








Ti5 ROBOT CRA-RI30-40-PRO Moduł silnika przegubu 36W 24-48V Enkoder 16Bit Redukcja 51/101
Ti5 ROBOT CRA-RI30-40-PRO Moduł silnika przegubu 36W 24-48V Enkoder 16Bit Redukcja 51/101
Ti5 ROBOT
Nie można załadować gotowości do odbioru
Przegląd
Ti5 ROBOT CRA-RI30-40-PRO to lekki moduł silnika zaprojektowany do działania stawów w robotyce. Widoczne cechy produktu to: „Lekki moduł stawowy”, „Kluczowy przełom w sprzęcie”, „Lekki: mały rozmiar, potężna wydajność” oraz „Wysoka gęstość momentu obrotowego (kluczowe wskaźniki wydajności i cechy lekkie)”.
W celu uzyskania wskazówek dotyczących konfiguracji i wsparcia technicznego skontaktuj się z https://rcdrone.top/ lub wyślij e-mail na adres [email protected].
Kluczowe cechy
Lekki
- Ultra-lekki z większą użytecznością.
- Zmniejsza wagę o ponad 1/3.
- Znacząco zmniejsza zużycie energii podczas pracy.
Silniejsza wydajność
- Przemysłowe standardy wydajności.
- Gęstość momentu obrotowego jest dwukrotnie wyższa niż w podobnych produktach.
- Klasa motoryzacyjna, antystatyczna, antywibracyjna.
Modularyzacja
- Sześć modułów jest organicznie zintegrowanych.
- Trzy serie mogą kompleksowo dostosować się do klientów w różnych scenariuszach.
- Znacząco zmniejsza trudności produkcyjne; poprawia efektywność produkcji.
Skład modułu wewnętrznego (oznaczone)
- Tylny pokrywka silnika
- Płytka kontrolna
- Enkoder
- Obudowa statora
- Wirnik silnika
- Stator silnika
- Reduktory harmoniczne
- Pokrywa Flexspline
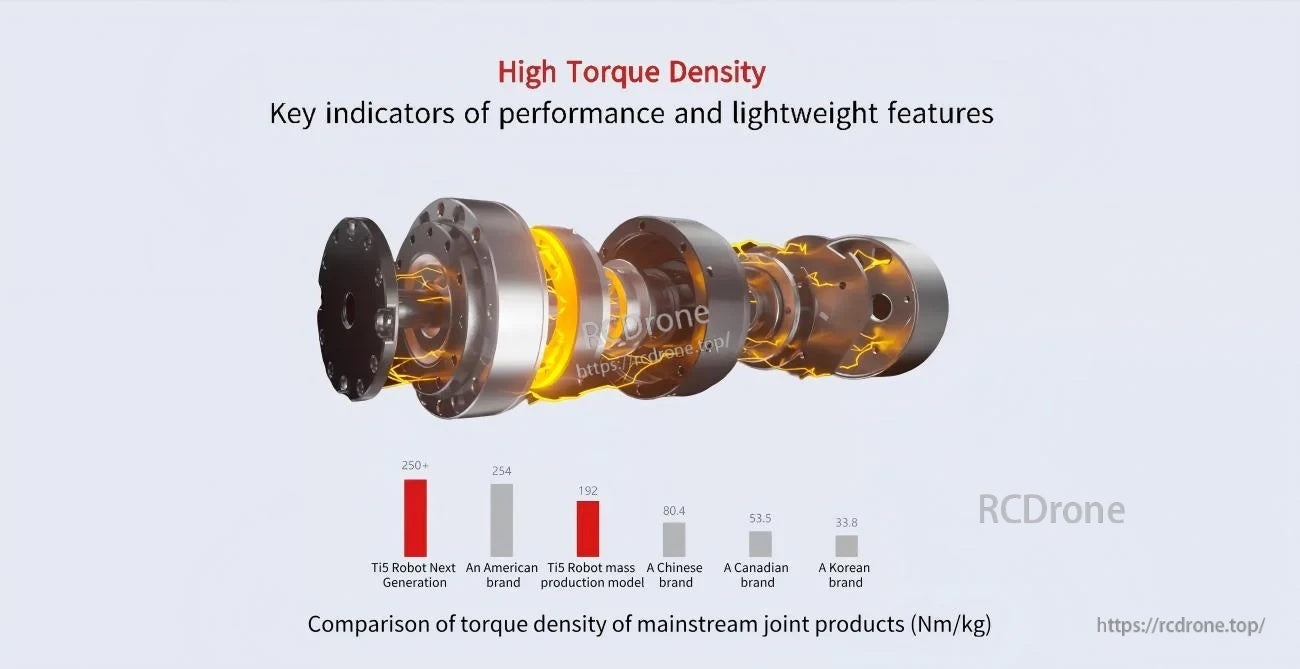
Porównanie gęstości momentu obrotowego (Nm/kg)
„Porównanie gęstości momentu obrotowego produktów jointowych (Nm/kg)” wartości pokazane:
- Robot Ti5 Nowa Generacja: 250+
- Amerykańska marka: 254
- Model masowej produkcji Robota Ti5: 192
- Chińska marka: 80.4
- Kanadyjska marka: 53.5
- Koreańska marka: 33.8
