


Siłownik Ti5 Robot CRA-RI60-70-PRO-S-XX z wałem drążonym, 24–48 V CAN/EtherCAT, IP65, 51–102:1, moment szczytowy do 66 N·m, opcja hamulca -B
Siłownik Ti5 Robot CRA-RI60-70-PRO-S-XX z wałem drążonym, 24–48 V CAN/EtherCAT, IP65, 51–102:1, moment szczytowy do 66 N·m, opcja hamulca -B
Ti5 Robot
Nie można załadować gotowości do odbioru
Przegląd
Ten Robot Ti5 CRA-RI60-70-PRO-S-XX to kompaktowy, zintegrowany przegub robota z wałem drążonym, przeznaczony do ramion, humanoidów, egzoszkieletów, mechanizmów bezzałogowych statków powietrznych (UAV) i platform mobilnych. Łączy on bezramkowy silnik momentu obrotowego BLDC, precyzyjny reduktor, magnetyczny enkoder absolutny (pojedynczy lub podwójny) oraz interfejs napędowy w jednym module IP65. Architektura PRO-S stawia na miniaturyzację i szybką reakcję dynamiczną, zachowując jednocześnie wysoki stosunek obciążenia do masy. Komunikacja odbywa się domyślnie przez magistralę CAN, z dostępnym interfejsem EtherCAT. Wersja hamulca fabrycznego „-B” posiada dodatkowy hamulec postojowy zapewniający bezpieczeństwo po wyłączeniu zasilania. (Wszystkie poniższe wartości pochodzą z dołączonych kart katalogowych i zrzutów ekranu produktów).
Główne cechy
-
Kompaktowy moduł przegubowy z wałem pustym (seria Ø60/Ø70) do łatwego prowadzenia kabli i pneumatyki
-
Przełożenia 51, 81, 101, 102 z niskim luzem (do 10 sekund kątowych w zależności od przełożenia)
-
Maksymalny moment obrotowy do 66 N·m; moment znamionowy do 30 N·m (przy 2000 obr./min/stosunek obrotów)
-
Szybka reakcja; konstrukcja o dużym stosunku obciążenia do masy (≈0,69 kg standardowo/≈0,84 kg z hamulcem)
-
Obudowa pyłoszczelna i wodoodporna IP65, konstrukcja aluminiowa
-
Magnetyczny enkoder absolutny, 17-bitowy; opcje pojedynczego lub podwójnego enkodera
-
Zasilanie 24–48 V DC, magistrala CAN (opcjonalnie EtherCAT); średnica wału przelotowego 18 mm
-
Wariant „-B” dodaje hamulec postojowy, dłuższe nadwozie i większą bezwładność do trzymania
Specyfikacje
Typowe urządzenia elektryczne &wzmacniacz mechaniczny
-
Moc silnika: 300 W
-
Napięcie zasilania: 24–48 V DC
-
Maksymalny prąd ciągły: 6,7 A; Prąd znamionowy: 5 A; Rezystancja fazy: 0,33 Ω
-
Stała momentu obrotowego: 0,096 N·m/A; Indukcyjność: 0,074 mH; Liczba par biegunów: 10
-
Enkoder: magnetyczny absolutny, 17-bitowy; wybieralny pojedynczy/podwójny
-
Komunikacja: CAN (opcjonalnie EtherCAT)
-
Otwór przelotowy: 18 mm; Stopień ochrony: IP65
Na przełożenie (CRA-RI60-70-PRO-S-XX)
| Stosunek | Maksymalny moment obrotowy start/stop (N·m) | Maksymalny ciągły/średni moment obrotowy (N·m) | Moment znamionowy przy 2000 obr./min/stosunek (N·m) | Maksymalna prędkość wyjściowa (obr./min) | Prędkość znamionowa przy ½ momentu znamionowego (obr./min) | Luz (sekundy łuku) |
|---|---|---|---|---|---|---|
| 51 | 42 | 32 | 19,8 | 82 | 68 | 20 |
| 81 | 53 | 33 | 27,5 | 51 | 43 | 20 |
| 101 | 66 | 49 | 30 | 41 | 34 | 10 |
| 102 | 66 | 49 | 30 | 32 | 24 | 10 |
Współczynnik kształtu &wzmacniacz bezwładności
-
Standardowa (-XX): długość 70,7 ± 0,5 mm; waga 0,69 kg; bezwładność wirnika 382 g·cm²
-
Z hamulcem (-XX-B): długość 89,7 ± 0,5 mm; waga 0.84 kg; bezwładność wirnika 538 g·cm²
Inne dane katalogowe
-
Wartość nominalna momentu obrotowego: 30 N·m
-
Typowa prędkość znamionowa: 30 obr./min (zależna od przełożenia)
-
Temperatura pracy: do 60 °C
-
Montaż: montaż śrubowy; wałek z wpustem
Uwagi: pojedynczy/podwójny enkoder, opcja hamulca i typ magistrali są dostępne przy składaniu zamówienia; EtherCAT jest oznaczony jako „Ether-cat” na zrzutach ekranu. Wszystkie powyższe wymiary i parametry pochodzą bezpośrednio z dostarczonych arkuszy dla CRA-RI60-70-PRO-S-XX i CRA-RI60-70-PRO-S-XX-B.
