







Feetech STS3215 - 7,4 V 20 KG 360° 25 T Enkoder magnetyczny Serwo magistrali szeregowej Serwo wieloobrotowe Serwo o wysokiej precyzji w trybie krokowym
Feetech STS3215 - 7,4 V 20 KG 360° 25 T Enkoder magnetyczny Serwo magistrali szeregowej Serwo wieloobrotowe Serwo o wysokiej precyzji w trybie krokowym
Feetech
Nie można załadować gotowości do odbioru
Feetech STS3215 - 7.SPECYFIKACJA Serwa 4 V 20 KG 360°
Nazwa marki: Feetech
Pochodzenie: Chiny kontynentalne
Materiał: tworzywo sztuczne
Typ plastiku: PC
Części i akcesoria do zdalnie sterowanych pojazdów: Baterie — LiPo
Rozmiar: 10*10*10
Dla typu pojazdu: Samochody osobowe
Zastosowanie: Pojazdy i zabawki zdalnie sterowane
Uaktualnij części/akcesoria: Bateria litowa
Urządzenia peryferyjne/urządzenia do zdalnego sterowania: Pilot zdalnego sterowania
Materiały narzędziowe: Akumulator
Ilość: 1 szt.
Parametry techniczne: KV1100
Numer modelu: STS3215
Atrybuty napędu na cztery koła: Silniki
Rozstaw osi: Śruby
Numer modelu: STS3215
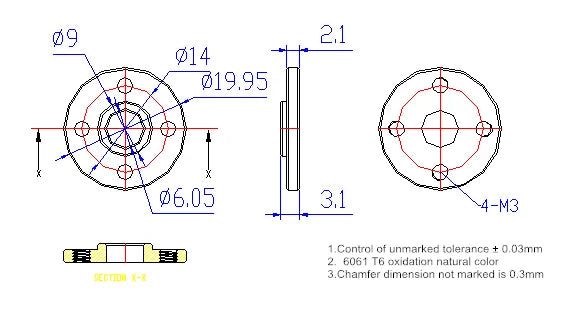
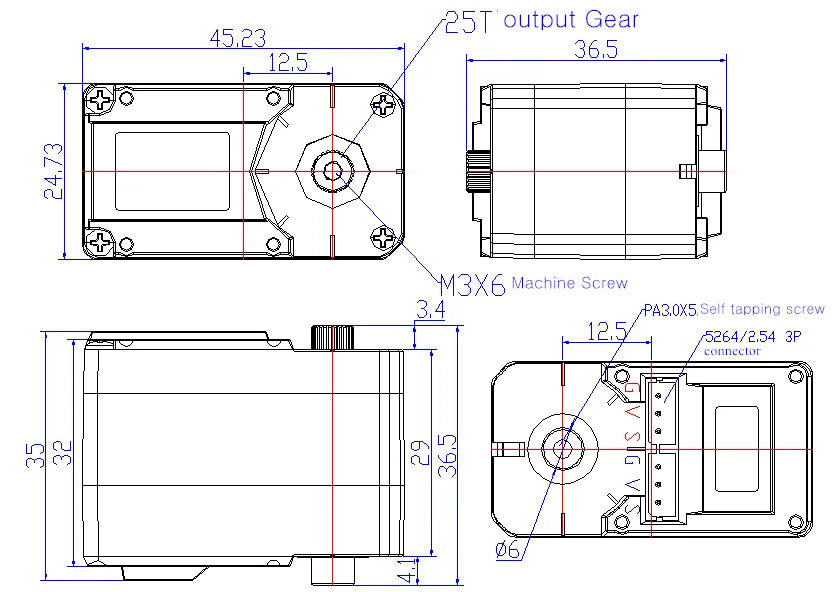
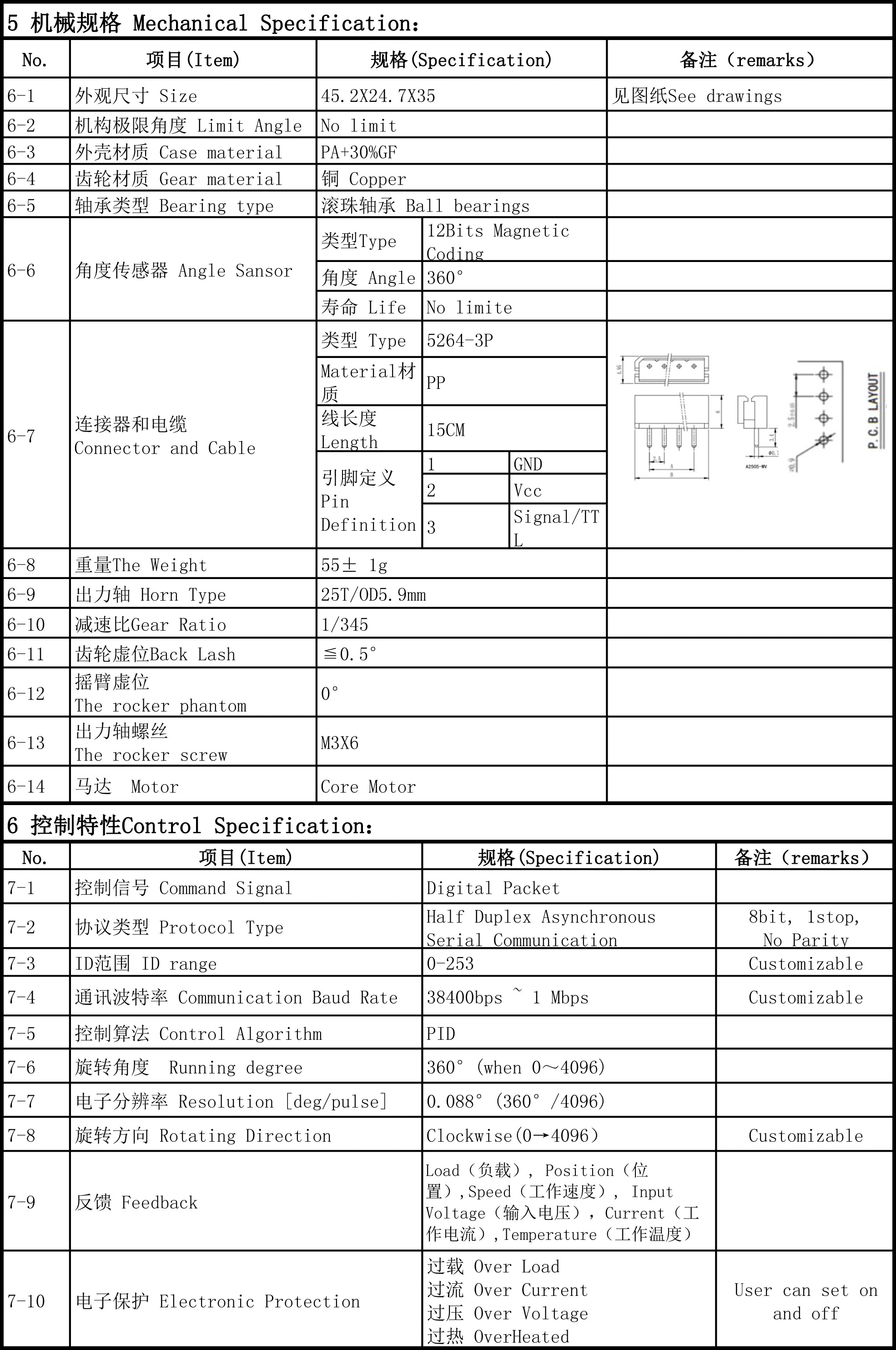
Rozmiar: 45.2X24.7 X 35 mm
Waga: 55± 1g
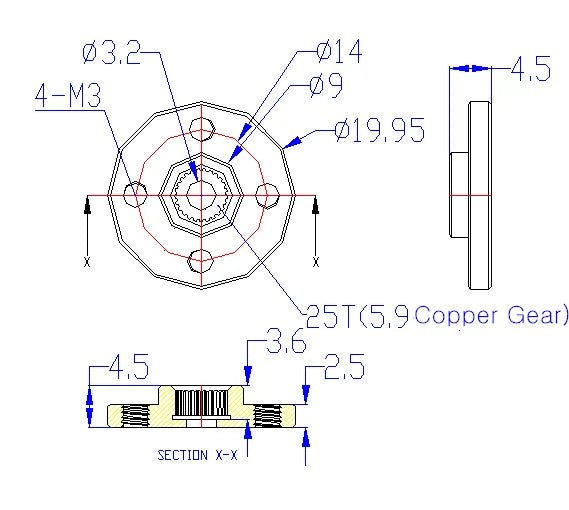
Typ przekładni: Miedź
Kąt graniczny: Limit NO