Oświadczenia dotyczące masowej produkcji i rozwoju (jak pokazano)
- Przewaga w masowej produkcji w branży.
- Cały sprzęt podstawowy może być kontrolowany, a wskaźnik lokalizacji może osiągnąć 100%.
- Posiada kompletny zestaw narzędzi programowych do rozwoju robotów, co pomaga przyspieszyć badania i rozwój.
Aplikacje
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
Specyfikacje
| Parametr | Wartość |
|---|---|
| Model silnika | CRA-RI30-40-PRO-XX / CRA-RI30-40-PRO-XX-B |
| Stosunek redukcji | 51 / 101 |
| Moment obrotowy szczytowy przy rozruchu i zatrzymaniu | 3.3 / 4.8 N.m |
| Maksymalny dopuszczalny średni moment obrotowy | 2.3 / 3.3 N.m |
| 2000 Rpm/(Stosunek redukcji) Moment obrotowy nominalny przy tej prędkości | 1.8 / 2.4 N·m |
| Szczytowa prędkość obrotowa na końcu wyjścia | 118 / 59 RPM |
| Prędkość nominalna | 90 / 45 RPM |
| Moc silnika | 36 W |
| Napięcie zasilania | 24-48 V |
| Maksymalne ciągłe natężenie | 2 A |
| Natężenie nominalne | 1 A |
| Rozdzielczość enkodera | 16 Bit |
| Prześwit z tyłu | 40 / 40 arcsec |
| Stała momentu | 0.024 N·m/A |
| Otwór | 6 mm |
| Długość: Bez hamulca / Z hamulcem | 60±0.5 mm / 78.6±0.5 mm |
| Waga: Bez hamulca / Z hamulcem | 0.19 kg / 0.27 kg |
| Inercja: Bez hamulca / Z hamulcem | 27.4 g·cm² / 45.1 g·cm² |
Instrukcje
Szczegóły

Stworzony dla kompaktowych stawów robotycznych, seria CRA-RI30-40-PRO koncentruje się na wysokiej wydajności w lekkiej formie.

Zintegrowana architektura modułowa łączy wiele funkcjonalnych sekcji w jeden moduł gotowy do montażu, aby uprościć budowę.

Ściśle zintegrowany układ wewnętrzny wspiera gotowość do produkcji oraz kompletny zestaw narzędzi do rozwoju robotów.

Gęstość momentu obrotowego jest podkreślana jako kluczowy wskaźnik lekkiej wydajności dla modułów stawowych.
Related Collections








