






Zintegrowany siłownik przegubowy Ti5 Robot CRA-RI100-142-PRO-XX, 1 kW, 24–48 V, do 169 N·m, IP65, CAN/EtherCAT, 51–161:1, opcjonalny hamulec
Zintegrowany siłownik przegubowy Ti5 Robot CRA-RI100-142-PRO-XX, 1 kW, 24–48 V, do 169 N·m, IP65, CAN/EtherCAT, 51–161:1, opcjonalny hamulec
Ti5 Robot
Nie można załadować gotowości do odbioru
Przegląd
Ten Robot Ti5 CRA-RI100-142-PRO-XX to kompaktowy, zintegrowany siłownik przegubowy, który łączy w sobie serwosilnik z magnesami trwałymi, precyzyjny reduktor, enkoder i uszczelnioną obudowę. Jest częścią serii PRO zaprojektowanej dla humanoidy, egzoszkielety, coboty, pojazdy AGV i mechanizmy przemysłowe, z udziałem wysoka gęstość momentu obrotowego, niski poziom hałasu i ochrona IP65. Interfejs kontrolera jest wybieralny (CAN lub EtherCAT), informacja zwrotna może być pojedynczy lub podwójny enkoderi hamulec postojowy jest dostępny jako opcja. A Wał pusty 32 mm ułatwia prowadzenie kabli i przewodów pneumatycznych przez złącze.
Główne cechy
-
Moment obrotowy znamionowy do 169 N·m (zależne od stosunku) z płynnym, nisko-ząbkowanym wyjściem
-
Uszczelniony IP65 obudowa zapewniająca pyłoszczelność i wodoodporność
-
24–48 V prądu stałego, 1 kW klasa PMSM o wysokiej sprawności
-
CAN lub EtherCAT magistrala polowa; pojedynczy/podwójny enkoder inkrementalny (17-bitowy)
-
Opcjonalny hamulec postojowy (-B) do bezpiecznego pozycjonowania i przytrzymywania przy wyłączonym zasilaniu
-
Wyjście wału pustego (Ø32 mm); przyjazny dla okablowania przelotowego
-
Długie życie &wzmacniacz; wysoka niezawodność; niski poziom hałasu, wysoka precyzja
-
Wstępnie okablowana wiązka (5 metrów) do szybkiej integracji
Specyfikacje
Elektryczny &wzmacniacz; Ogólne
-
Model: CRA-RI100-142-PRO-XX (-B = z hamulcem)
-
Typ silnika: Synchroniczny z magnesami trwałymi
-
Moc znamionowa: 1000 W
-
Napięcie zasilania: 24–48 V prądu stałego
-
Prąd znamionowy: 15,8 A | Maksymalny prąd ciągły: 16,9 A
-
Rezystancja fazowa: 0,12 Ω | Indukcyjność: 0,3 mH
-
Pary biegunów: 8 | Stała momentu obrotowego: 0,175 N·m/A
-
Koder: Przyrostowy, 17-bit, pojedynczy lub podwójny
-
Autobus: MÓC (możliwość wyboru EtherCAT)
-
Ochrona: IP65
-
Zakres obrotu: 60°
-
Otwór przelotowy: Ø32 mm
-
Środowisko pracy: aż do 60 °C
-
Długość kabla: 5 metrów
Obwiednia mechaniczna
-
Bez hamulca: Długość 95,7 ± 0,5 mm, masa 3,8 kg, bezwładność wirnika 3601 g·cm²
-
Z hamulcem (-B): Długość 115,7 ± 0,5 mm, masa 4,5 kg, bezwładność wirnika 4237 g·cm²
Uwaga: „100-142” w nazwie modelu oznacza nominalną klasę średnicy zewnętrznej i serię długości osiowej.
Wydajność według współczynnika redukcji — Bez hamulca
| Stosunek | Maksymalny moment obrotowy start/stop (N·m) | Maksymalny dopuszczalny średni moment obciążenia (N·m) | Moment znamionowy przy 2000 obr./min/stosunek (N·m) | Maksymalna prędkość wyjściowa (obr./min) | Prędkość znamionowa przy ½ momentu znamionowego (obr./min) | Luz (sekundy łuku) |
|---|---|---|---|---|---|---|
| 51:1 | 267 | 120 | 94 | 55 | 44 | 20 |
| 81:1 | 376 | 185 | 146 | 37 | 29 | 20 |
| 101:1 | 411 | 267 | 169 | 29 | 22 | 10 |
| 121:1 | 436 | 267 | 169 | 24 | 18 | 10 |
| 161:1 | 459 | 267 | 169 | 18 | 12 | 10 |
Wydajność według współczynnika redukcji — Z hamulcem (-B)
Parametry momentu obrotowego i prędkości są identyczne jak w wersji bez hamulca, natomiast wymiary/waga/bezwładność różnią się (patrz powyżej).
