






Moduł silnika stawu Ti5 ROBOT CRA-RI40-52-PRO Silnik 24-48V 90W Przełożenie 51/101 Enkoder 16Bit
Moduł silnika stawu Ti5 ROBOT CRA-RI40-52-PRO Silnik 24-48V 90W Przełożenie 51/101 Enkoder 16Bit
Ti5 ROBOT
Nie można załadować gotowości do odbioru
Przegląd
Ti5 ROBOT Silnik CRA-RI40-52-PRO to lekki moduł silnikowy do stawów robotycznych. Wyróżniony tekst zawiera: „LEKKI MODUŁ STAWOWY”, „Kluczowy przełom w sprzęcie”, „Lekki” oraz „Mały rozmiar, potężna wydajność”.
Kluczowe cechy
Lekki / mały rozmiar
- Ultra-lekka konstrukcja z większą użytecznością.
- Redukcja wagi o ponad 1/3.
- Znacząco zmniejsza zużycie energii podczas pracy.
Wydajność
- Przemysłowe standardy wydajności.
- Gęstość momentu obrotowego jest dwukrotnie wyższa niż w podobnych produktach.
- Klasa motoryzacyjna, antystatyczny, antywibracyjny.
Modularyzacja
- Sześć modułów jest organicznie zintegrowanych.
- Trzy serie kompleksowo dostosowują się do klientów w różnych scenariuszach.
- Znacząco zmniejsza trudności produkcyjne; poprawia efektywność produkcji.
Struktura (etykiety widoku eksplodowanego)
- Tylny pokrywka silnika
- Płytka kontrolna
- Enkoder
- Obudowa statora
- Wirnik silnika
- Stator silnika
- Reduktory harmoniczne
- Pokrywa Flexspline
Produkcja masowa / oświadczenia platformy
- Przewaga w produkcji masowej na poziomie branżowym.
- Cały sprzęt podstawowy może być kontrolowany, a wskaźnik lokalizacji może osiągnąć 100%.
- Kompletny zestaw narzędzi programowych do rozwoju robotów, pomagający przyspieszyć badania i rozwój.
- Platforma szybkiego rozwoju robota Ti5 łączy sprzęt i oprogramowanie, z otwartym SDK wspomnianym w kontekście przyszłej dostępności.
Porównanie gęstości momentu obrotowego (Nm/kg)
- 250+: Ti5 Robot Nowej Generacji
- 254: Amerykańska marka
- 192: Model masowej produkcji robota Ti5
- 80.4: Chińska marka
- 53.5: Kanadyjska marka
- 33.8: Koreańska marka
Tekst podpisu: „Porównanie gęstości momentu obrotowego produktów z mainstreamowych stawów (Nm/kg)”.
W celu uzyskania wskazówek dotyczących wyboru, pytań dotyczących dokumentacji lub wsparcia w integracji, skontaktuj się z https://rcdrone.top/ lub wyślij e-mail na [email protected].
Zastosowania
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
Specyfikacje
| Parametr | Wartość |
|---|---|
| Model silnika | CRA-RI40-52-PRO-XX / CRA-RI40-52-PRO-XX-B |
| Przełożenie | 51 / 101 |
| Moment obrotowy szczytowy przy rozruchu i zatrzymaniu | 8.3 / 11 N.m |
| Maksymalny dopuszczalny średni moment obrotowy | 5.5 / 8.9 N.m |
| 2000 Rpm/(Przełożenie) Moment obrotowy nominalny przy tej prędkości | 3.5 / 5 N·m |
| Szczytowa prędkość obrotowa na wyjściu | 118 / 59 RPM |
| Prędkość nominalna | 80 / 40 RPM |
| Moc silnika | 90 W |
| Napięcie zasilania | 24-48 V |
| Maksymalne ciągłe natężenie | 3 A |
| Natężenie nominalne | 2 A |
| Rozdzielczość enkodera | 16 Bit |
| Prześwit z tyłu | 40 / 30 arcsec |
| Stała momentu | 0.05 N·m/A |
| Otwór | 12 mm |
| Długość: Bez hamulca / Z hamulcem | 62 ±0.5 mm / 82 ±0.5 mm |
| Waga: Bez hamulca / Z hamulcem | 0.32 kg / 0.42 kg |
| Inercja: Bez hamulca / Z hamulcem | 73 g·cm² / 116.2 g·cm² |
Instrukcje
Szczegóły

Zaprojketowane do kompaktowych stawów robotycznych, gdzie niska waga i wysoka gęstość momentu obrotowego mają największe znaczenie.

