









SteadyWin GIM3510-8 mały moduł przegubu robota, przekładnia planetarna 8:1, sterownik CAN, podwójny enkoder, 24V 60W
SteadyWin GIM3510-8 mały moduł przegubu robota, przekładnia planetarna 8:1, sterownik CAN, podwójny enkoder, 24V 60W
SteadyWin
Nie można załadować gotowości do odbioru
Przegląd
Moduł stawowy małego robota SteadyWin GIM3510-8 to zintegrowany napęd stawowy robota, który łączy silnik Aloha, reduktor planetarny 8:1, wbudowany sterownik komunikacyjny oraz podwójne enkodery w kompaktowej cylindrycznej obudowie. Z nominalnym zasilaniem 24 V (szeroki zakres 12–40 V lub 12–48 V w zależności od płyty sterującej), wysoką prędkością wyjściową do 564,6 rpm po redukcji oraz komunikacją CAN bus, jest zaprojektowany do zwinnych robotów humanoidalnych, ramion robotycznych, platform mobilnych oraz innych systemów wieloosiowych wymagających precyzyjnej, zamkniętej kontroli ruchu.
Kluczowe cechy
- Redukcja planetarna o wysokiej prędkości: Reduktor planetarny 8:1 z nominalną prędkością wyjściową 535,5 rpm i maksymalną 564,6 rpm (GDZ34), odpowiedni do szybko poruszających się stawów.
- Szeroki zakres napięcia: Praca nominalna 24 V z zakresem wejściowym 12–40 V (GDZ34) lub 12–48 V (GDS34) dla elastycznego projektowania systemu zasilania.
- Efektywne wyjście momentu obrotowego: Stała momentu do 0,32 N.m/A z nominalnym momentem do 1,68 N.m i momentem szczytowym do 6,02 N.m, zapewniając efektywną transmisję mocy dla lekkich i średnich stawów robotycznych.
- Zintegrowany sterownik z magistralą CAN: Wbudowana płyta sterująca (GDS34 lub GDZ34) obsługuje komunikację CAN dla uproszczonego okablowania i zdalnego sterowania.
- Podwójna informacja zwrotna z enkodera: Enkoder 14-bitowy na sterowniku i drugi enkoder na wałku wyjściowym dla dokładnej informacji zwrotnej o pozycji i prędkości.
- Kompaktowa struktura: Tylko 46 mm średnicy zewnętrznej i całkowitą długością od 46,5 mm (bez sterownika) do 51,5 mm (ze sterownikiem), umożliwiająca gęste układy wielostawowe.
- Trwałość środowiskowa: Klasa ochrony IP54, temperatura pracy od -20°C do +80°C oraz poziom hałasu poniżej 60 dB.
- Funkcje ochronne: Ochrona przed przegrzaniem, przepięciem i przeciążeniem pomaga utrzymać bezpieczną i niezawodną pracę w systemach robotycznych o ciągłym działaniu.
- Wytrzymałość mechaniczna: Obsługuje obciążenie osiowe do 75 N i obciążenie promieniowe do 300 N na wale wyjściowym, z luzem reduktora wynoszącym 15 arcmin.
- Opcja niestandardowego hamulca: Obsługuje integrację niestandardowego hamulca dla stawów, które wymagają momentu trzymania, gdy są wyłączone.