| Stosunek | Maksymalny moment obrotowy start/stop (N·m) | Maksymalny dopuszczalny średni moment obciążenia (N·m) | Moment znamionowy przy 2000 obr./min/stosunek (N·m) | Maksymalna prędkość wyjściowa (obr./min) | Prędkość znamionowa przy ½ momentu znamionowego (obr./min) | Luz (sekundy łuku) |
|---|---|---|---|---|---|---|
| 51:1 | 267 | 120 | 94 | 55 | 44 | 20 |
| 81:1 | 376 | 185 | 146 | 37 | 29 | 20 |
| 101:1 | 411 | 267 | 169 | 29 | 22 | 10 |
| 121:1 | 436 | 267 | 169 | 24 | 18 | 10 |
| 161:1 | 459 | 267 | 169 | 18 | 12 | 10 |
Aplikacje
-
Roboty humanoidalne: stawy barkowe/biodrowe/kolanowe/skokowe wymagające uszczelnionego działania o wysokim momencie obrotowym
-
Roboty współpracujące (coboty): płynny, cichy ruch z redundancją enkodera
-
Egzoszkielety &i urządzenia rehabilitacyjne: kompaktowe złącza o wysokim momencie obrotowym przytrzymanie przy wyłączonym zasilaniu (-B)
-
Zawieszenie kardanowe &wzmacniacz; jednostki pan-tilt: precyzyjne pozycjonowanie z niewielkim luzem
-
Pojazdy AGV &i maszyny specjalne: chropowaty IP65 złącza do miejsc zakurzonych i wilgotnych
-
Automobilowy &i mechanizmy morskie: uszczelnione sterowanie dla pomocniczych układów ruchu
Bliższe dane

Specyfikacja siłownika CRA-RI100-142-PRO-XX: przełożenia 51-161, 267-459 N.m maksymalny moment obrotowy, silnik 1000 W, zasilanie 24-48 V, magistrala CAN, waga 3,8 kg, moment bezwładności 3601 g·cm², rozdzielczość enkodera 17 obr./min.
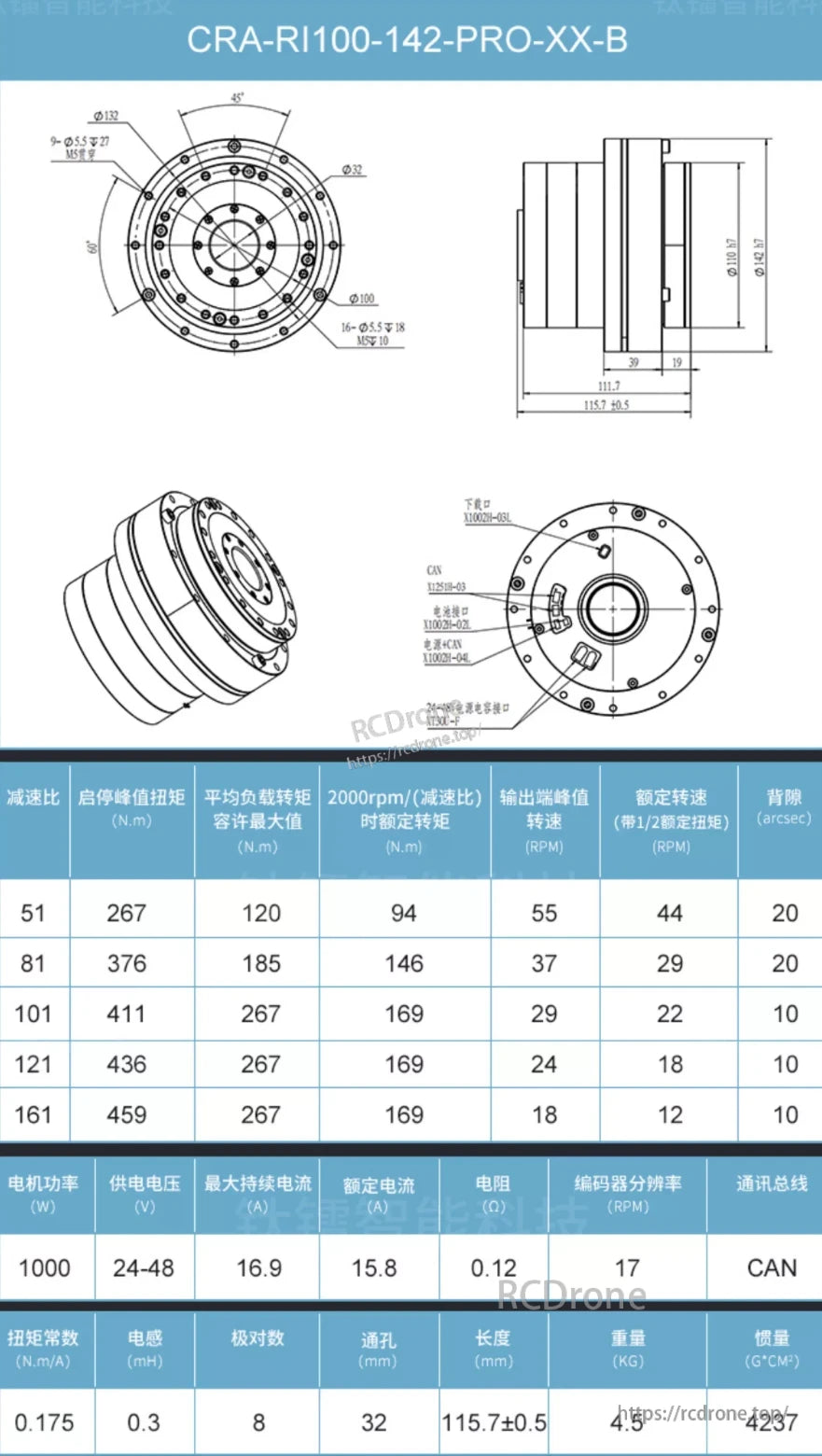
Dane techniczne siłownika CRA-RI100-142-PRO-XX-B: silnik 1000 W, napięcie 24–48 V, prąd znamionowy 15,8 A, rozdzielczość enkodera 17 obr./min, magistrala CAN, waga 4,5 kg, długość 115,7 mm, wiele przełożeń z danymi dotyczącymi momentu obrotowego i prędkości.
Related Collections






