SteadyWin GIM4305-10 Silnik z przekładnią planetarną — 48W, przełożenie 10:1, moment nominalny 1 N·m, 300–366 obr./min, CAN, IP54 do siłowników robotycznych
SteadyWin GIM4305-10 Silnik z przekładnią planetarną — 48W, przełożenie 10:1, moment nominalny 1 N·m, 300–366 obr./min, CAN, IP54 do siłowników robotycznych
SteadyWin
Nie można załadować gotowości do odbioru
Przegląd
Silnik reduktora planetarnego SteadyWin GIM4305-10 to kompaktowy silnik reduktora planetarnego z zintegrowanym sterownikiem SDC101 i komunikacją CAN. Zaprojektowany do precyzyjnego działania, jednostka działa przy nominalnym napięciu 24V (zakres 12-36V), dostarcza moc 48W i zapewnia nominalny moment obrotowy 1 N·m (moment zablokowania 3,47 N·m) po redukcji 10:1. GIM4305-10 ma klasę ochrony IP54 i obsługuje enkoder 14-bitowy oraz oddzielne połączenie enkodera; dostępne jest wsparcie dla niestandardowego hamulca. Wbudowane zabezpieczenia obejmują monitorowanie przegrzania, nadmiernego napięcia i przeciążenia.
W celu uzyskania pomocy technicznej i obsługi klienta skontaktuj się z: [email protected] lub odwiedź https://rcdrone.top/.
Kluczowe cechy
- Reduktor planetarny, stosunek 10:1 dla zwiększonego momentu obrotowego i kontroli pozycji.
- Zintegrowany sterownik SDC101 z komunikacją CAN dla zdalnego sterowania.
- Nominalna prędkość po redukcji 300 RPM, maksymalna 366 RPM.
- Enkoder: wbudowany 14-bitowy, obsługuje oddzielne wejście enkodera.
- Kompaktowa obudowa Ø53×26mm i niska masa (140g bez napędu; 150g z napędem).
- Parametry mechaniczne: maksymalne obciążenie osiowe 125N, maksymalne obciążenie promieniowe 500N, luz zębatkowy 15 arcmin.
- Zakres temperatury pracy -20°C do +80°C oraz hałas akustyczny <60 dB.
- Materiał przekładni redukcyjnej: ALU lub STAL. Dostępne wsparcie dla hamulca na zamówienie.
Specyfikacje
