Skoczek Xiake800 VTOL - puszczania samolotów Y3 pionowy start 800 mm rozpiętość skrzydeł samolot FPV długi lot samoloty przewoźnik Model RC
Skoczek Xiake800 VTOL - puszczania samolotów Y3 pionowy start 800 mm rozpiętość skrzydeł samolot FPV długi lot samoloty przewoźnik Model RC
RCDrone
Nie można załadować gotowości do odbioru
SPECYFIKACJA Zworki Xiake800 VTOL
Rozdzielczość przechwytywania wideo: Inna
Typ: Samolot
Stan montażu: Prawie gotowy
Odległość zdalna: 5km
Pilot zdalnego sterowania: Tak
Zalecany wiek: 14+lat
Źródło zasilania: Elektryczne
Pakiet zawiera: Pilot zdalnego sterowania
Pochodzenie: Chiny kontynentalne
Poziom umiejętności operatora: Średnio zaawansowany
Numer modelu: XIAKE800 rozpiętość skrzydeł 800mm
Materiał: Pianka
Do użytku wewnątrz/na zewnątrz: Na zewnątrz
Czas lotu: 30min
Funkcje: Automatyczny powrót
Wymiary: 51cm-99cm
Tryb kontrolera: TRYB2
Bateria kontrolera: zalecana 4s 1500-2200mah 30C
Kanały sterujące: 12 kanałów i więcej
Typ mocowania kamery: Inny
Nazwa marki: uuustore
Fotografia lotnicza: Nie
Dane techniczne:
Marka: Jumper
Model: XiaKe800
Model: skrzydło do pionowego startu Y3
Rozpiętość skrzydeł: 800mm
Śmigło: 6238
Silnik: 2205,5
Regulacja elektryczna: 30A
Sterowanie lotem: w oparciu o PIX
BEC: podwójne napięcie wyjściowe
Odbiornik: ELRS3.0
Interfejs FPV: HD/analogowy
GPS: powrót jednym kliknięciem
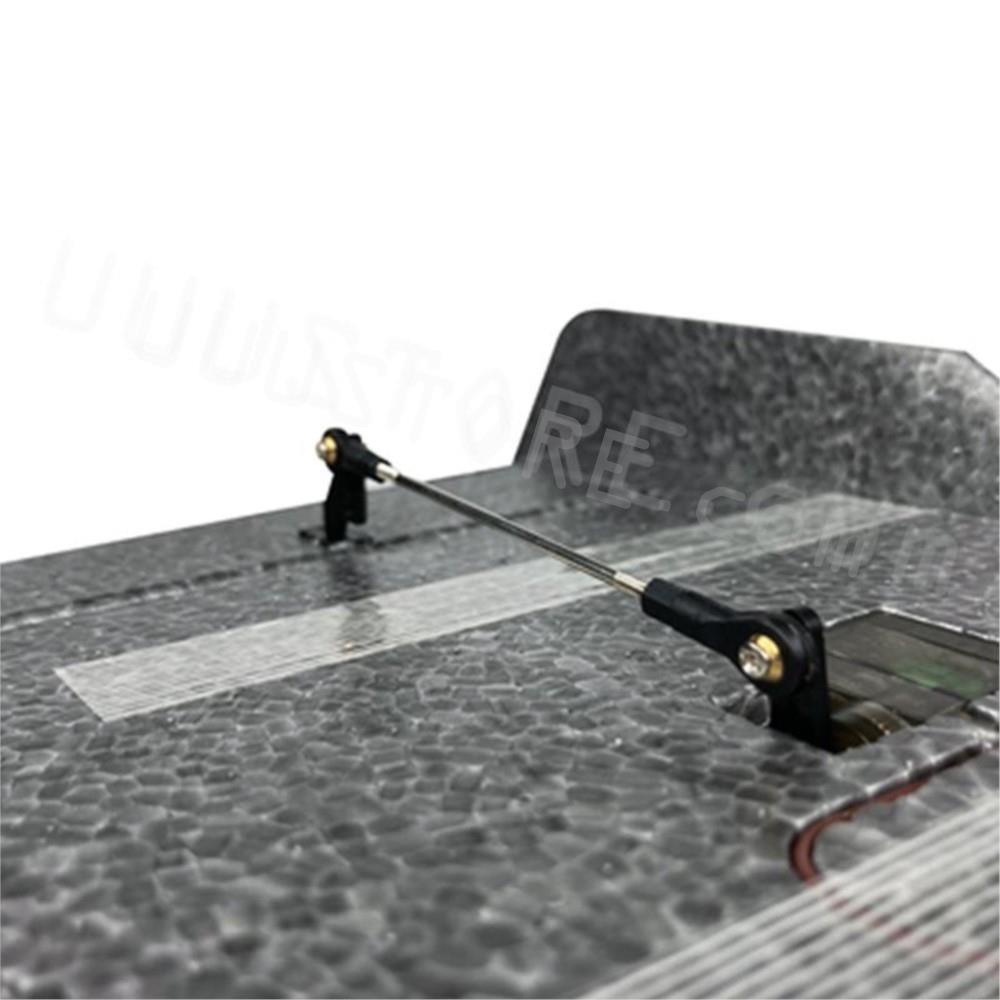
Przekładnia kierownicza: w całości metalowe zęby
Bateria: zalecana 4s 1500-2200mah 30C
Wytrzymałość: 30 minut
Masa startowa: 650-1000g
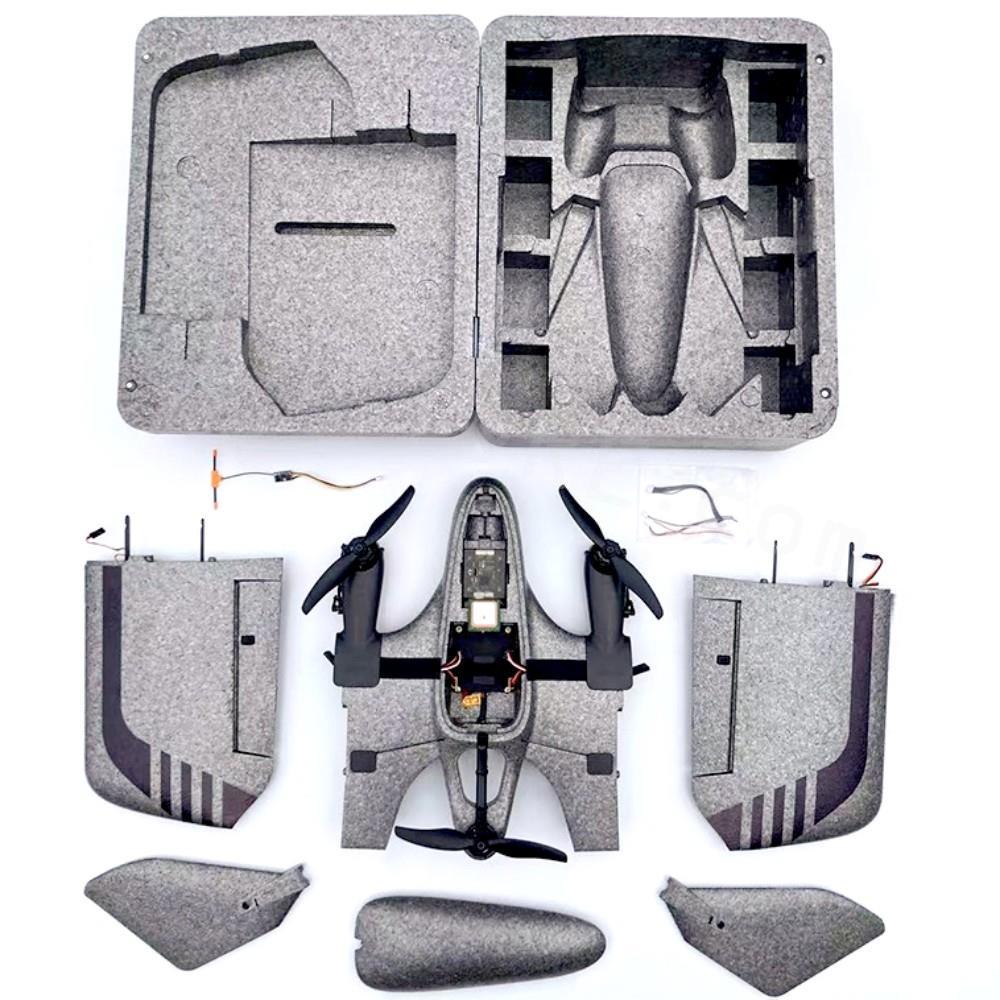
Zawarty pakiet PNP:
(Korpus EPP+części plastikowe, sterowanie lotem, silnik elektryczny, regulator elektryczny, przekładnia kierownicza, blok modułu GPS, śmigło )
okres promocji: dodaj Interfejs ELRS lub D16 CRSF i opakowanie
konfiguracja PNP * 1,
T-PRO-ELRS -SE pilot zdalnego sterowania * 1,
