Dron badawczy SU17 — rozwój dronów przemysłowych PX4 typu open source z MID-360 LiDAR, czterema kamerami SLAM i EGO-Swarm
Dron badawczy SU17 — rozwój dronów przemysłowych PX4 typu open source z MID-360 LiDAR, czterema kamerami SLAM i EGO-Swarm
RCDrone
Nie można załadować gotowości do odbioru
Przegląd
Dron badawczy SU17 to wydajny quadrocopter wyposażony w: Bateria 6000mAh, LiDAR MID-360 do mapowania 3D, system SLAM z czterema kamerami do precyzyjnej lokalizacji i integracji Pozycjonowanie GPS+GLONASS. Przy masie startowej 2,3kg i ładowność 200 g, oferuje 21 minut lotu w trybie pozycjonowania wizualnego. Dzięki oprogramowaniu Prometheus obsługuje rozpoznawanie celów, planowanie ścieżki i autonomiczną nawigację, co czyni go klasa przemysłowa rozwiązanie dla badań i innowacji.
Parametry sprzętowe
Samolot
| Parametr | Opis |
|---|---|
| Typ samolotu | Quadrocopter |
| Masa startowa (w przybliżeniu) | 2,3 kg (z osłoną ochronną i baterią) |
| Odległość po przekątnej | 320 mm |
| Wymiary | Długość: 442 mm, Szerokość: 388 mm, Wysokość: 174 mm (bez osłony ochronnej) |
| Maksymalny ładunek | 200 gramów |
| Czas lotu w zawisie | Około 13 min (z zawisiem na poziomie 100%, nie poniżej 0%), pozycjonowanie wizualne: 21 min |
| Dokładność zawisu | GPS: Pionowo ±1,5 m, Poziomo ±2,0 m |
| 3D LiDAR SLAM: Pionowo ±0,08 m, Poziomo ±0,08 m | |
| 4-kamerowy wizualny SLAM: Pionowo ±0,05 m, Poziomo ±0,05 m | |
| Poziom oporu wiatru | Poziom 4 |
| Temperatura pracy | -10°C do 40°C |
| Główny układ MCU | STM32H743 |
| IMU | ICM42688/BMI088 |
| Barometr | MS5611 |
| Kompas | QMC5883L |
| Interfejs | USB typu C |
Komputer pokładowy
| Parametr | Opis |
|---|---|
| Edytor | Intel Core i5-8365U |
| Pojemność pamięci | 8 GB |
| Częstotliwość pamięci | LPDDR3@2133MHz |
| Składowanie | Dysk SSD NVMe o pojemności 256 GB |
| Port sieciowy | Baidu Apollo Ethernet X2, 12V@3A powezasilanie, obsługuje IEEE 1588-2008 (PTP v2) |
| Port szeregowy | Port szeregowy TTL X2, 5 V/3.3V@500mA power dostawa |
| USB | Typ-C X2 (1x USB2.0, 1x USB3.0) |
| HDMI | HDMI 1.4 |
Akumulator zasilający
| Parametr | Opis |
|---|---|
| Model | SU17-L |
| Typ baterii | Akumulator litowo-polimerowy wysokociśnieniowy |
| Napięcie znamionowe | 26,4 V (maks.), 21 V (min.) |
| Napięcie magazynowania | 22,8 V (typowo) |
| Nominalna pojemność | 6000mAh |
| Waga | 680 gramów |
| Wymiary | Długość: 85,2 mm, Szerokość: 86.5 mm, Wysokość: 135 mm |
Pilot zdalnego sterowania
| Parametr | Opis |
|---|---|
| Model | QE-2 |
| Kanały | 8 |
| Moc transmisji | 18~20 dBm |
| Waga | 294,1 grama |
Gimbal
| Parametr | Opis |
|---|---|
| Kontrolowany kąt | -90° ~ 30° (oś pochylenia) |
| Protokół przesyłania strumieniowego | RTSP (standardowy) |