Łożysko: Łożyska kulkowe
Wypust przekładni tubowej: 25T
Silnik: Silnik bezrdzeniowy
Zakres napięcia roboczego: 6-7.4V
Szczytowy moment utyku: 19.5 kg.cm@6V
Moment znamionowy: 6.5 kg.cm@6V
Typ protokołu: Asynchroniczna komunikacja szeregowa półdupleksowa
|
Nazwa produktu
|
Feetech 2020 nowy produkt STS3215 enkoder magnetyczny 360° ocena serwa magistrali szeregowej
|
|
Rozmiar
|
45.2X24.7X35mm
|
|
Waga
|
55± 1g
|
|
Moment utyku
|
19.5 [email protected]
|
|
Prędkość przeciągnięcia
|
52 obr./[email protected]
|
|
Opinia
|
obciążenie / położenie / prędkość / napięcie / prąd / temperatura
|
|
Ochrona elektroniczna
|
zabezpieczenie przed przegrzaniem / przetężeniem / przepięciem / przeciążeniem
|
|
specjalizuje się w ODM i OEM
|
Y
|
|
Test życia
|
>100000
|
|
Silnik hałasuje
|
45±5dB
|
|
Odgłosy przekładni kierowniczej
|
60±5dB
|
|
Wodoodporność
|
Nie
|
|
Typ protokołu
|
Asynchroniczna komunikacja szeregowa półdupleksowa
|
-
Cechy konstrukcyjne:
-
W skorupie zastosowano plastikową powłokę o wyższej wytrzymałości, zoptymalizuj odległość środkową, bardziej zwartą ogólną konstrukcję, przekładnia serwa wykorzystuje kombinację przekładni z miedzi 1:345, wyższy moment obrotowy, przy tym samym momencie obrotowym, porównaj ze standardowym serwomechanizmem