Uwaga: polecamy Bateria Tattu 4s 2200 45c, ale nie znajduje się w pakiecie
Środki ostrożności podczas lotu XIAKE800 UAV
Ustawienia fabryczne kontroli lotu
Wzór:
1. Tryb samostabilizacji pionowej: tylko stabilizacja położenia. Przepustnica, podnoszenie, toczenie i kurs są sterowane ręcznie
2. Tryb lotu z samostabilizacją A: tylko stabilizacja położenia przestrzennego. Przepustnica, podnoszenie i toczenie są sterowane ręcznie
3. Tryb rejsu: środkowe położenie dźwigni przyspieszenia, wysokość i utrzymywanie kursu;
4. Tryb powrotu: powrót stałopłatem na wysokość 100 metrów, powrót do zawisu nad punktem startu bez lądowania
Monitor parametrów lotu:
1. Ostrzeżenie o minimalnej wysokości: wartość domyślna to 20 m. Jeśli samolot znajduje się poniżej 20 m, zostanie nadana informacja o „wysokości za małej”
2. Transmisja mocy baterii: będzie transmitować procent mocy baterii pokładowej w czasie rzeczywistym
3. Transmisja przełączania trybów: podczas przełączania trybów wyświetla aktualny tryb lotu
4. Ogłoszenie o blokowaniu GPS: gdy GPS jest zablokowany, zostanie ogłoszony komunikat „Blokowanie GPS 3D”
Środki ostrożności podczas lotu:
1. Start w „trybie samostabilizacji w pionie”: Nie naciskaj gwałtownie pedału przyspieszenia i ustaw drona w pozycji poziomej w czas rzeczywisty.
2. Konwersja z „trybu samostabilizacji w pionie” do „trybu lotu w trybie samostabilizacji A”: w przypadku pierwszego lotu zaleca się, aby wysokość konwersji nie była mniejsza niż 30 metrów, środkowe położenie dźwigni przepustnicy, przełącznika i kontrola lotu automatycznie kontroluje konwersję i podczas tego procesu zabrania się uderzania drążkiem. Podczas procesu konwersji samolotu prędkość silnika znacznie wzrasta (posłuchaj dźwięku). Po konwersji pilot wznawia sterowanie prędkością silnika (w tym momencie dźwięk znacznie spada odpowiednio do środkowego położenia pedału gazu). Silnik ogonowy przestaje się obracać, nos podnosi się, a samolot powraca do stanu lotu poziomego. Konwersja została zakończona (proces ten trwa 2-3 sekundy).
