



Robot Ti5 CRA-RI40-52-PRO-XX Zintegrowany przegubowy siłownik robota, napęd harmoniczny, 7 N·m, 24–48 V, CAN/EtherCAT, IP65, wał drążony, pojedynczy/podwójny enkoder (opcja hamulca)
Robot Ti5 CRA-RI40-52-PRO-XX Zintegrowany przegubowy siłownik robota, napęd harmoniczny, 7 N·m, 24–48 V, CAN/EtherCAT, IP65, wał drążony, pojedynczy/podwójny enkoder (opcja hamulca)
Ti5 Robot
Nie można załadować gotowości do odbioru
Przegląd
Robot Ti5 CRA-RI40-52-PRO-XX to kompaktowy, zintegrowany moduł łączący bezramkowy silnik momentowy, precyzyjny reduktor harmonicznych, serwonapęd i enkoder magnetyczny w jednym urządzeniu o stopniu ochrony IP65. Dzięki zasilaniu prądem stałym 24–48 V i mocy znamionowej 90 W, zapewnia moment obrotowy znamionowy 7 N·m i znamionową prędkość wyjściową 80 obr./min, co jest przydatne w robotach humanoidalnych, egzoszkieletach, ramionach współpracujących, gimbalach, pojazdach AGV i innych zaawansowanych zastosowaniach. Centralny otwór przelotowy umożliwia prowadzenie kabli; dostępne są konfiguracje z pojedynczym lub podwójnym enkoderem oraz opcja hamulca postojowego. Komunikacja odbywa się domyślnie przez CAN, z możliwością wyboru EtherCAT.
Główne cechy
-
Zintegrowany silnik + napęd + reduktor harmonicznych + enkoder (magnetyczny)
-
Moment znamionowy 7 N·m; znamionowa prędkość wyjściowa 80 obr./min; moc 90 W
-
Dwa współczynniki redukcji: 51:1 lub 101:1
-
Wysoka precyzja: 17-bitowy enkoder, typowy luz 40 sekund łuku (51)/30 sekund łuku (101)
-
Niski poziom hałasu, niskie zazębianie, konstrukcja o wysokiej gęstości momentu obrotowego
-
Ochrona IP65; opcjonalnie niska temperatura &wzmacniacz; wodoodporna personalizacja
-
Magistrala komunikacyjna: CAN (standard) lub EtherCAT (opcjonalnie)
-
Opcje pojedynczego/podwójnego enkodera; wersje z hamulcem lub bez hamulca
-
Otwór przelotowy na okablowanie: 12 mm (standard)/11 mm (hamulec)
-
Typowe zastosowania: humanoidy, stawy robotów współpracujących, egzoszkielety, podnośniki obrotowe, urządzenia przemysłowe, roboty do inspekcji zasilania, systemy morskie/pojazdowe
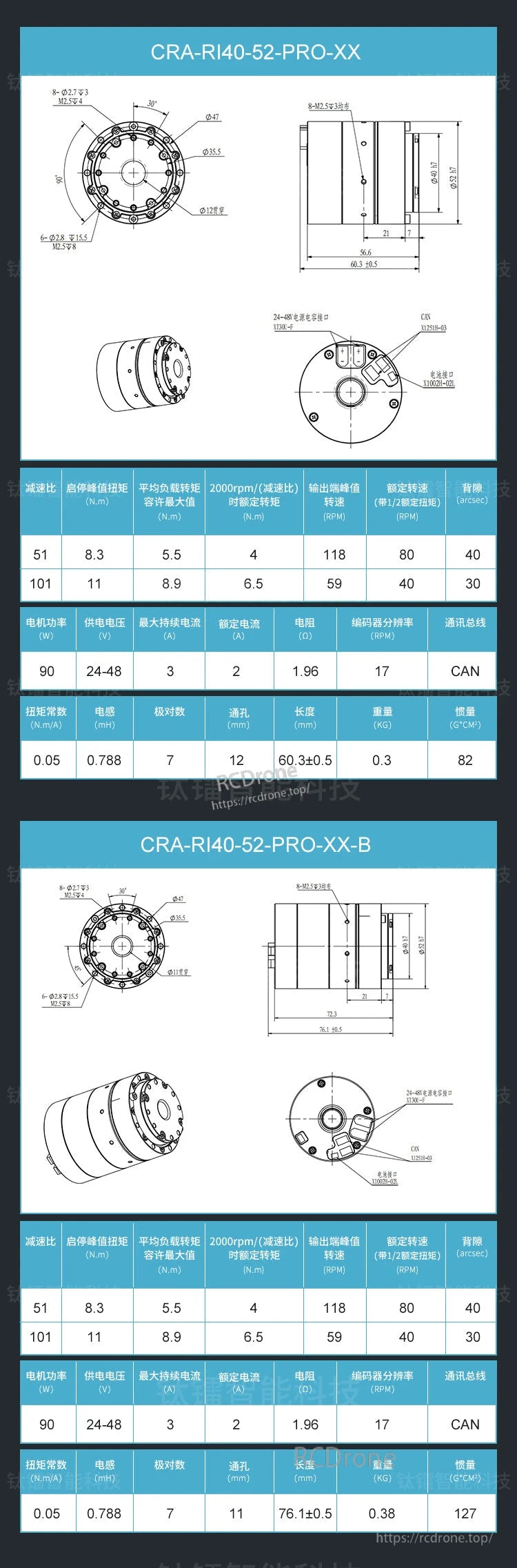
Wydajność według przełożenia
| Przedmiot | 51:1 | 101:1 |
|---|---|---|
| Moment szczytowy start/stop (N·m) | 8.3 | 11 |
| Maksymalny dopuszczalny średni moment obciążenia (N·m) | 5.5 | 8.9 |
| Moment znamionowy przy 2000 obr./min/(stosunek) (N·m) | 4 | 6,5 |
| Maksymalna prędkość wyjściowa (obr./min) | 118 | 59 |
| Prędkość znamionowa przy ½ momentu znamionowego (obr./min) | 80 | 80 |
| Luz (sekundy łuku) | 40 | 30 |
Specyfikacje elektryczne
-
Napięcie zasilania: 24–48 V prądu stałego
-
Prąd znamionowy/ciągły: 2 A (maksymalny ciągły prąd 3 A)
-