Aplikacje
-
6-osiowe ramiona robotyczne współpracujące i przemysłowe
-
Stawy humanoidalne (ramię, łokieć, biodro, kolano)
-
Egzoszkielety i urządzenia rehabilitacyjne
-
Mechanizmy/gimbale i manipulatory świetlne UAV
-
Mechanizmy AGV/AMR, małe obrabiarki i automatyka laboratoryjna
Bliższe dane
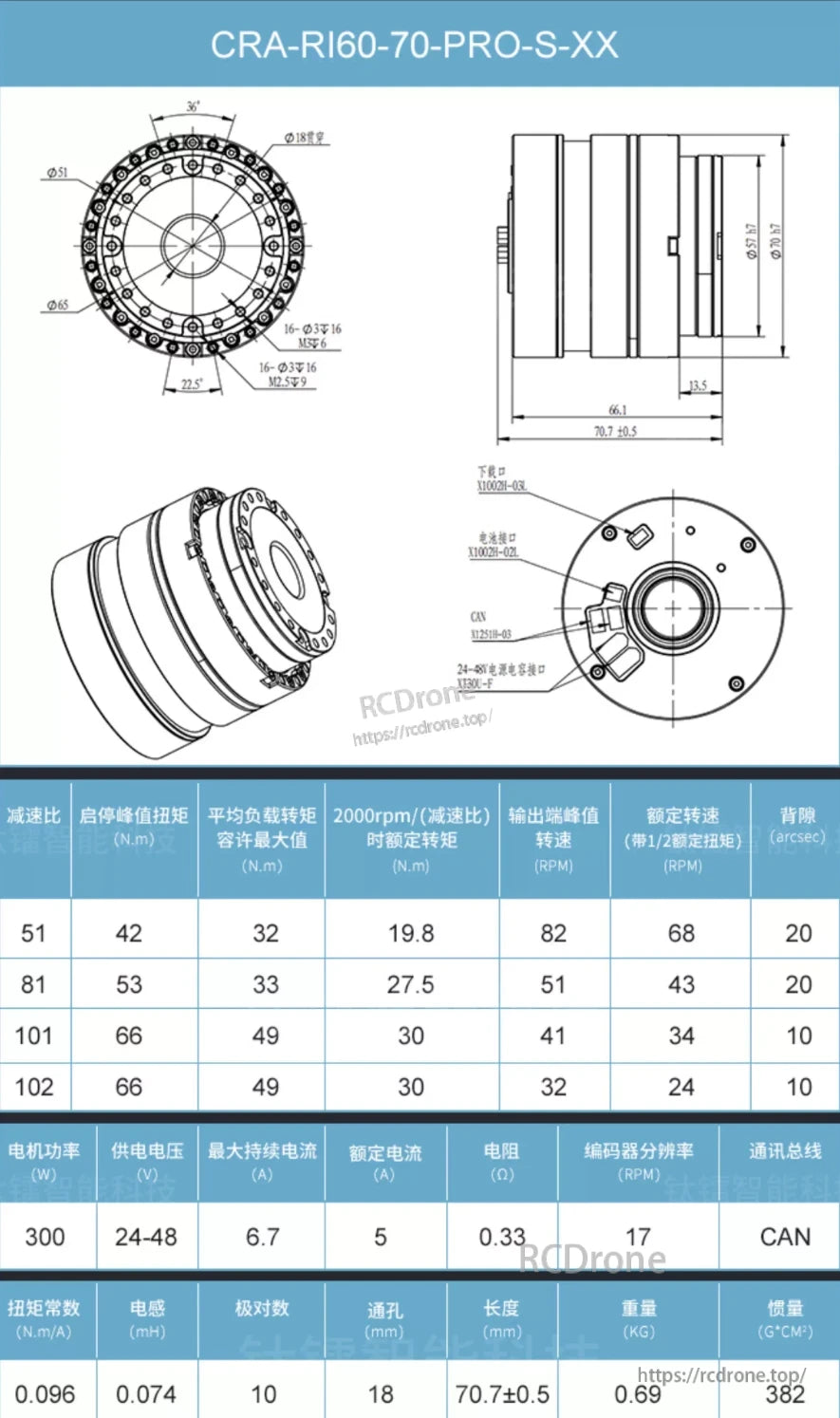
Dane techniczne siłownika CRA-RI60-70-PRO-S-XX: silnik 300 W, prąd znamionowy 24-48 V, 5 A, rozdzielczość enkodera 17 obr./min, komunikacja CAN, waga 0,69 kg, moment bezwładności 382 G·CM², wiele przełożeń z danymi dotyczącymi momentu obrotowego i prędkości.

Specyfikacja siłownika CRA-RI60-70-PRO-S-XX-B: silnik 300 W, napięcie 24-48 V, prąd znamionowy 5 A, rezystancja 0,33 Ω, rozdzielczość enkodera 17 obr./min, magistrala CAN, masa 0,84 kg, moment bezwładności 538 G·cm². Wymiary: długość 89,7 ± 0,5 mm, Ø70,37 mm.
Related Collections