| Format kodowania | H.264 |
| Rezolucja | 1080P przy 25 klatkach na sekundę |
| Pole widzenia diagonalne (D) | 120° |
| Pole widzenia pionowe (V) | 54° |
| Poziome pole widzenia (H) | 95° |
Transmisja obrazu
| Parametr | Opis |
|---|---|
| Częstotliwość pracy | 2,4 GHz |
| Moc transmisji | 18dBm |
| Zasięg komunikacji | 3 km (bez zakłóceń, bez przeszkód) |
| Zakres obrazu | 1 km (minimalne zakłócenia, brak przeszkód) |
| Maksymalna przepustowość | 40 Mb/s |
Kamera poczwórnej głębi
| Parametr | Opis |
|---|---|
| Akcelerator wizji | Procesor Intel Movidius Myriad X VPU |
| Maksymalna rozdzielczość | 1296x816 |
| Maksymalna liczba klatek na sekundę | 1280x800 przy 120 klatkach na sekundę |
| Typ migawki | Globalna migawka |
| Format kodowania | 8/10-bitowy pojedynczy strumień |
| Pole widzenia | 150° po przekątnej FOV, 127,4° w poziomie FOV, 79,7° w pionie FOV |
| Liczba czujników | 4 (2 z przodu + 2 z tyłu) |
| IMU | BMI270 |
GNSS
| Parametr | Opis |
|---|---|
| Dokładność pozioma | 1,5 m CEP (z SBAS) |
| Dokładność prędkości | 0,05 mili na sekundę |
| Tryb pracy | GPS + GLONASS + BDS + GALILEO + SBAS + QZSS |
Rumak
| Parametr | Opis |
|---|---|
| Model | LK150-2640500 |
| Napięcie wejściowe prądu przemiennego | 100V ~ 240V |
| Napięcie wejściowe DC | 26.4V |
| Waga | 460 gramów |
| Prąd ładowania | 5A |
LiDAR 3D
| Parametr | Opis |
|---|---|
| Model | ŚRODEK-360 |
| Długość fali lasera | 905nm |
| Zakres pomiaru | 40 m przy współczynniku odbicia 10% |
| Pole widzenia | Poziomo 360°, Pionowo -7° ~ 52° |
| Minimalny zasięg | 0,1 mln |
| Częstotliwość punktu | 10 Hz (typowo) |
| Wyjście punktowe | 200 000 punktów/sek. |
| Interfejs danych | 100-bitowa sieć Ethernet-TX |
| Synchronizacja danych | IEEE 1588-2008 (PTP v2), GPS |
| Wbudowany IMU | ICM40609 |
| Napięcie zasilania | 7~27V |
| Wymiary | 65 mm (szer.) x 65 mm (gł.) x 60 mm (wys.) |
| Waga | 115 gramów |
| Temperatura pracy | -20°C ~ 55°C |
Parametry oprogramowania
Komputer pokładowy
| Parametr | Opis |
|---|---|
| Model | Intel Core i5-8365U |
| System | Ubuntu 20.04 |
| Nazwa użytkownika | amov |
| Hasło | amov |
| ROS | intelektualny |
| Otwórz CV | 4.7.0 |
| System pozycjonowania wizualnego | Wersja 1 |
Oprogramowanie Prometheus
| Parametr | Opis |
|---|---|
| Wersja | wersja 2.0 |
| System stacji naziemnej Prometheus | v1.24.11.27 (wersja ostateczna oparta na rekordzie wydania Wiki) |
Bliższe dane
Wydanie badawcze SU17
Dron badawczy o jakości przemysłowej
- Opcjonalny 3D LiDAR: Umożliwia mapowanie, pozycjonowanie i nawigację, unikając przeszkód.
- Oprogramowanie Prometheus Autonomous Drone:Liczne dema umożliwiające szybkie opanowanie sterowania dronem.