Rezystancja fazowa: 1,96 Ω
-
Indukcyjność: 0,788 mH
-
Stała momentu obrotowego: 0,05 N·m/A
-
Pary biegunów: 7
-
Rozdzielczość enkodera: 17-bit (magnetyczny)
Mechaniczny &Interfejs wzmacniacza
-
Stopień ochrony: IP65
-
Znamionowa prędkość wyjściowa: 80 obr./min
-
Komunikacja: MÓC (domyślny)/EtherCAT (opcja)
-
Otwór przelotowy (do okablowania): Ø12 mm (standardowy)/Ø11 mm (z hamulcem)
-
Długość & bezwładność (bez hamulca): 60,3 ± 0,5 mm, 82 g·cm²
-
Długość &wzmacniacz bezwładności (wersja hamulca -B): 76,1 ± 0,5 mm, 127 g·cm²
-
Masa: 0.3 kg
-
Długość kabla: 5 metrów
-
Środowisko pracy (typowe): do 60 °C
-
Materiały: komponenty aluminiowe z precyzyjnym reduktorem harmonicznych
Warianty &Opcje wzmacniacza
-
Komunikacja: CAN lub EtherCAT
-
Koder: pojedynczy lub podwójny enkoder magnetyczny
-
Hamulec: bez hamulca (standard) lub -B wersja z hamulcem postojowym
-
Środowisko: konfigurowalny pakiet hydroizolacji i niskiej temperatury
-
Oznaczenia szeregowe: CRA-PIXX-XX-(PRO)-XX-(B, T, 2E, IPXX) (oznacza reduktor, liczbę czujników/enkoderów momentu obrotowego, stosunek, zabezpieczenie itp.)
Typowe zastosowania
Stawy humanoidalne (ramię/łokieć/biodro/kolano), ramiona robotów współpracujących, siłowniki egzoszkieletów, stabilizatory z funkcją obrotu i pochylenia/wizji, osie automatyki przemysłowej, pojazdy UGV/AGV do kontroli mocy oraz mechanizmy pomocnicze pojazdów morskich/morskich.
Notatki
-
Montaż należy wykonać, stosując określone wzory i tolerancje śrub przedstawione na rysunkach.
-
Przed złożeniem zamówienia należy sprawdzić wymagania dotyczące współczynnika, konfiguracji enkodera, magistrali komunikacyjnej i hamulca.
-
Ze względu na przemysłowy charakter tego produktu, zainstalowane/używane egzemplarze zazwyczaj nie podlegają zwrotowi; przed zakupem należy skonsultować się z personelem technicznym w sprawie dokumentacji dotyczącej rozmiarów.
Bliższe dane
Siłownik przegubowy robota Ti5 CRA-R140-52-PRO-XX i -B oferuje moc 90 W, zasilanie 24–48 V, maksymalny prąd 3 A, rozdzielczość enkodera 17 obr./min, moment obrotowy, prędkość i komunikację CAN.

Siłownik przegubowy robota Ti5 model CRA-PIXX-XX-(PRO)-XX-(B, T, 2E, IPXX) obejmuje hamulec, czujnik momentu obrotowego, dwa enkodery, klasę wodoodporności, przełożenie redukcyjne, średnicę zewnętrzną i typ silnika.

Siłowniki przegubowe serii PRO do robotów humanoidalnych, egzoszkieletów, robotów współpracujących, samochodów i pojazdów AGV. Cechy: wysoka wytrzymałość, długa żywotność, wysoka gęstość momentu obrotowego, niski moment obrotowy, wodoodporność, pyłoszczelność, przeciwwybuchowość, niski poziom hałasu, wysoka precyzja, konstrukcja z wałem drążonym.
Related Collections



