogromną mocą. Oferuje bogactwo przykładów konkurencji, pozwalając użytkownikom na szybkie opanowanie i optymalizację jego wydajności. Wyposażony w dedykowaną chińsko-angielską mobilną stację naziemną, znacznie zwiększa wygodę obsługi drona. Ponadto zapewnia konkurencyjne wyjaśnienia kodu źródłowego i możliwość dostosowywania, aby zapewnić użytkownikom możliwość osiągnięcia pożądanych funkcjonalności w najkrótszym czasie, jednocześnie wyróżniając się w scenariuszach konkurencyjnych.

Zaspokajanie potrzeb rozwoju / konkurencji / badań
| Kategoria | Bliższe dane |
|---|---|
| Podstawowa wiedza ROS | - Zdalne sterowanie |
| - Komunikacja pomiędzy kontrolerem lotu a komputerem pokładowym | |
| Podstawowe funkcje | - Planowanie trasy |
| - Rozpoznawanie i pozycjonowanie kodów QR | |
| - Autonomiczny patrol poza pokładem | |
| Funkcje zaawansowane | - Rozpoznawanie kodów QR na potrzeby lądowania |
| - Rozpoznawanie i upuszczanie obiektów | |
| - Jednoczesne mapowanie i omijanie przeszkód | |
| - Mapowanie i pozycjonowanie 3D LiDAR | |
| - Rozpoznawanie obiektów oparte na YOLO | |
| - Transmisja wideo oparta na sieci Web | |
| - Loty w formacji na zewnątrz | |
| - Formacja Współpracy Lądowo-Powietrznej | |
| Opcjonalne funkcje aparatu D435 | - Pozycjonowanie wizualne VINS |
| - Rozpoznawanie i śledzenie obiektów oparte na YOLO | |
| Opcjonalne funkcje komunikacji 4G | - Zdalne sterowanie 4G |
Autonomiczne unikanie przeszkód, kompleksowe zapewnienie bezpieczeństwa
Wykorzystując 3D LiDAR do autonomicznego unikania przeszkód, dron łączy globalne planowanie trasy z lokalnym dynamicznym unikaniem przeszkód, aby precyzyjnie wykrywać przeszkody ze wszystkich kierunków. Obsługuje automatyczne zatrzymywanie, a także ciągły lot, umożliwiając elastyczne unikanie obiektów na trasie lotu, zapewniając bezpieczniejsze wrażenia z lotu.

Rozpoznawanie kodów QR i lądowanie
Dron aktywuje kamerę i moduł rozpoznawania kodu QR, aby uzyskać informacje o położeniu kodu QR w czasie rzeczywistym. Podczas opadania dron dynamicznie dostosowuje swoją pozycję, zapewniając precyzyjne wyrównanie z polem widzenia kamery przed przystąpieniem do lądowania.
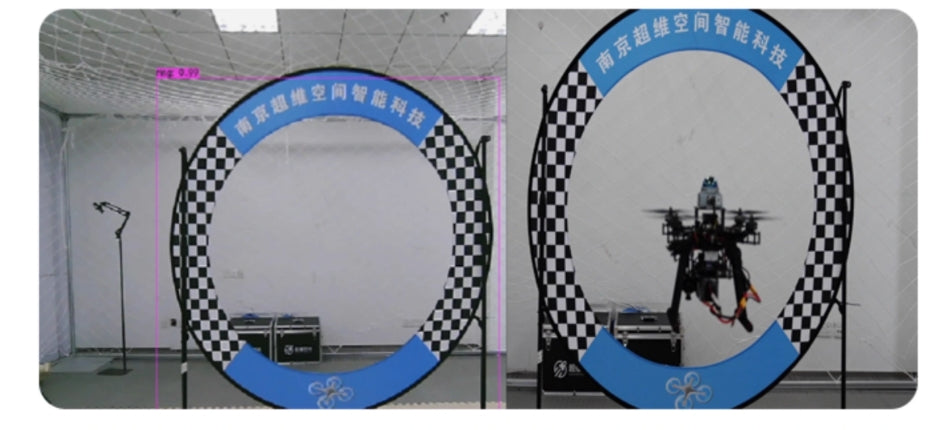
Rozpoznawanie obiektów YOLO
Dron wykorzystuje YOLOv8 do rozpoznawania obiektów, pozyskując informacje o położeniu ramki kołowej w czasie rzeczywistym. Autonomicznie dostosowuje swoją pozycję i nawiguje przez ramkę kołową.
Loty w formacji na zewnątrz
Dron wykorzystuje technologię formowania roju, umożliwiającą skoordynowaną kontrolę wielu dronów w celu uzyskania lotu w szyku.Wykorzystując zaawansowane algorytmy komunikacji i sterowania zespołowego, umożliwia komunikację w czasie rzeczywistym i wymianę informacji między dronami, synchronizując ich ruchy i pozycje w celu utworzenia zwartej formacji.