- Platforma lotnicza klasy przemysłowej:Stabilny i otwarty, wyznacza nowy standard wydajności dronów badawczych.

Główne cechy
Badania SU17 Platforma rozwoju dronów (określany jako SU17) przyjmuje zintegrowaną konstrukcję, obejmującą kontrolery lotu, komputery pokładowe, moduły SLAM z czterema kamerami, kamery w chmurze i moduły transmisji obrazu dla integracji wysokiego poziomu, znacznie zwiększając stabilność i niezawodność sprzętu. Wyposażony w oprogramowanie autonomicznego drona Prometheus, SU17 obsługuje takie funkcje, jak rozpoznawanie celu, śledzenie i planowanie ścieżki dla różnych scenariuszy sterowania lotem.
Opcjonalnie integruje MID-360 3D LiDAR, połączony z algorytmem FAST-LIO, aby osiągnąć 3D LiDAR SLAM, oferując precyzyjne informacje o wykrywaniu środowiska i pozycjonowaniu. W połączeniu z algorytmem planowania ścieżki EGO-Swarm umożliwia wydajne mapowanie 3D w czasie rzeczywistym i unikanie przeszkód w złożonych środowiskach.




System oprogramowania Prometheus V2
Platforma programistyczna jest oparta na otwartym kodzie źródłowym ROS i Prometheus, oferując bogate funkcjonalności i rozległe drugorzędne interfejsy API programistyczne do wydajnego przeprogramowywania. Zapewnia dostęp do informacji o położeniu, trybów lotu, stanu baterii, danych IMU i innych interfejsów danych stanu i czujnika drona, a także interfejsów sterujących dla położenia, prędkości, przyspieszenia i postawy.
Ponadto zawiera przykłady użycia powiązanych interfejsów API. Ponadto dron posiada funkcje kontroli bezpieczeństwa dla operacji lotniczych (anty-crash), umożliwiając automatyczne zniżanie w nietypowych warunkach, zmniejszając ryzyko awarii i zapewniając bezpieczniejszy proces rozwoju.

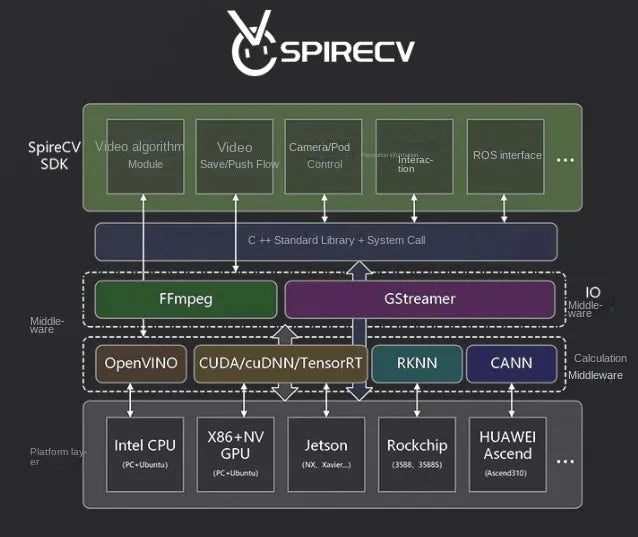
Biblioteka wizji SpireCV
SpireCV Vision Library to SDK przetwarzania obrazu w czasie rzeczywistym, specjalnie zaprojektowany dla inteligentnych systemów UAV. Zapewnia takie funkcjonalności, jak sterowanie gimbalem i kamerą, przechowywanie i przesyłanie strumieniowe wideo, wykrywanie celów, rozpoznawanie i śledzenie.
Ten zestaw SDK ma na celu zapewnienie wysokiej wydajności, niezawodności i usprawnionego interfejsu dla programistów inteligentnych systemów UAV. Dzięki bogatemu w funkcje rozwiązaniu przetwarzania wizualnego umożliwia programistom wydajną implementację różnych złożonych aplikacji opartych na wizji.