rozmiar, wygląda na niższy profil (5mm), Korpus przyjmuje konstrukcję dwuosiową, Charakterystyka strukturalna bryły wyłożonej kołem, Tryb okablowania podwójnych kabli wychodzących z metalowymi głównymi zastępczymi rogami serwa, Nadaje się do zastosowania w czworonożnym robocie, wężu robot, robot stacjonarny, robot humanoidalny i ramię mechaniczne.

2.Przewód serwa
3.Pakowanie: worek PE, pudełko kolorowe, plastikowe pudełko z
Twoim logo
4.Złącze kabla
5.Dostosowane Różne serwa o szerokim napięciu roboczym
1.Funkcja zatrzymania startu i zatrzymania przyspieszania: można ustawić prędkość i wartość przyspieszenia, efekt ruchu jest delikatniejszy.
2.Wysoka precyzja, pozycja bezwzględna 360 stopni, precyzja 4096 bitów, najwyższa rozdzielczość pozycji to 0.088 stopni, jeśli sterowanie wynosi 90 stopni, wprowadź 4096 / 360 * 90 = 1024, jeśli sterowanie wynosi 180 stopni, wprowadź 4096 / 360 * 180 = 2048, aby obliczyć.
3.Istnieją cztery możliwości przełączania trybów pracy (serwo z pozycją trybu 0, tryb 1 z pętlą zamkniętą, tryb 2 z pętlą otwartą, tryb z 3-stopniowym serwomechanizmem).
1)、Tryb 0: Tryb lokalizacji, tryb domyślny. W tym trybie można realizować kontrolę kąta bezwzględnego w zakresie 360 stopni. Wspieraj ruch przyspieszający.
