Ti5 CRA-RI50-70-PRO-XX Zintegrowane złącze robota – przekładnia harmoniczna, wał drążony, 24–48 V, 150 W, 17-bitowy koder, CAN/EtherCAT
Ti5 CRA-RI50-70-PRO-XX Zintegrowane złącze robota – przekładnia harmoniczna, wał drążony, 24–48 V, 150 W, 17-bitowy koder, CAN/EtherCAT
Ti5 Robot
Nie można załadować gotowości do odbioru
Przegląd
Robot Ti5 CRA-RI50-70-PRO-XX to kompaktowy, zintegrowany przegub robota z pustym wałem, który łączy w sobie precyzyjny reduktor harmonicznych, silnik bezramkowy z momentem obrotowym, Napęd FOC, I enkoder absolutny w jednym module. Z Średnica zewnętrzna 80 mm, Otwór przelotowy 10 mm, Moc 150 W, I 24–48 V podaż, dostarcza do 34 N·m szczyt (zależne od stosunku) z niemal zerowy luz I niski poziom hałasu. Komunikacja jest możliwa do wyboru pomiędzy MÓC I EtherCAT; pojedyncze lub podwójne enkodery i hamulec elektromagnetyczny Dostępny jest wariant (-B). To złącze jest przeznaczone do cobotów, manipulatorów mobilnych, przegubów pan-tilt, urządzeń przemysłowych, robotów do inspekcji zasilania i platform morskich.
Główne cechy
-
Wszystko w jednym stawie: reduktor harmonicznych + silnik momentu obrotowego BLDC + sterownik FOC + enkoder absolutny w szczelnej, kompaktowej obudowie.
-
Wał pusty:Przepust centralny o średnicy 10 mm dla kabli/linii powietrznych.
-
Wysoka dokładność informacji zwrotnej: 17-bitowy enkoder absolutny, pamięć wieloobrotowa wyłączana; pojedynczy/podwójny enkoder opcje.
-
Niski luz wyjściowy:stopień harmoniczny z ~10–20 sekund łuku negatywna reakcja (według współczynnika).
-
Cichy &wzmacniacz; gładki: silnik o dużym momencie obrotowym zapewniający stabilność przy niskich prędkościach i niski poziom hałasu.
-
Opcje interfejsu: MÓC Lub EtherCAT autobus; opcjonalnie hamulec postojowy (przyrostek modelu -B).
-
Możliwość dostosowania:wersje wodoodporne/niskotemperaturowe dostępne fabrycznie.