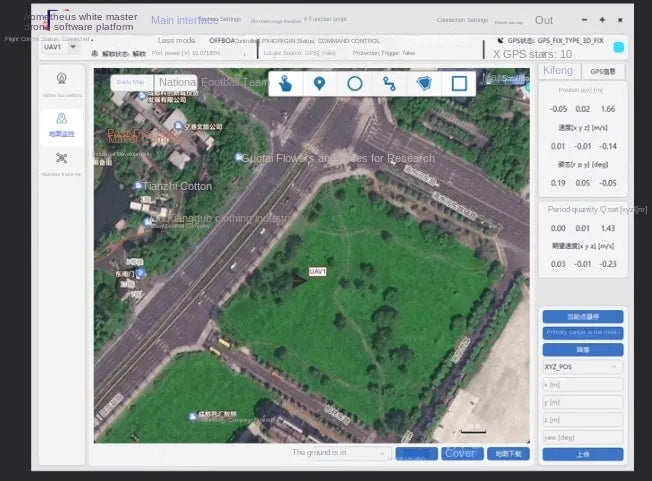
Stacja naziemna Prometeusz
Prometheus Ground Station to interfejs interakcji człowiek-dron opracowany na podstawie systemu Prometheus, zbudowany przy użyciu technologii Qt. Umożliwia szybką replikację funkcjonalności systemu Prometheus, zapewniając monitorowanie w czasie rzeczywistym i wizualizację 3D statusu drona i danych sterujących.
Za pośrednictwem stacji naziemnej użytkownicy mogą wykonywać polecenia, takie jak start za pomocą jednego kliknięcia, zawisanie nad bieżącą pozycją, lądowanie i kontrola pozycji. Ponadto system obsługuje niestandardowe przyciski funkcyjne do inicjowania zdefiniowanych przez użytkownika skryptów lub wysyłania niestandardowych wiadomości, co znacznie poprawia wygodę, wydajność i skalowalność operacji użytkownika.
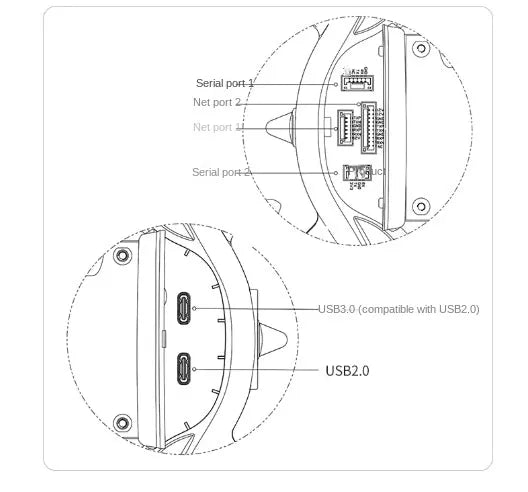
Potężna ekspansja
Porty rozszerzeń sprzętowych
-
Port szeregowy 1
-
Port szeregowy 2
-
Port sieciowy 1
-
Port sieciowy 2
-
Porty USB:
- USB 3.0 (kompatybilny z USB 2.0)
- USB 2.0
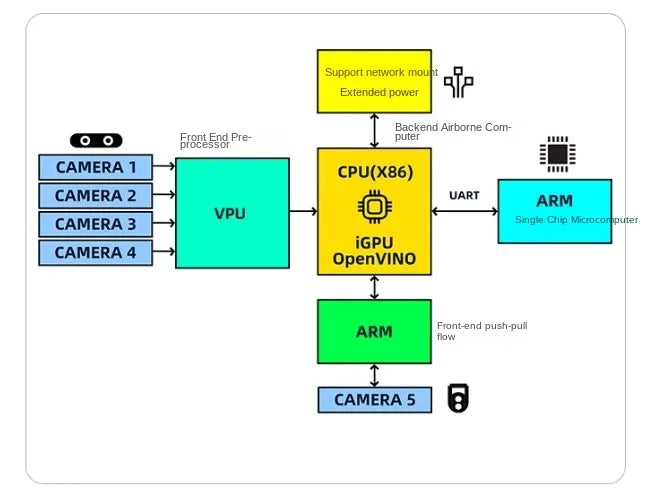
Struktura sprzętowa
Na zdjęciu przedstawiono architekturę sprzętową drona SU17, podkreślając integrację różnych komponentów w celu zapewnienia zaawansowanego przetwarzania danych i sterowania systemem:
-
Kamery (Kamera 1-4):
Połączony z VPU (jednostka przetwarzania obrazu) do wstępnego przetwarzania front-end. -
WPU:
Przetwarza dane wizualne z wielu kamer i przesyła je do jednostek przetwarzających. -
