










Ti5 ROBOT CRA-RI60-70-PRO Silnik 300W 24-48V Moduł Przegubu (51/81/101/121) Enkoder 16Bit
Ti5 ROBOT CRA-RI60-70-PRO Silnik 300W 24-48V Moduł Przegubu (51/81/101/121) Enkoder 16Bit
Ti5 ROBOT
Nie można załadować gotowości do odbioru
Przegląd
Silnik Ti5 ROBOT CRA-RI60-70-PRO to lekki moduł stawowy zaprojektowany do kompaktowych stawów robotycznych, gdzie wymagane są wysoka gęstość momentu obrotowego i precyzyjna informacja zwrotna. Integruje kluczowe komponenty stawowe, takie jak enkoder, płyta kontrolna, wirnik/silnik oraz reduktory harmoniczne w modułowej strukturze.
Kluczowe cechy
- Lekki, kompaktowy moduł stawowy: Mały rozmiar zaprojektowany dla stawów robotycznych o ograniczonej przestrzeni.
- Ultra-lekki koncept: Zgłoszona redukcja wagi o ponad 1/3, co pomaga zmniejszyć zużycie energii podczas pracy.
- Silniejsza wydajność (zgłoszona): Standardy wydajności przemysłowej; zgłoszona gęstość momentu obrotowego jest dwukrotnie wyższa niż w podobnych produktach.
- Modularyzacja: Sześć modułów opisano jako interoperacyjne; trzy serie opisano jako dostosowujące się do różnych scenariuszy, wspierające poprawę efektywności produkcji.
- Zintegrowana struktura stawów: Pokrywa tylna silnika, płyta kontrolna, enkoder, obudowa statora, wirnik silnika, stator silnika, reduktory harmoniczne i pokrywa flexspline.
- Zaleta masowej produkcji (podana): Podstawowy sprzęt opisany jako kontrolowalny; opisano kompletny zestaw narzędzi programowych do rozwoju robotów i przyspieszenia R &D.
- Grafika porównawcza gęstości momentu obrotowego: Tytuł wykresu pokazany jako „Porównanie gęstości momentu obrotowego produktów stawowych mainstreamowych (Nm/kg)” z wartościami pokazanymi: 250+ (Ti5 Robot Nowej Generacji), 254 (Amerykańska marka), 192 (Model masowej produkcji Ti5 Robot), 80.4 (Chińska marka), 53.5 (Kanadyjska marka), 33.8 (Koreańska marka).
W przypadku pytań dotyczących wsparcia w zakresie wyboru i integracji, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/ .
Aplikacje
- Roboty humanoidalne
- Ramiona robotyczne
- Egzoszkielety
- Roboty czworonożne
- Pojazdy AGV
- Roboty ARU
Specyfikacje
| Parametr | Wartość |
|---|---|
| Model silnika | CRA-RI60-70-PRO-XX / CRA-RI60-70-PRO-XX-B |
| Stosunek redukcji | 51 / 81 / 101 / 121 |
| Moment obrotowy szczytowy przy rozruchu i zatrzymaniu | 42 / 53 / 66 / 66 N.m |
| Maksymalny dopuszczalny średni moment obrotowy | 32 / 33 / 49 / 49 N.m |
| 2000 Rpm/(Stosunek redukcji) Moment obrotowy nominalny przy tej prędkości | 19.8 / 27.5 / 30 / 30 N.m |
| Wyjściowa maksymalna prędkość obrotowa | 82 / 51 / 41 / 32 RPM |
| Prędkość nominalna | 68 / 43 / 34 / 24 RPM |
| Moc silnika | 300 W |
| Napięcie zasilania | 24-48 V |
| Maksymalne ciągłe natężenie | 6.7 A |
| Natężenie nominalne | 5 A |
| Rozdzielczość enkodera | 16Bit |
| Prześwit z tyłu | 20 / 20 / 10 / 10 arcsec |
| Stała momentu | 0.096 N.m/A |
| Otwór | 18 mm |
| Długość: Bez hamulca / Z hamulcem | 72.5±0.5 mm / 93±0.5 mm |
| Waga: Bez hamulca / Z hamulcem | 0.73 kg / 0.88 kg |
| Inercja: Bez hamulca / Z hamulcem | 394,8 g·cm² / 492 g·cm² |
Instrukcje
Szczegóły

Kompaktowa, lekka platforma modułowa dla stawów robotycznych w ograniczonej przestrzeni, które nadal potrzebują wysokiej gęstości momentu obrotowego i precyzyjnego sprzężenia zwrotnego.