3. Przełącz z „trybu lotu samostabilizującego się A” na „tryb przelotowy”: dostosuj wysokość, po wyruszeniu przełącz się na „tryb przelotowy”, a dron wejdzie w stan utrzymywania wysokości i kursu (przyspieszenie 50%)
4. „Tryb powrotu”: Wysokość samolotu jest automatycznie dostosowywana do 100 m i powraca. Jeśli zajdzie potrzeba zmiany, po prostu przełącz na inny tryb.
5. Aby wylądować, przejdź do „trybu samostabilizacji w pionie”: leć na wysokość nad punktem lądowania (wysokość nie jest zbyt duża), wycentruj przepustnicę, przełącz przełącznik, a dron szybko przejdzie w „tryb samostabilizacji w pionie”.
6. Podczas lądowania należy zwrócić uwagę: Jeżeli wysokość zawisu będzie zbyt duża, podczas zbierania paliwa i lądowania moc silnika spadnie, co osłabi zdolność samolotu do regulacji samostabilności i znacznie zwiększy wpływ wiatru. Sugestia: Po przejściu z lotu poziomego na lot pionowy nadal używaj stałopłata do latania (popychacz obniża wysokość, a przepustnica może być w tym momencie nisko). Wraz ze zmniejszaniem się wysokości i prędkości stopniowo zwiększaj przepustnicę (pamiętaj, że w locie pionowym nie da się przeciągnąć).
Ostrzeżenie: Nie blokuj przepustnicy, gdy dron jest w powietrzu (nowy punkt powrotu zostanie zapisany za każdym razem, gdy dron zostanie odblokowany)


Pionowy start i lądowanie eliminuje trudności związane ze startem i lądowaniem, jakie występują w przypadku tradycyjnych stałopłatów. Konstrukcja ta zmniejsza wymagania miejsca potrzebne do startu, ponieważ zawiera mechanizm podnoszący, który napędza tryb dostosowany do maksymalnego skrócenia ramienia siłowego przekładni kierowniczej, całkowicie eliminując w ten sposób drgania i zjawiska samowzbudności spowodowane przez sterowanie z napędem bezpośrednim biegów.