Procesor (X86) z iGPU i OpenVINO:
Pełni funkcję podstawowej jednostki obliczeniowej do przetwarzania zaplecza, obsługując możliwości rozbudowy o sieć w celu zwiększenia mocy obliczeniowej. -
Mikrokontroler jednoprocesorowy ARM:
Współpracuje z procesorem za pośrednictwem interfejsu UART, zapewniając dodatkowe funkcje sterowania. -
Front-End Pipelining i Kamera 5:
Zarządzany przez dedykowany procesor ARM w celu dalszego uproszczenia danych.
Ta struktura integruje wiele jednostek przetwarzania, obsługując analizę obrazu w czasie rzeczywistym, zaawansowane zadania obliczeniowe i bezproblemową komunikację między komponentami sprzętowymi. Zapewnia ona wydajną obsługę złożonych operacji w aplikacjach badawczo-rozwojowych.
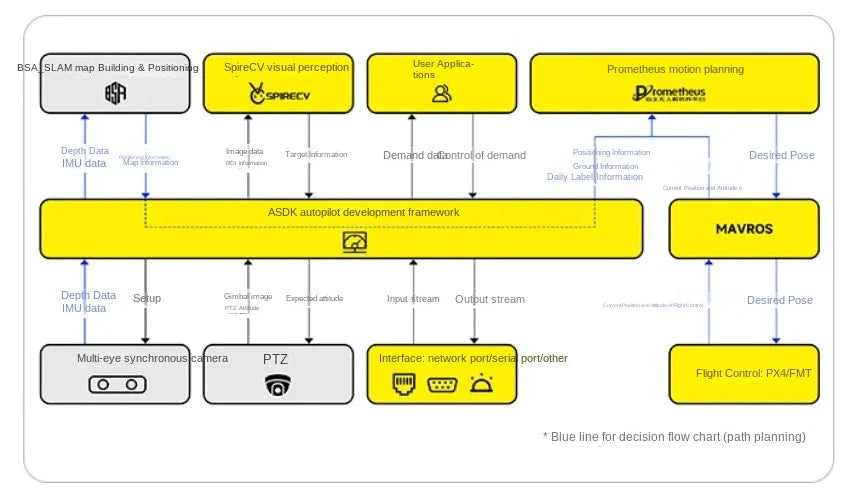
Struktura oprogramowania
Schemat ilustruje architekturę oprogramowania drona SU17, podkreślając integrację różnych systemów w celu zapewnienia autonomicznej funkcjonalności:
-
BSA_SLAM (mapowanie i lokalizacja):
- Dostarcza danych dotyczących mapowania przestrzennego i pozycjonowania.
- Integruje dane z czujnika głębokości i IMU, zapewniając dokładną percepcję otoczenia.
-
SpireCV Wizja Percepcja:
- Przetwarza dane wizualne, w tym wykrywanie obiektów, informacje o obszarze zainteresowania (ROI) i śledzenie celu.
-
Aplikacje użytkownika:
- Interfejsy do zadań sterowanych przez użytkownika, takich jak wizualizacja danych i wprowadzanie poleceń.
