




SteadyWin GB6025 Silnik 36V 504RPM 1,77N·m Opcja enkodera AS5048A/AS5600 Kompatybilny z pierścieniem ślizgowym
SteadyWin GB6025 Silnik 36V 504RPM 1,77N·m Opcja enkodera AS5048A/AS5600 Kompatybilny z pierścieniem ślizgowym
SteadyWin
Nie można załadować gotowości do odbioru
Przegląd
Silnik SteadyWin GB6025 to silnik 36V zaprojektowany do zastosowań w robotyce i kontroli ruchu. Obsługuje enkodery 12-bitowe i 14-bitowe oraz jest specyfikowany z opcjami enkoderów AS5048A/AS5600.
Kluczowe cechy
- Kompatybilny z enkoderami 12-bitowymi i 14-bitowymi
- Kompatybilny z pierścieniem ślizgowym
- Stabilny przy niskich prędkościach; szeroko stosowany w gimbalach i podzespołach
- Opcje typu enkodera: AS5048A / AS5600
Zastosowania
- Roboty humanoidalne
- Ramiona robotyczne
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
Specyfikacje
| Model | GB6025 |
| Napięcie nominalne | 36V |
| Nominalny moment obrotowy | 1.77 N·m |
| Prędkość nominalna | 504 RPM |
| Max prędkość | 720 RPM |
| Prąd nominalny | 7.4 A |
| Moment obrotowy przy zablokowaniu | 2.68 N·m |
| Prąd przy zablokowaniu | 10.67 A |
| Liczba zwojów uzwojenia silnika | 30T |
| Opór fazy | 3.5Ω |
| Indukcyjność fazy | 10.07Mh |
| Stała prędkości | 20rpm/v |
| Stała momentu | 0.23N.M/A |