Modele &Opcje wzmacniacza
-
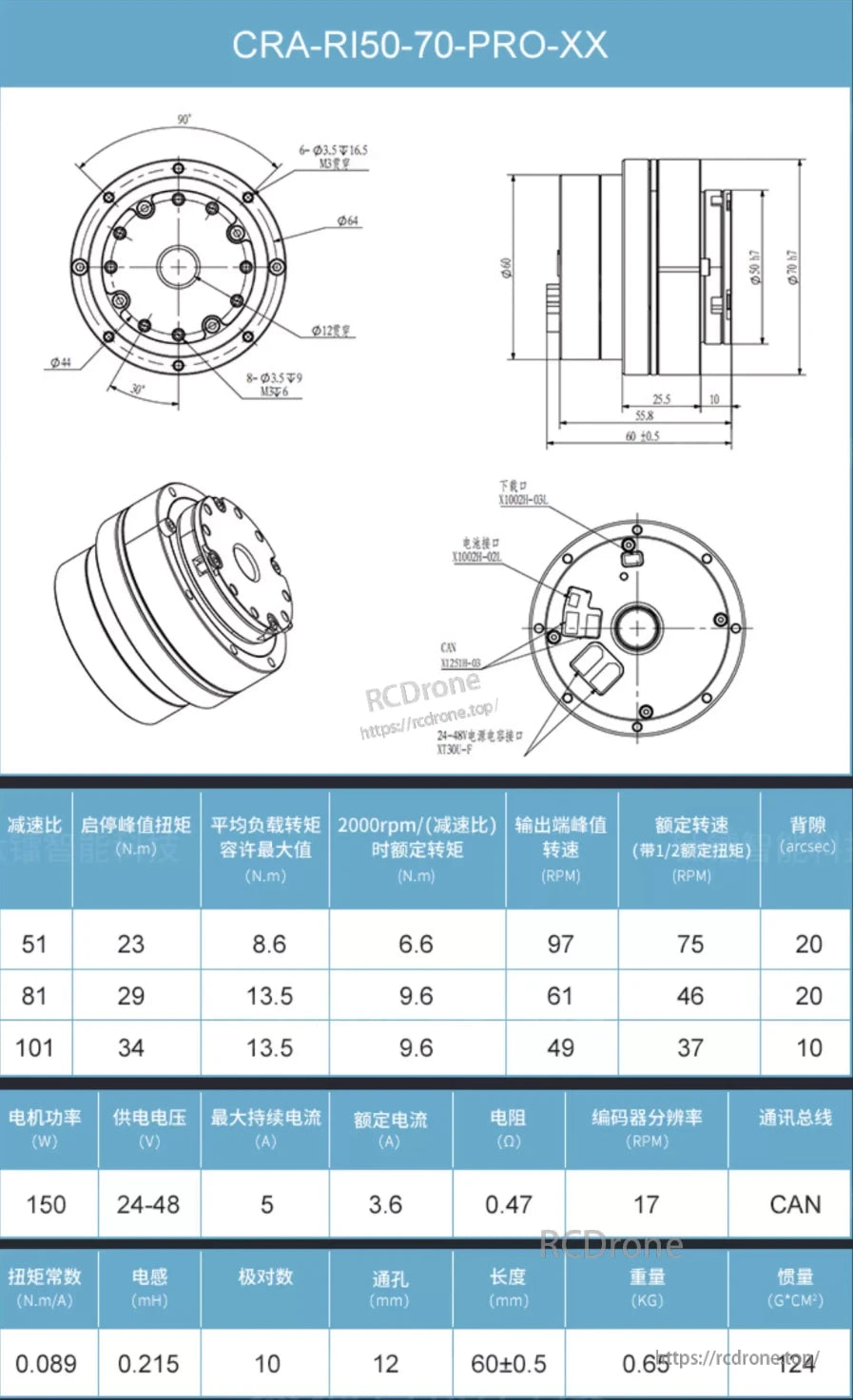
CRA-RI50-70-PRO-XX — standardowy, bez hamulca (≈ 60 ± 0,5 mm długość, ≈0,65 kg, bezwładność ≈ 124 g·cm²)
-
CRA-RI50-70-PRO-XX-B — z hamulcem (długość ≈81,7 ± 0,5 mm)
-
Autobus: MÓC Lub EtherCAT
-
Koder: Pojedynczy Lub Podwójny koder
Wydajność znamionowa według przełożenia
| Przełożenie | Maksymalny moment obrotowy start/stop (N·m) | Maksymalny średni moment obciążenia (N·m) | Moment znamionowy @ 2000 obr./min/stosunek (N·m) | Maksymalna prędkość wyjściowa (obr./min) | Prędkość znamionowa przy ½ obr./min | Luz (sekundy łuku) |
|---|---|---|---|---|---|---|
| 51:1 | 23 | 8.6 | 6.6 | 97 | 75 | 20 |
| 81:1 | 29 | 13,5 | 9.6 | 61 | 46 | 20 |
| 101:1 | 34 | 13,5 | 9.6 | 49 | 37 | 10 |
Uwagi: Dane dotyczące prędkości wyjściowej/momentu obrotowego podano na wyjściu reduktora. Niższy luz dotyczy wariantu 101:1.
Elektryczny &dane silnika
-
Moc: 150 W
-
Napięcie zasilania: 24–48 V prądu stałego
-
Maksymalny prąd ciągły: 5 A | Prąd znamionowy: 3,6 A | Rezystancja fazowa: 0.47 omów
-
Stała momentu obrotowego: 0,089 N·m/A | Indukcyjność: 0,215 mH | Pary biegunów: 10
-
Rozdzielczość enkodera: 17-bitowy absolutny (pamięć wyłączania)
-
Sterowanie zorientowane polowo (FOC) zintegrowany
Interfejs mechaniczny
-
Średnica zewnętrzna: Ø80 mm
-
Koło śrubowe: Ø64 mm (kołnierz przedni)
-
Otwór przelotowy: Ø10 mm
-
Długość całkowita: 60 ± 0,5 mm (standardowy) / 81,7 ± 0,5 mm (-B z hamulcem)
-
Masa: ~0,65 kg (standard)
-
Bezwładność (wirnik): ~124 g·cm² (standard)
-
Przednia powierzchnia umożliwia montaż wielu elementów złącznych M3, a szczegółowy układ otworów odpowiada rysunkowi mechanicznemu.
Łączność
-
Autobus: MÓC Lub EtherCAT
-
Warianty: Pojedynczy enkoder / Podwójny enkoder
-
Opcja hamulca: -B modele posiadają zintegrowany hamulec postojowy.