-
Planowanie ruchu Prometheus:
- Zarządza planowaniem trajektorii na podstawie danych o położeniu, prędkości i celu.
-
ASDK Autonomous Driving Framework:
- Pełni funkcję centralnej warstwy przetwarzania, zarządzając przepływem danych pomiędzy czujnikami, kamerami, modułami chmury i interfejsami zewnętrznymi.
- Obsługuje wiele kanałów wejścia/wyjścia (np. porty sieciowe, porty szeregowe).
-
MAVROS:
- Komunikuje się z systemami sterowania lotem (PX4/FMT) w celu kontroli stanu i położenia lotu.
-
Moduł chmury i kamery Multi-Sync:
- Integruje dane w chmurze w celu zapewnienia zaawansowanego przetwarzania.
- Synchronizuje dane wizualne, zapewniając precyzję operacji.
Niebieskie linie:Reprezentuj ścieżki decyzyjne dla planowania trajektorii.
Architektura ta charakteryzuje się modułową, rozszerzalną konstrukcją, umożliwiającą bezproblemową komunikację między różnymi komponentami sprzętowymi i programowymi, co przekłada się na niezawodne działanie drona.
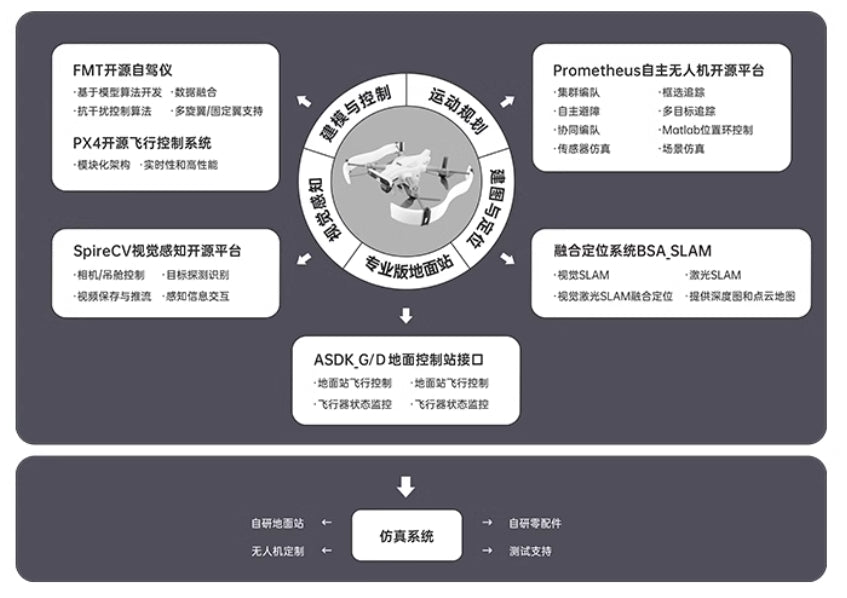
Inteligentna otwartość: zintegrowane rozwiązanie systemowe UAV
Na schemacie przedstawiono kompleksową i otwartą architekturę systemów dronów, kładąc nacisk na modułowość i integrację różnych komponentów:
-
Główne komponenty:
- FMT Autopilot z otwartym kodem źródłowym:Zapewnia niezawodną kontrolę lotu w oparciu o modułową konstrukcję, obsługując różne środowiska i integrując dane.
- System sterowania lotem PX4: Zapewnia stabilność i obsługuje zaawansowaną personalizację modułową.
- Platforma Percepcji Wizji SpireCV:Koncentruje się na przetwarzaniu obrazu, w tym wykrywaniu obiektów, śledzeniu i strumieniowym przesyłaniu wideo w czasie rzeczywistym.
-
Kluczowe ramy:
- Autonomiczna platforma UAV Prometheus:Obejmuje sterowanie wieloma dronami, planowanie ruchu, wspólną nawigację i symulacje w warunkach rzeczywistych.