2)、Tryb 1:Pętla zamknięta prędkości, w interfejsie programowania tryb pracy jest ustawiony na 1, przełącz na tryb pętli zamkniętej prędkości i wprowadź odpowiednią prędkość w kolumnie prędkości, aby działać.
3)、Tryb 2:Pętla otwarta prędkości, w interfejsie programowania tryb pracy jest ustawiony na 2, przełącz na tryb pętli otwartej prędkości i wprowadź odpowiedni czas w kolumnie czasu do uruchomienia.
4)、Tryb3:Tryb krokowy: w interfejsie programowania maksymalne/minimalne ograniczenie kąta jest ustawione na 0, a tryb pracy jest ustawiony na 3. Przełącz na tryb krokowy. Wprowadź pozycję na pasku pozycji, aby wykonać krok w stronę pozycji docelowej. Kliknij pozycję ponownie, aby kontynuować krok w tym samym kierunku.
4. Tryb wieloobrotowy, kontrola bezwzględna 360 stopni i sprzężenie zwrotne, przy najwyższej dokładności, kontrola położenia bezwzględnego może wynosić plus minus 7 obrotów, ale liczba cykli zasilania nie jest zapisywana, tylko położenie bezwzględne wartość sprzężenia zwrotnego zostaje zachowana.
5. Kalibracja jednym klawiszem, instalacja pod kątem 360 stopni w dowolnej pozycji, (40 (dziesiętne) wejście adresu 128 (dziesiętne)) jedna bieżąca pozycja korekcji klawisza to środkowa (2048 (dziesiętna)).
6, poziom komunikacji TTL, komunikacja asynchroniczna półdupleksowa, obsługa protokołu magistrali w celu dostosowania parametrów odczytu i zapisu oraz dodanie funkcji odczytu synchronicznego (wyślij instrukcję, aby otrzymać instrukcję odczytu zwrotnego z każdego serwa na magistrali po kolei .)
7、Wiele zabezpieczeń (przeciążenie, przetężenie, przepięcie, przegrzanie, ustawienie przełącznika, zmiana parametrów stanu)
1)、Zabezpieczenie przed przeciążeniem: poprzez wykrywanie położenia, podczas ruchu od startu pozycji do pozycji docelowej, w przypadku wykrycia, że bieżąca pozycja nie jest pozycją docelową po napotkaniu blokady z przeszkodami, siła rozładunku trwa 2S (20% domyślnej siły blokady). Do czasu wyzwolenia nowego polecenia, Zwolnij zabezpieczenie
2)、Zabezpieczenie nadprądowe: poprzez ustawioną wartość prądu sprawdź, czy prąd osiągnie ustawioną wartość prądu. Gdy osiągnie ustawioną wartość prądu, zwolnij siłę (domyślny moment obrotowy wynosi 0). Do czasu wyzwolenia nowego polecenia Zwolnij zabezpieczenie
3)、Zabezpieczenie przed przepięciem: wykryj aktualną wartość napięcia. Jeśli przekroczy ustawioną wartość napięcia, alarm wyświetli przepięcie.
4)、Zabezpieczenie przed przegrzaniem: wykrywa aktualną temperaturę silnika. Jeśli temperatura przekroczy ustawioną wartość, wyświetli się alarm przegrzania.
8: Wielokrotne sprzężenie zwrotne:
1) Sprzężenie zwrotne obciążenia: wyjście sterujące prądem steruje cyklem pracy napięcia silnika, a pełna skala wynosi 1000 = 100% wyjściowego momentu obrotowego.
2) Aktualne sprzężenie zwrotne: Prąd roboczy serwa, 1 = 6.5mA
3) Napięcie sprzężenia zwrotnego: napięcie robocze serwa, 70=7V, 0.1V
4)Sprzężenie zwrotne temperatury: wewnętrzna temperatura robocza aktualnego serwa (pomiar temperatury).
5)Sprzężenie zwrotne prędkości: sprzężenie zwrotne prędkości aktualnego obrotu silnika i liczby kroków w jednostce czasu (na sekundę)
9.Otwórz parametry PID.





Related Collections