Formacja współpracy lądowo-powietrznej
Ta platforma obsługuje formację współpracy między dronami lądowymi i powietrznymi. Wykorzystując sieć lokalną ze strukturami topologii do łączności urządzeń, wykorzystuje komunikację UDP i niestandardowe protokoły, aby zapewnić szybką i stabilną komunikację. Dzięki sterowaniu PID osiąga zsynchronizowane podążanie między głównym dronem a wieloma dronami podrzędnymi, zapewniając stabilność formacji i wydajność operacyjną.

Przykład konkursu
Zawiera ekskluzywne scenariusze konkursowe z instrukcjami krok po kroku, dzięki czemu uczestnicy mogą łatwo dostosować się do różnych typów konkursów.



Cechy programowalnego drona S2-F290
Wysoka wydajność kosztowa
- Przeznaczony dla początkujących, aby skrócić czas nauki i ułatwić opanowanie obsługi drona.
- Przystępna cena sprawia, że jest to idealne urządzenie do nauki dla studentów i pasjonatów.
Wysoka stabilność
- Testowano w różnych ekstremalnych warunkach przez okres trzech lat.
- Wyposażony w ramę z włókna węglowego o grubości 3 mm zapewniającą zwiększoną trwałość i stabilność.
- Umożliwia użytkownikom zdobycie uznania już w pierwszym doświadczeniu konkursowym.
Możliwość rozbudowy
- Obsługuje zaawansowaną personalizację dla różnych zastosowań.
- Kompatybilny z różnymi elementami rozszerzeń, co pozwala na ciągłą poprawę wydajności i funkcjonalności drona.
Bezproblemowa obsługa posprzedażowa
- Profesjonalny zespół zapewniający kompleksowe doradztwo i wsparcie.
- Oferuje bezpłatne naprawy uszkodzeń sprzętu spowodowanych błędami operacyjnymi w okresie gwarancyjnym (z wyłączeniem akcesoriów i baterii).
Możliwość dostosowania
- Zapewnia wsparcie dla wyłącznego rozwoju w ROS i QGC.
- Zapewnia wysoką dokładność mapowania i nawigacji na poziomie ponad 98%.
- Kompatybilny z modułami RTK/GPS, logotypami i różnymi unikalnymi funkcjonalnościami.

Konfiguracja stacji naziemnej
Korzystanie z kontrolera lotu Pixhawk 2.4.8
Wyposażony w najnowszy standardowy 32-bitowy procesor STM32F427 i barometr MS5611, ten kontroler lotu oferuje liczne interfejsy oraz wysoką wydajność i stosunek ceny do jakości jako rozwiązanie typu open source.
1. Ekskluzywna, głęboko spersonalizowana stacja naziemna QGC
- Osiąga ponad 98% lokalizacji na język chiński.
- Obsługuje zaawansowane funkcje, takie jak NTRIP.
2. Mobilna stacja naziemna QGC
- Udostępnia mobilną wersję stacji naziemnej QGC, umożliwiającą bezproblemową obsługę za pomocą smartfona.
3. Połączenie bezpośrednie Wi-Fi lub 4G
- Aby obsługiwać urządzenie za pomocą smartfona lub komputera, wystarczy połączyć się przez Wi-Fi.
- Notatka:System „ezuav” pokazuje, że jest połączony z urządzeniem, ale nie może zapewnić dostępu do Internetu.

Kompleksowe samouczki i w pełni otwarte zasoby
- Niezwykle szczegółowe samouczki dotyczące użytkowania, obejmujące wszystkie aspekty funkcjonalności drona S2-F290.
- Materiały w pełni udostępniane na zasadzie open source, w tym:
- Wprowadzenia do oprogramowania i przewodniki instalacji.
- Samouczki dotyczące podstawowych i zaawansowanych funkcji, takich jak rozpoznawanie obiektów w oparciu o OpenCV, mapowanie 3D i autonomiczny lot poza pokładem.
- Instrukcje dotyczące niestandardowego rozwoju komunikacji PX4 i MAVLink.
- Często zadawane pytania dotyczące rozwiązywania problemów, konfiguracji środowiska ROS i kroków operacyjnych.
Related Collections