| Model | GIM4305-10 |
| Model napędu | SDC101 |
| Napięcie nominalne | 24V (zakres 12-36V) |
| Moc | 48W |
| Moment nominalny (po redukcji) | 1 N·m |
| Moment zablokowania | 3.47 N·m |
| Nominalna prędkość (po redukcji) | 300 RPM |
| Maksymalna prędkość (po redukcji) | 366 RPM |
| Nominalny prąd | 2A |
| Prąd zablokowania | 5.6A |
| Opór fazy | 1.15 Ω |
| Indukcyjność fazy | 0.41 mH |
| Stała prędkości | 15.25 rpm/v |
| Stała momentu | 0.62 N·m/A |
| Liczba par biegunów | 14 par |
| Przełożenie | 10:1 |
| Typ przekładni | Planetarna |
| Materiał przekładni redukcyjnej | ALU lub STAL |
| Luzy przekładni redukcyjnej | 15 arcmin |
| Waga silnika (bez sterownika) | 140 g |
| Waga silnika (ze sterownikiem) | 150 g |
| Rozmiar (bez sterownika) | Ø53×26 mm |
| Rozmiar (ze sterownikiem) | Ø53×26 mm |
| Max obciążenie osiowe | 125 N |
| Max obciążenie promieniowe | 500 N |
| Hałas | <60 dB |
| Komunikacja | CAN |
| Drugi enkoder | NIEm |
| Klasa ochrony | IP54 |
| Temperatura pracy | -20°C do +80°C |
| Rozdzielczość enkodera | 14 Bit |
| Wsparcie dla oddzielnych enkoderów | TAK |
| Wsparcie dla niestandardowych hamulców | TAK |
Aplikacje
- Roboty humanoidalne i stawy robotyczne
- Ramiona robotyczne i moduły napędowe
- Egzoszkielety i noszone urządzenia wspomagające
- Roboty czworonożne i stawy nóg
- Moduły napędowe AGV i robotyka mobilna
- Projekty robotów open-source (e.g., Integracja Pupper V3)
Podręczniki
- Diagram instalacji GIM4305-10SHS (PDF)
- Schemat interfejsu silnika GIM4305 (PDF)
- SteadyWin_GIM4305_10.stp
Szczegóły
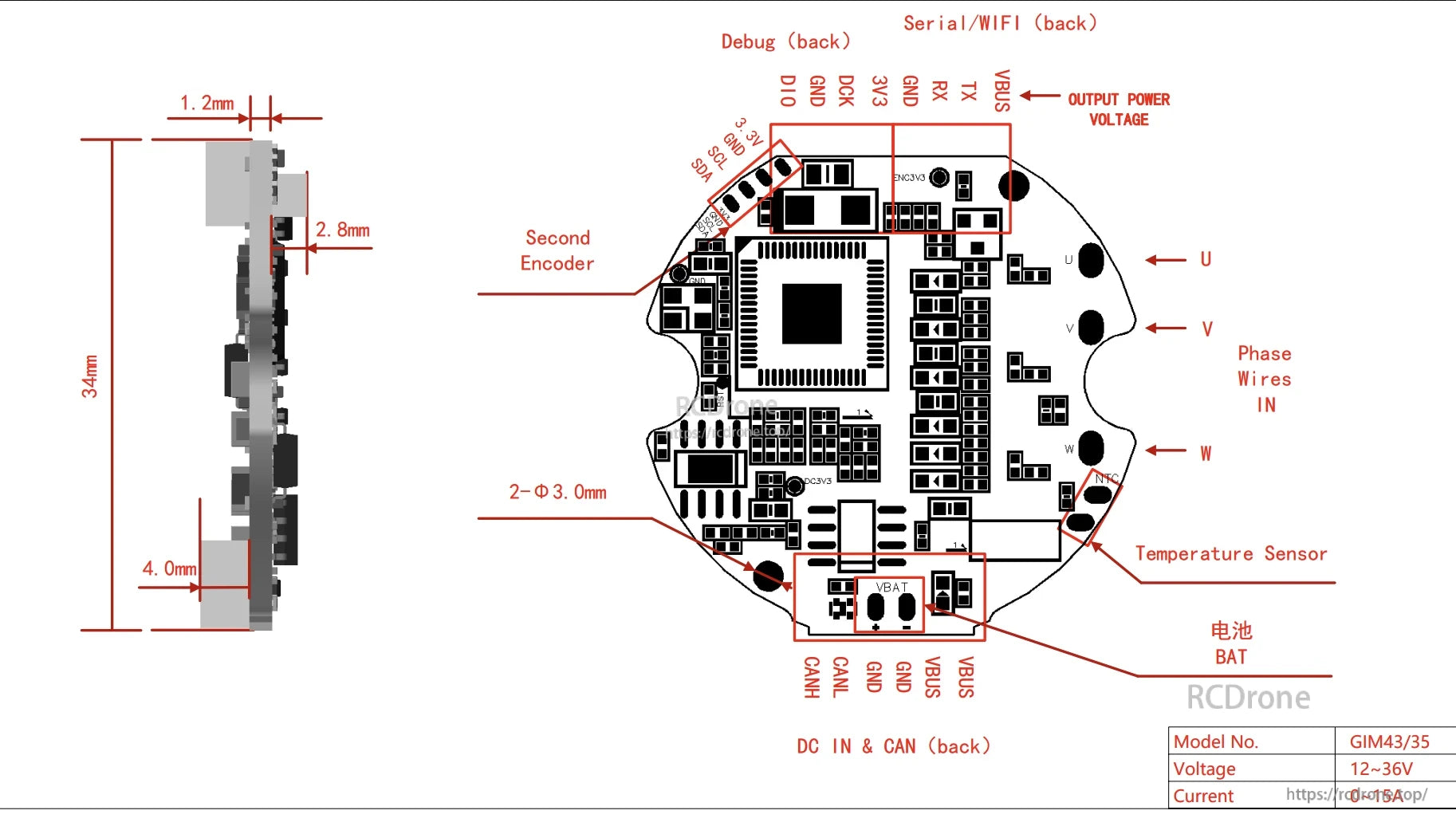
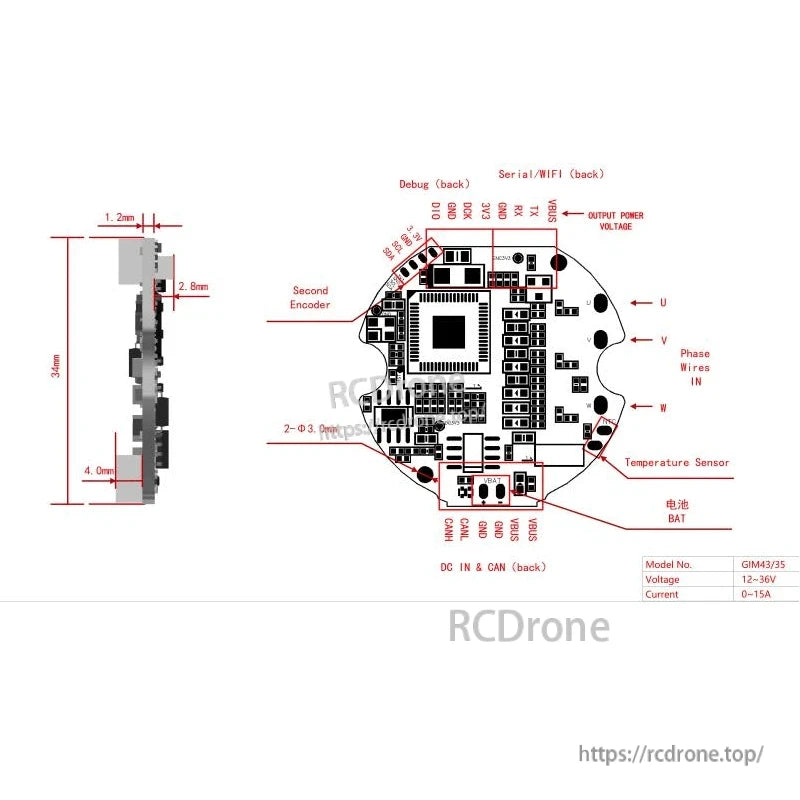
SteadyWin Diagram PCB silnika GIM43/35 pokazuje połączenia, wymiary i komponenty—enkodery, przewody fazowe, czujnik temperatury, wejście na baterię, porty debugowania—pracujące przy 12–36V i prądzie 0–15A.
