





SteadyWin PM120 Silnik 36V 4 N·m 168RPM (330RPM Max) z opcją enkodera AS5048A/AS5600
SteadyWin PM120 Silnik 36V 4 N·m 168RPM (330RPM Max) z opcją enkodera AS5048A/AS5600
SteadyWin
Cena regularna
$173.00 USD
Cena regularna
Cena promocyjna
$173.00 USD
Cena jednostkowa
na
Z wliczonymi podatkami.
Koszt wysyłki obliczony przy realizacji zakupu.
Nie można załadować gotowości do odbioru
Przegląd
Silnik SteadyWin PM120 to silnik 36V zaprojektowany do robotyki i platform mobilnych, gdzie wymagane są kontrolowana prędkość i moment obrotowy. Obsługuje opcje enkodera AS5048A/AS5600 do integracji sprzężenia zwrotnego pozycji/prędkości.
Aplikacje
- Roboty humanoidalne
- Ramiona robotyczne
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
Specyfikacje
| Model | PM120 |
| Napięcie nominalne | 36V |
| Moment obrotowy nominalny | 4 N·m |
| Prędkość nominalna | 168 RPM |
| Maksymalna prędkość | 330 RPM |
| Prąd nominalny | 3.8 A |
| Moment obrotowy przy zablokowaniu | 8.5 N·m |
| Prąd zablokowania | 16 A |
| Obroty uzwojenia silnika | 20T |
| Opór fazy | 3 Ω |
| Indukcyjność fazy | 2.23Mh |
| Stała prędkości | 9.2 rpm/v |
| Stała momentu | 1.03 N.M/A |
| Inercja wirnika | 4656 gcm^2 |
| Liczba par biegunów | 21 par |
| Waga silnika bez enkodera | 1038 g |
| Waga silnika z enkoderem | 1160 g |
| Max temperatura demagnetyzacji | 120 °C |
| Temperatura pracy | 20~80 °C |
| Typ enkodera | AS5048A/AS5600 |
Wymiary rysunku mechanicznego (z diagramu instalacji)
- Średnica całkowita: Ø120 ±0.05
- Średnica zewnętrzna (stopień): Ø62
- Średnica zewnętrzna (stopień): Ø44.8
- Oznaczenie otworu/PCD: Ø70
- Oznaczenie otworu/PCD: Ø36
- Otwory montażowe: 8-M5 (oznaczone na diagramie)
- Wymiary osiowe (oznaczone na diagramie): 53 ±0.2, 46, 4, 3, 2
W przypadku pytań dotyczących wsparcia technicznego i integracji, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/.
Podręczniki
PM120_installation_diagram.pdf
Szczegóły
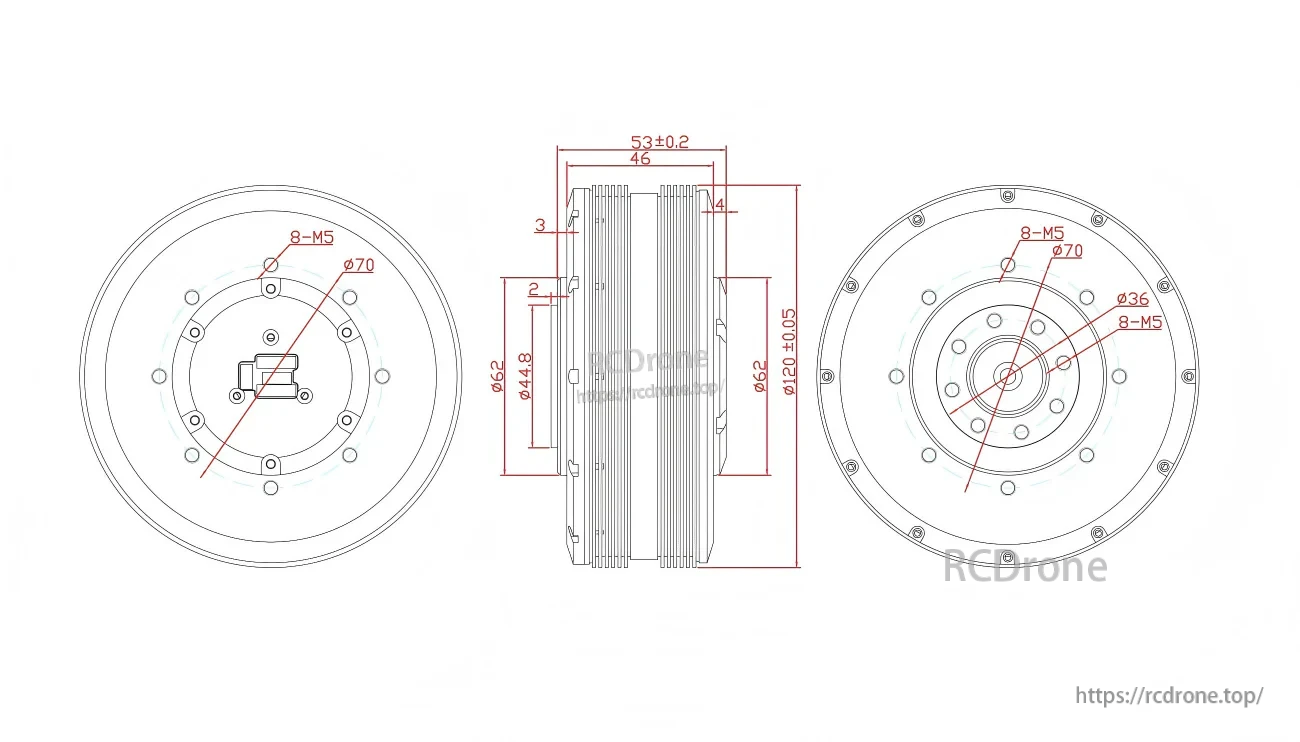
Referencje montażowe do integracji: Ø120 mm całkowita średnica z wzorem otworów 8×M5 oraz opcjami Ø70/Ø36 PCD.
Related Collections





