



SteadyWin DD4015 Silnik 24V RS485/CAN Enkoder absolutny 14bit 0,25 N.M 125obr/min 114g -20~80℃
SteadyWin DD4015 Silnik 24V RS485/CAN Enkoder absolutny 14bit 0,25 N.M 125obr/min 114g -20~80℃
SteadyWin
Cena regularna
$152.00 USD
Cena regularna
Cena promocyjna
$152.00 USD
Cena jednostkowa
na
Z wliczonymi podatkami.
Koszt wysyłki obliczony przy realizacji zakupu.
Nie można załadować gotowości do odbioru
Przegląd
Silnik SteadyWin DD4015 to kompaktowy silnik z komunikacją RS485 / CAN oraz enkoderem absolutnym jednorotacyjnym (14bit). Jest przeznaczony do pracy nominalnej 24V (zakres 10~28V) i nadaje się do napędu robotyki, gdzie wymagane jest sprzężenie zwrotne pozycji w pętli zamkniętej.
Kluczowe cechy
- Komunikacja: RS485 / CAN
- Enkoder: Jednorotacyjny absolutny, rozdzielczość 14bit
- Moment nominalny: 0.25 N.M; moment szczytowy: 0.35 N.m
- Prędkość nominalna: 125 rpm; maksymalna prędkość bez obciążenia: 1013 rpm
Specyfikacje techniczne
| Parametr | Wartość |
|---|---|
| Napięcie nominalne | 24V |
| Zakres napięcia | 10~28V |
| Prąd nominalny | 1.2A |
| Moc nominalna | 28.8W |
| Moment nominalny | 0.25N.M |
| Prędkość nominalna | 125obr/min |
| Prędkość maksymalna bez obciążenia | 1013 obr/min |
| Maksymalny moment | 0.35 N.m |
| Maksymalny prąd | 1.85A |
| Stała prędkości | 42.21obr/min/V |
| Stała momentu | 0.17N.M/A |
| Liczba par biegunów | 11Par |
| Opór fazy | 12.57Ω |
| Indukcyjność fazy | 2.48Mh |
| Komunikacja | RS485 / CAN |
| Typ enkodera | Jednoobrotowy absolutny |
| Rozdzielczość | 14bit |
| Waga silnika | 114g |
| Temperatura pracy | -20~80℃ |
Mechanika / Instalacja (z rysunku)
- Oznaczenie modelu: DD4015
- Średnica zewnętrzna: Ø40 ±0.1
- Długość całkowita: 33 ±0.1
- Długości segmentów: 12.4 i 20.1
- Średnica wału: Ø5
- Wzór z przodu: Ø20; 4-M3 (głębokość ▽3); Ø13.6 (+0.05/0) (głębokość ▽2); Ø12.6 (+0.1/0) (głębokość ▽12)
- Wzór z tyłu: Ø33; 4-M3 (głębokość ▽4.5)
- Złącze: SH1.0-8PIN
- SH1.0-8PIN sygnały: 485_A, 485_B, CAN_H, CAN_L, GND, GND, VCC, VCC
Scenariusze zastosowania
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
Dokumenty
W celu uzyskania pomocy w zakresie okablowania, integracji lub zamówień, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/.
Szczegóły
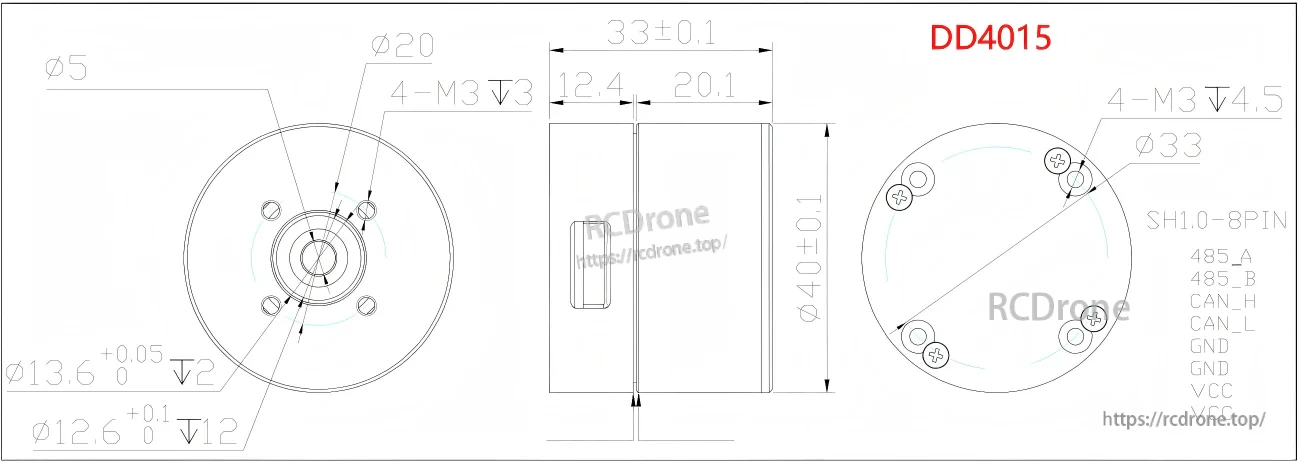
Wymiary mechaniczne i wzory otworów montażowych dla DD4015, plus pinout złącza SH1.0 8-pin dla okablowania RS485 i CAN.
Related Collections