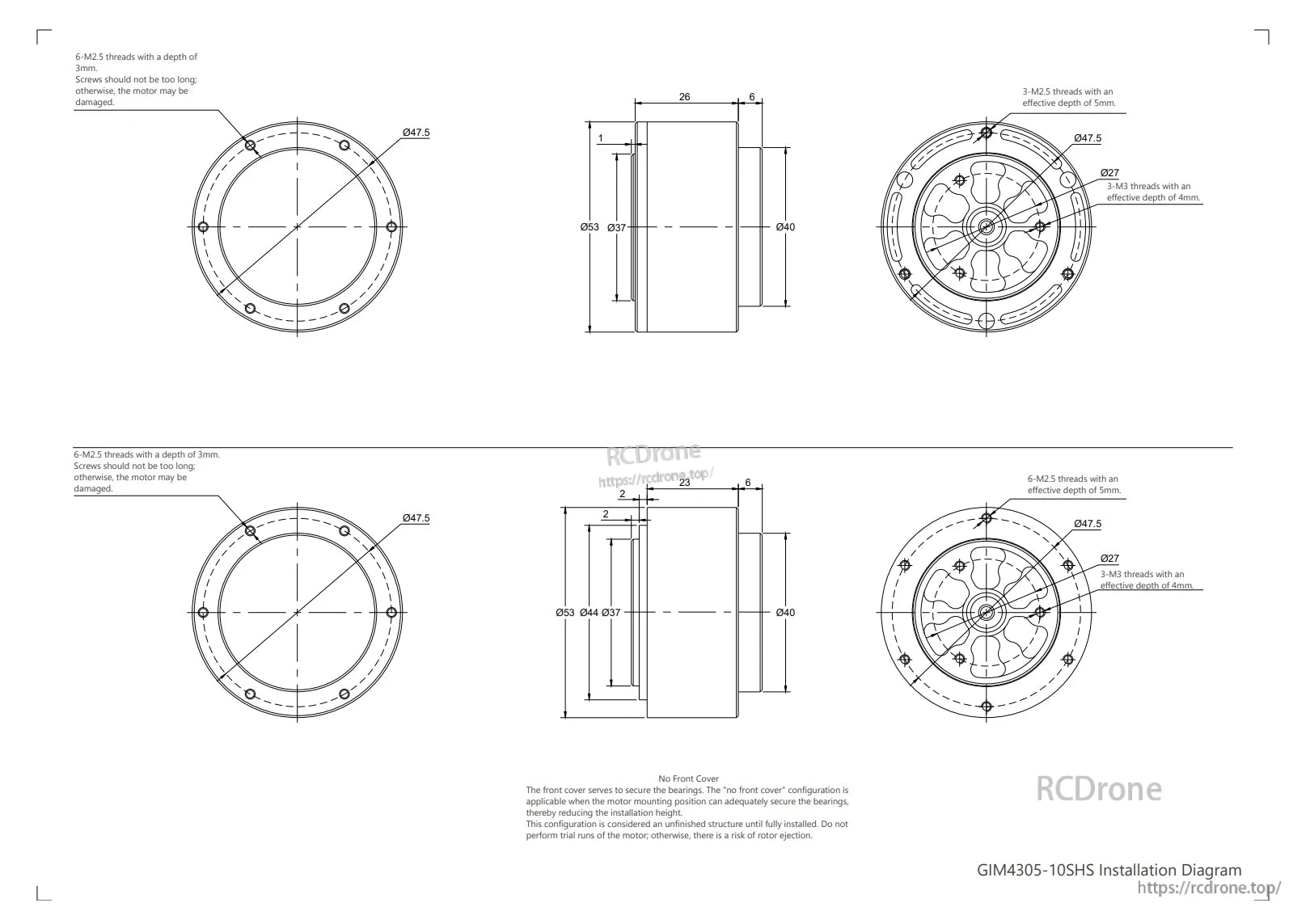
Diagram techniczny instalacji silnika GIM4305-10SHS pokazuje wymiary, specyfikacje gwintów, ostrzeżenia dotyczące długości śrub, aby zapobiec uszkodzeniom, oraz konfiguracje z i bez przedniej pokrywy.
Related Collections