W przypadku pytań dotyczących wsparcia technicznego, dostosowania lub integracji modułu stawowego małego robota GIM3510-8, prosimy o kontakt https://rcdrone.top/ lub wysłanie e-maila na adres [email protected].
Zastosowania
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
Specyfikacje
| Parametr | Jednostka | GIM3510-8 + GDS34 (SDC101) | GIM3510-8 + GDZ34 |
|---|---|---|---|
| Model | - | GIM3510-8 | GIM3510-8 |
| Model płyty sterującej | - | GDS34 (SDC101) | GDZ34 |
| Napięcie nominalne | V | 24 | 24 |
| Zakres napięcia | V | 12–48 | 12–40 |
| Moc znamionowa | W | 98 | 60 |
| Moment obrotowy znamionowy | N.m | 1.68 | 1.00 |
| Moment szczytowy | N.m | 3.41 | 6.02 |
| Prędkość nominalna po redukcji | obr/min | 430 | 535.5 |
| Maksymalna prędkość po redukcji | obr/min | 529 | 564.6 |
| Prąd nominalny | A | 4.1 | 2.5 |
| Prąd szczytowy | A | 8.30 | 25.30 |
| Opór fazy | Ω | 0.48 | 0.48 |
| Indukcyjność fazy | mH | 0.31 | 0.31 |
| Stała prędkości | obr/min/V | 22.04 | 23.53 |
| Stała momentu | N.m/A | 0.44 | 0.32 |
| Liczba par biegunów | Pary | 7 | 7 |
| Przełożenie | - | 8:1 | 8:1 |
| Typ przekładni | - | Planetarna | Planetarna |
| Materiał przekładni redukcyjnej | - | ALU | ALU |
| Luźność przekładni redukcyjnej | arcmin | 15 | 15 |
| Waga silnika bez sterownika | g | 247.6 | 247.6 |
| Waga silnika ze sterownikiem | g | 259.6 | 259.6 |
| Rozmiar bez sterownika (średnica x długość) | mm | Ø46 x 46.5 | Ø46 x 46.5 |
| Rozmiar ze sterownikiem (średnica x długość) | mm | Ø46 x 51.5 | Ø46 x 51.5 |
| Max. obciążenie osiowe | N | 75 | 75 |
| Max. obciążenie promieniowe | N | 300 | 300 |
| Hałas | dB | <60 | <60 |
| Komunikacja | - | CAN | CAN |
| Drugi enkoder na wałku wyjściowym | - | TAK | TAK |
| Klasa ochrony | - | IP54 | IP54 |
| Temperatura pracy | °C | -20 do +80 | -20 do +80 |
| Rozdzielczość enkodera (enkoder napędu) | bit | 14 | 14 |
| Wsparcie dla oddzielnego enkodera | - | NIE | NIE |
| Custom brake support | - | TAK | TAK |
Instrukcje
- SteadyWin_GIM3510-8_Schemat_instalacji.stp
- GlM3510-8_rysunek_instalacji.pdf
- Gl3510-8_z_hamulcem_rysunek_instalacji.pdf
Szczegóły

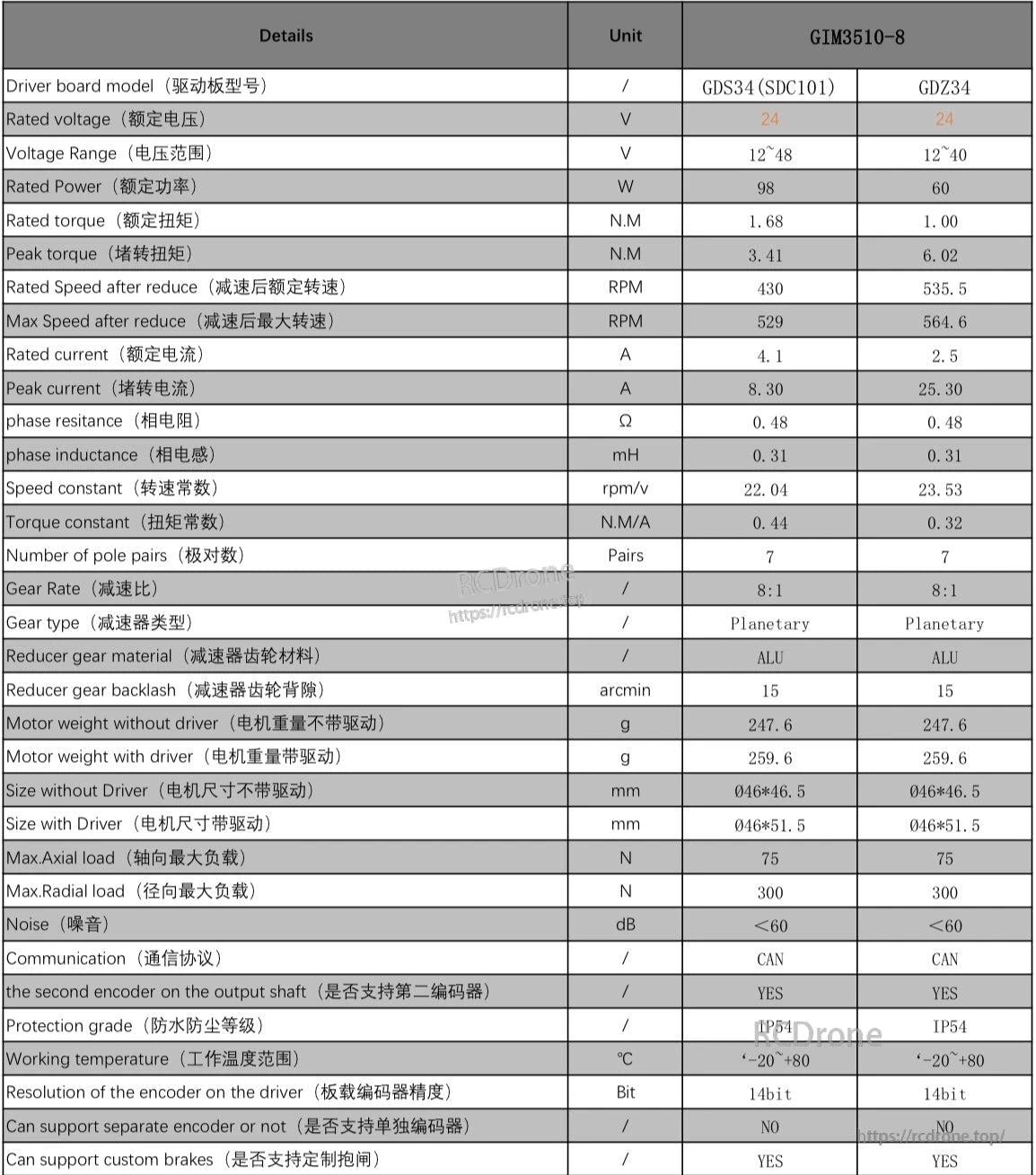
Specyfikacje stawów robota GIM3510-8 porównują płyty sterujące GDS34 i GDZ34. Kluczowe parametry obejmują napięcie, moc, moment obrotowy, prędkość, prąd, wagę, rozmiar, nośność, hałas, komunikację, enkoder, stopień ochrony, zakres temperatur oraz wsparcie dla niestandardowego hamulca.
Related Collections