Modularny układ wewnętrzny łączy silnik, reduktor, płytę sterującą i enkoder w jednym zintegrowanym module stawowym.

Zbudowane na skalowalnej platformie produkcyjnej z narzędziami deweloperskimi mającymi na celu przyspieszenie integracji robotów.

Rozbicie na poziomie komponentów pomaga potwierdzić, co jest zawarte w module stawowym w celu planowania projektowania i konserwacji.
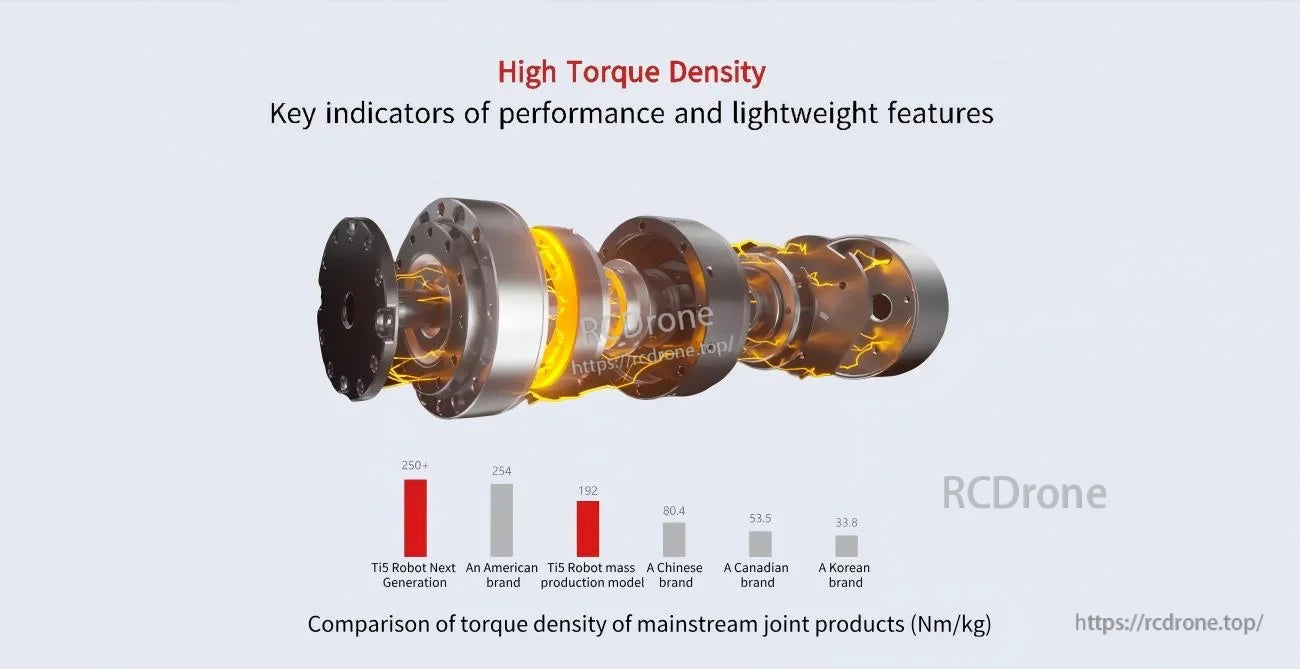
Porównanie gęstości momentu obrotowego (Nm/kg) zapewnia szybki kontekst w porównaniu do innych popularnych produktów stawowych.
Related Collections