Typowe zastosowania
-
Ramiona robotyczne współpracujące i stacjonarne, roboty usługowe
-
Gimbale pan-tilt i systemy kamer
-
Mobilne pojazdy UGV do manipulacji i inspekcji elektrycznej
-
Moduły automatyki przemysłowej i sprzęt morski
Co jest wliczone
-
CRA-RI50-70-PRO-XX złącze zintegrowane (wybrany stosunek &opcje)
-
Złącza łączące &wzmacniacz; podstawowe śruby (za zestaw)
-
Rysunek mechaniczny &wzmacniacz; wyprowadzenia (cyfrowe)
Kod zamówienia (przykład)
CRA-RI50-70-PRO-XX-(B, T, 2E, IPXX)
-
XX: przełożenie (51/81/101)
-
B: z hamulcem (puste = bez hamulca)
-
T/2E:opcje pojedynczego/podwójnego enkodera
-
IPXX:opcjonalna wodoodporność (na życzenie)
Bliższe dane

Specyfikacja przegubu robota CRA-RI50-70-PRO-XX: silnik 150 W, napięcie 24–48 V, magistrala CAN, przełożenia 51–101, maksymalny moment obrotowy do 34 Nm, długość 60 ± 0,5 mm, waga 0,65 kg, moment bezwładności 124 g·cm².
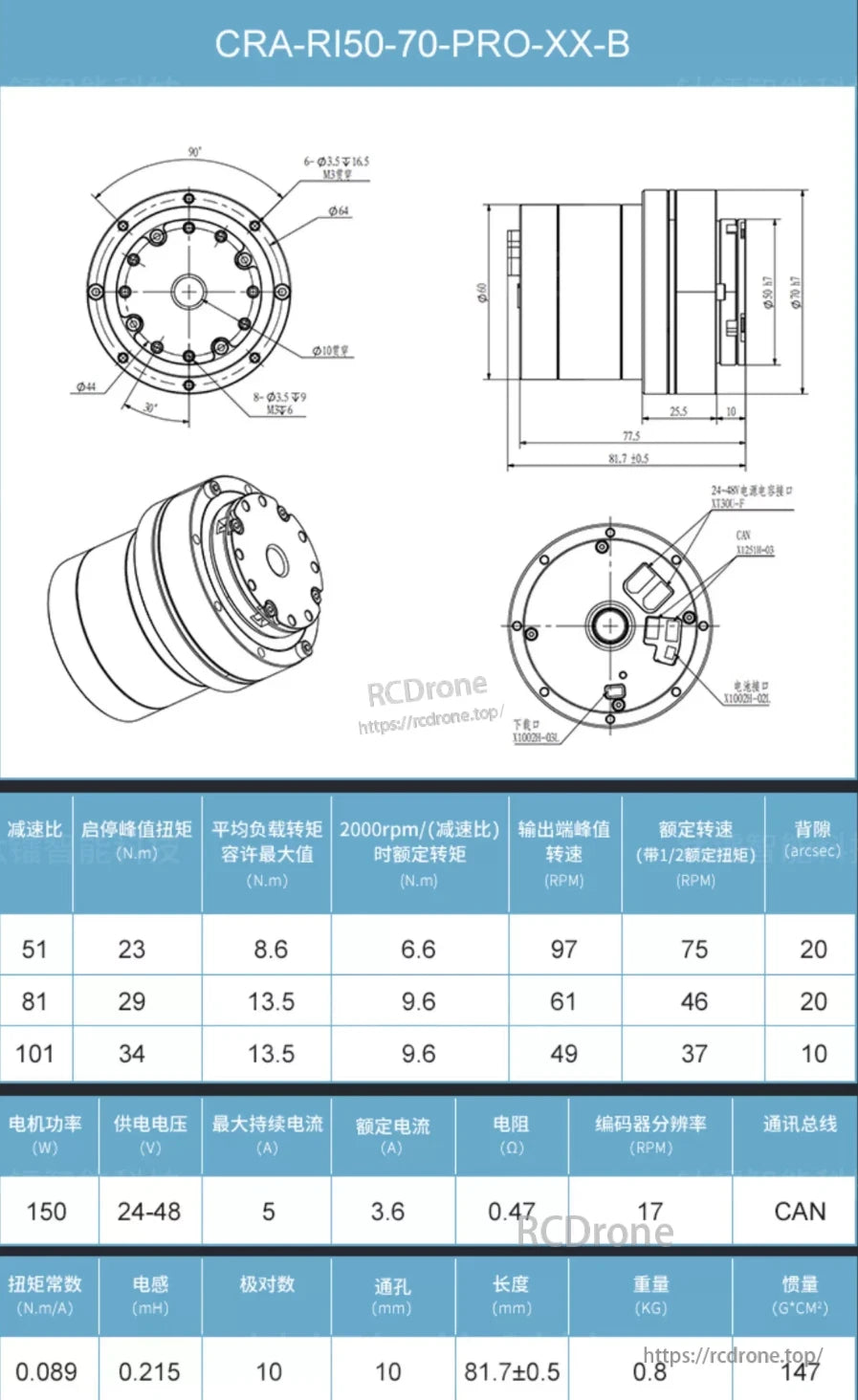
Przegub robotyczny o przełożeniu 51, 81 lub 101, mocy 150 W, zasilaniu 24–48 V, komunikacji CAN, rozdzielczości enkodera 17 obr./min, długości 81,7 ± 0,5 mm i wadze 0,8 kg.
Related Collections