- System BSA_SLAMŁączy technologię SLAM opartą na wizji i technologię SLAM opartą na LiDAR, umożliwiając precyzyjne pozycjonowanie i mapowanie.
- Interfejs sterowania stacją naziemną ASDK G/D:Umożliwia bezproblemową komunikację między stacjami naziemnymi i bezzałogowymi statkami powietrznymi w celu monitorowania i wprowadzania zmian w czasie rzeczywistym.
-
Integracja przepływu pracy:
- Podkreśla procesy takie jak planowanie ruchu, mapowanie środowiska i autonomiczna nawigacja.
- Integracja z profesjonalnymi stacjami naziemnymi w celu kontroli trajektorii, omijania przeszkód i zarządzania danymi w czasie rzeczywistym.
-
Wsparcie symulacji:
- Zawiera system symulacyjny do testowania misji autonomicznych, sterowania bezzałogowymi statkami powietrznymi i walidacji komponentów.
System ten stanowi przykład nowatorskiego rozwiązania w zakresie rozwoju autonomicznych bezzałogowych statków powietrznych, oferując skalowalne możliwości prowadzenia badań, przeprowadzania zastosowań i testowania w różnych scenariuszach.
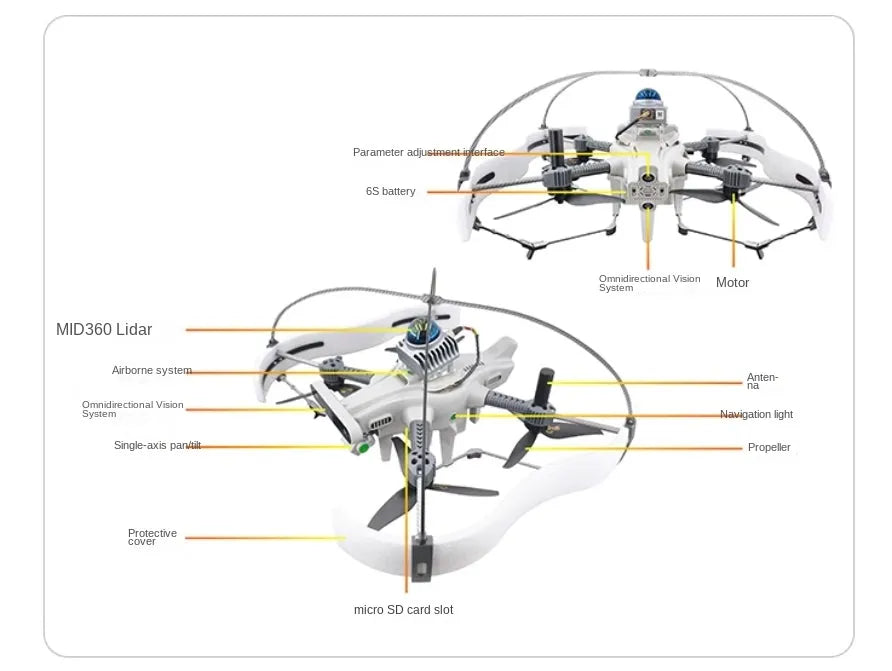
elementy konstrukcyjne drona badawczego SU17, podkreślające jego stabilność i zaawansowaną konstrukcję. Kluczowe cechy obejmują LiDAR MID360 do precyzyjnego mapowania, wielokierunkowy system wizyjny dla całościowego postrzegania środowiska, gimbal jednoosiowy dla stabilnego obrazowania i solidnego Bateria 6S dla rozszerzonej mocy. Inne niezbędne komponenty obejmują układ śmigłowy, antena, światła nawigacyjnei Gniazdo na kartę micro SD do przechowywania danych. Projekt integruje najnowocześniejszy sprzęt, zapewniając niezawodność i wysoką wydajność dla różnych zastosowań badawczych.
Related Collections