XIAKE8OO posiada wysoki kontroler lotu oparty na PIX i BEC. Spraw, aby układ okablowania maszynowni był prosty i niezawodny. Wyjścia BEC odpowiednio SV (dla sterowania lotem) i 9V (dla FPV).

XIAKE8O posiada bezpieczne i kompaktowe pudełko do przechowywania. Przechowywanie części kadłuba typu klamra sprawia, że transport jest bezpieczniejszy. 8 niezależnych pozycji przechowywania baterii, może latać przez cały dzień.
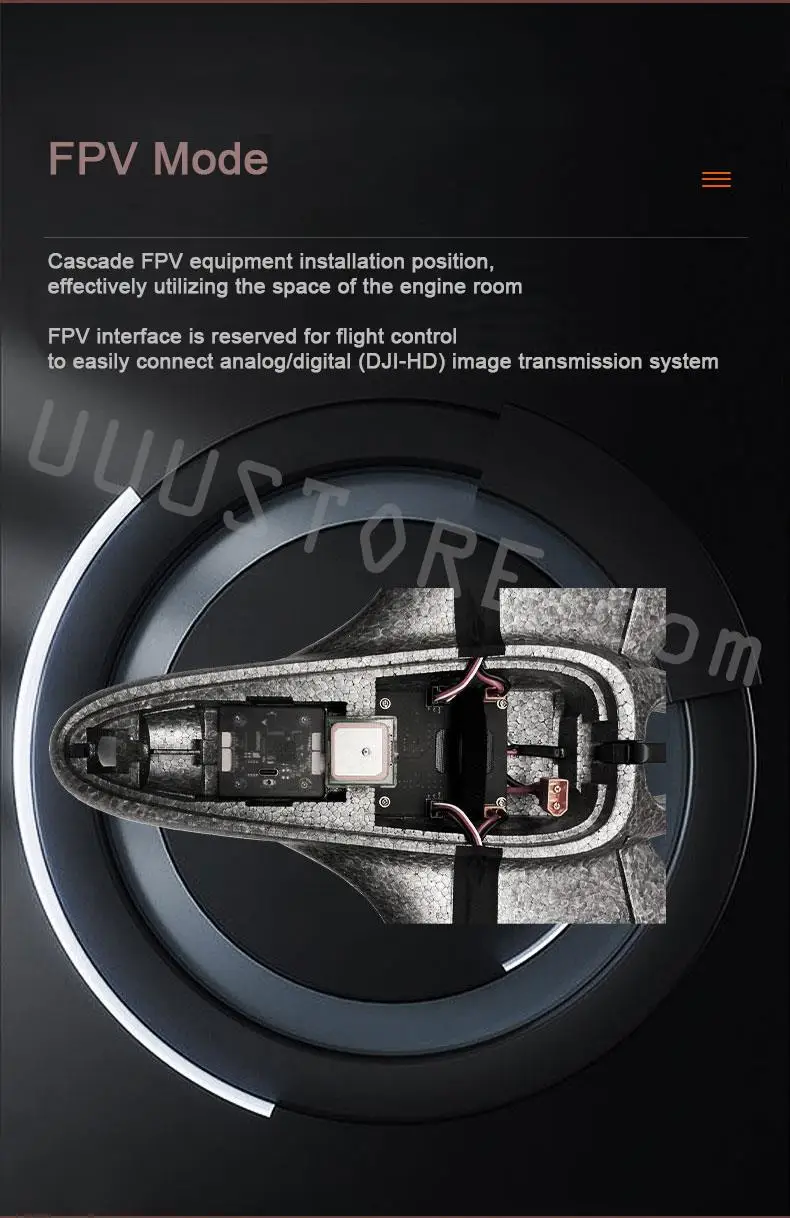
Interfejs Cascade FPV został zaprojektowany z myślą o łatwej łączności z kontrolerami lotu, umożliwiając bezproblemową integrację z analogową i cyfrową (np. DJI HD) transmisją obrazu systemów.

Innowacyjna konstrukcja umożliwiająca szybki demontaż XIAKE8OO ułatwia przenoszenie i transport.skrzydło przyjmuje tradycyjny interfejs DuPont, którego można nadal używać, gdy skrzydło wibruje.

Schemat okablowania sterowania lotem XIAKE800 (wersje PNP i RTF, okablowanie i debugowanie mają zostało ukończone przed dostawą)
Related Collections