Zintegrowany projekt stawu łączy silnik, enkoder i elektronikę napędową w modułową strukturę, aby uprościć integrację stawu.


Podstawowe komponenty stawu — płytka kontrolna, enkoder, wirnik/stator silnika oraz reduktor harmoniczny — są zintegrowane w jeden gotowy do użycia zespół stawu.
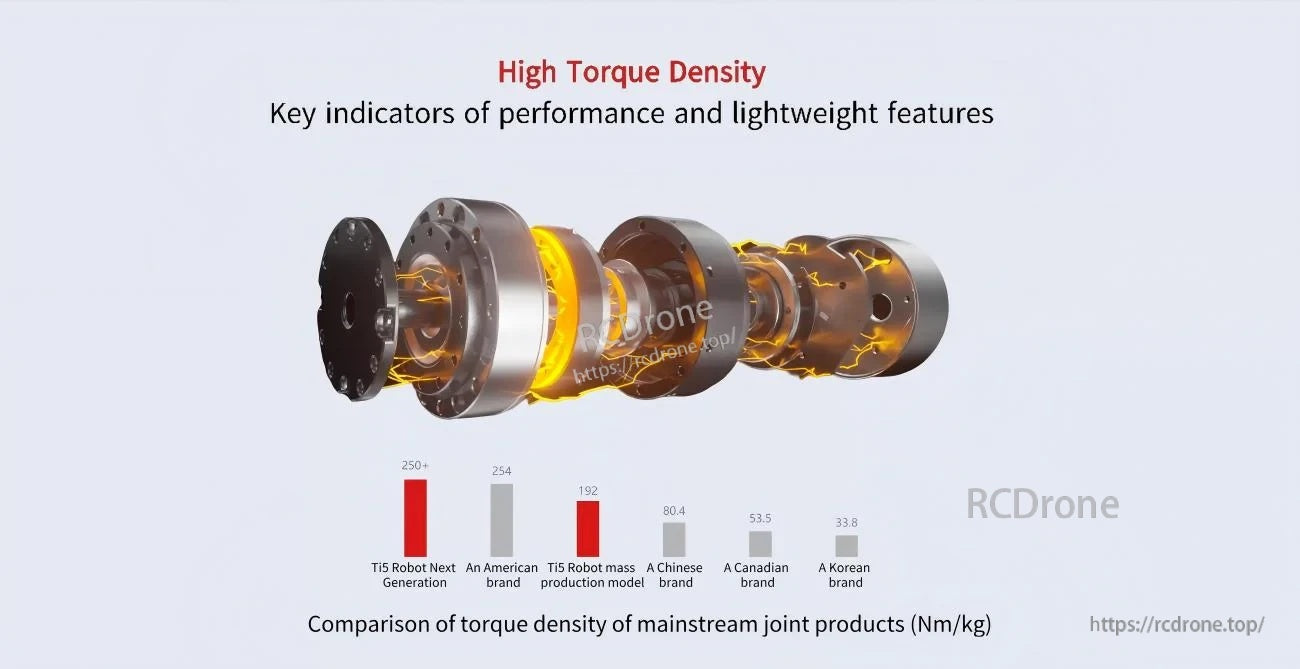
Porównanie gęstości momentu obrotowego (Nm/kg) pomaga w ocenie wydajności modułów stawowych w różnych modelach robota Ti5 oraz innych popularnych produktach.
Related Collections