| Inercja wirnika | 1645gcm^2 |
| Liczba par biegunów | 14 par |
| Waga silnika bez enkodera | 478g |
| Waga silnika z enkoderem | 506g |
| Max temperatura demagnetyzacji | 120℃ |
| Temperatura robocza | 20~80 ℃ |
| Typ enkodera | AS5048A/AS5600 |
Uwagi rysunkowe (z obudową enkodera)
- Średnica zewnętrzna: φ68±0.05
- Opcje długości korpusu: 48±0.2 i 42±0.2
- Wymiary kroku/sekcji: φ63
- Wzory otworów/średnice: 8-M3; 3-M2; φ44; φ30; φ53.5; φ27.5; φ22.2; φ12.7; φ6
- Dodatkowe wymiary: 14.1; 1.1
Podręczniki / Dokumenty
W przypadku pytań dotyczących przedsprzedaży i integracji (wybór enkodera, planowanie okablowania i dostęp do dokumentów), skontaktuj się z pomocą techniczną pod https://rcdrone.top/ lub wyślij e-mail na [email protected].
Szczegóły
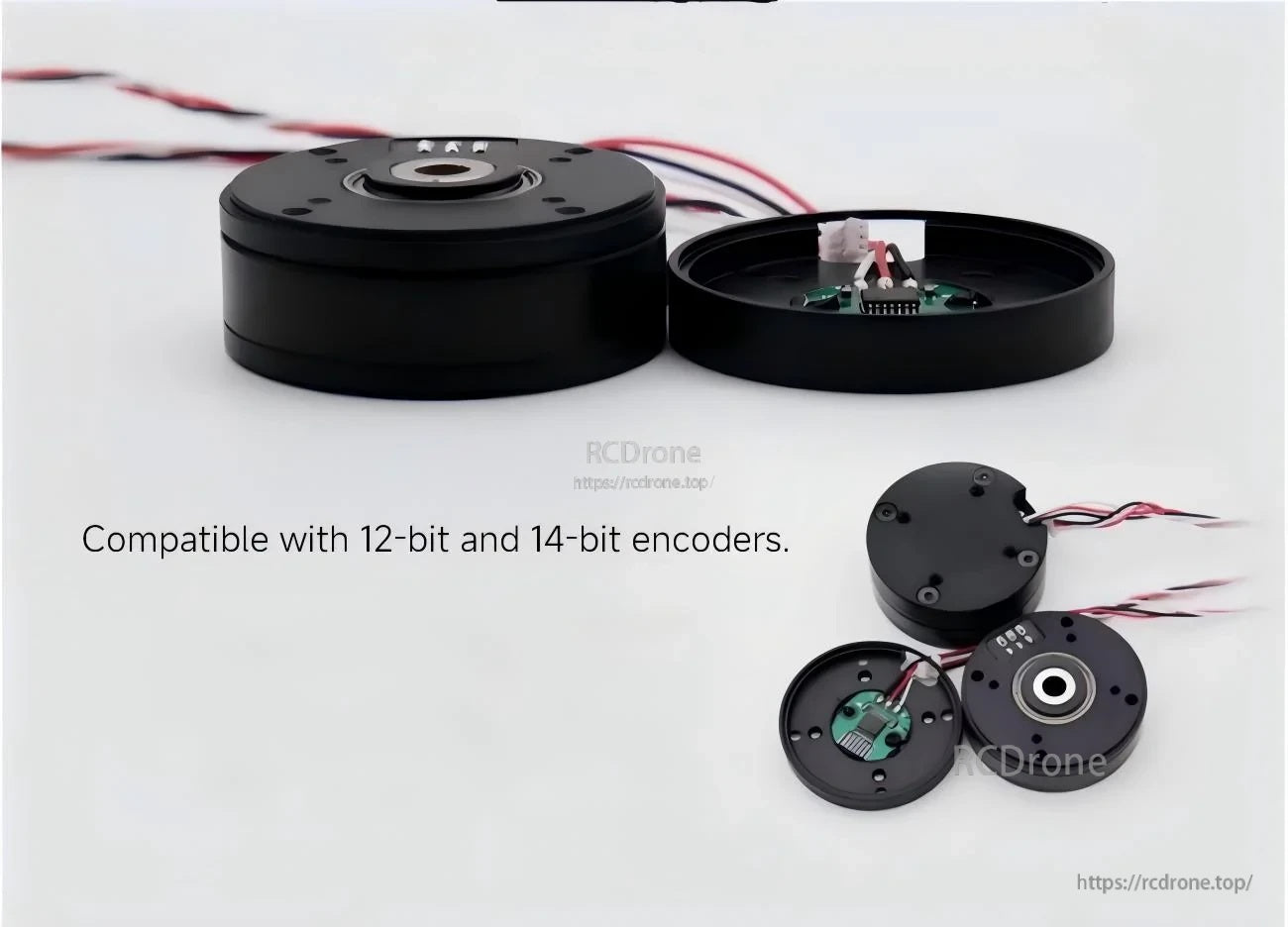
Zespół silnika GB6025 gotowy do enkodera obsługuje opcje sprzężenia zwrotnego 12-bit i 14-bit, takie jak AS5048A lub AS5600.

Budowa kompatybilna z pierścieniem ślizgowym i stabilna wydajność przy niskich prędkościach nadają się do gimbali, podów i innych konstrukcji sterowania ruchem.
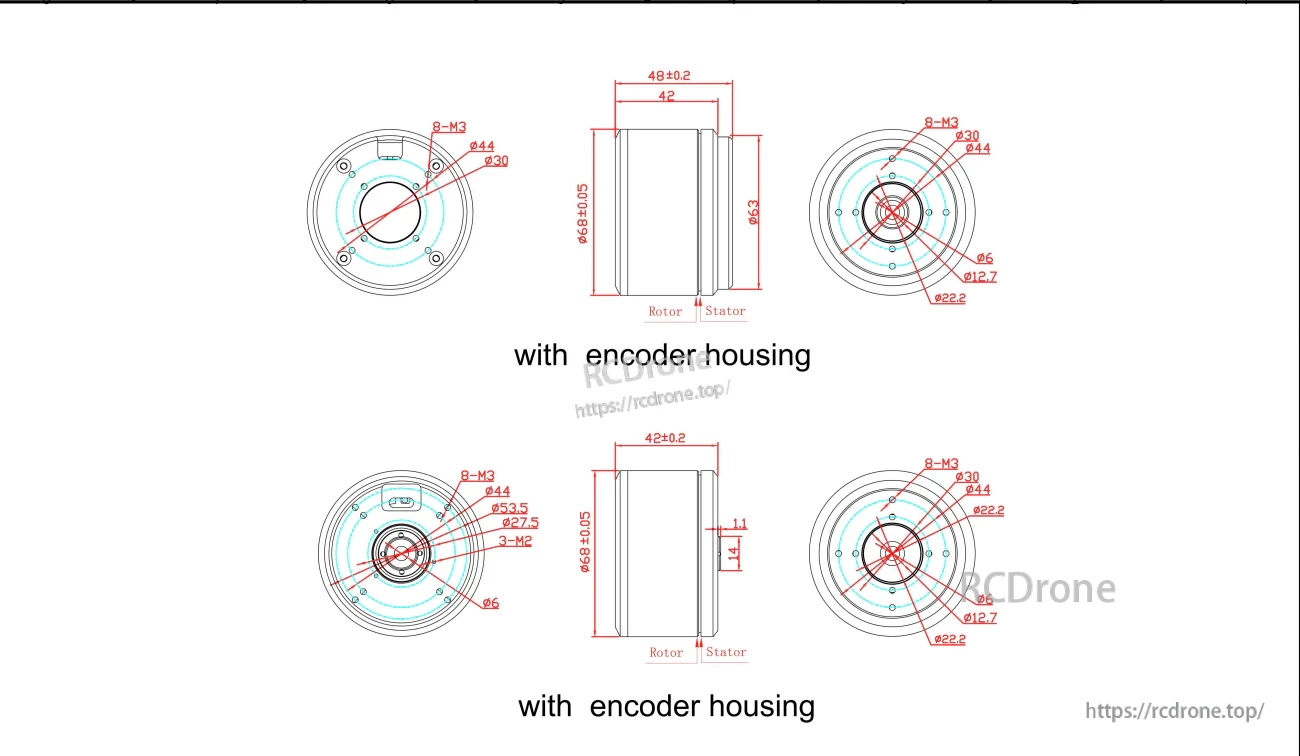
Użyj rysunku mechanicznego, aby zweryfikować dopasowanie, długość korpusu i rozstaw otworów montażowych przed integracją.
Related Collections




