Zintegrowany moduł złącza robota Ti5 CRA-RI60-80-PRO-XX — napęd harmoniczny, 24–48 V, CAN/EtherCAT, 17-bitowy enkoder
Zintegrowany moduł złącza robota Ti5 CRA-RI60-80-PRO-XX — napęd harmoniczny, 24–48 V, CAN/EtherCAT, 17-bitowy enkoder
Ti5 Robot
Nie można załadować gotowości do odbioru
Przegląd
Robot Ti5 CRA-RI60-80-PRO-XX to kompaktowy, zintegrowany przegub z wałem pustym do robotów humanoidalnych, robotów współpracujących i manipulatorów mobilnych. Łączy w sobie ultracienki reduktor harmonicznych, silnik bezramkowy z momentem obrotowym, Serwonapęd FOC, I absolutny enkoder magnetyczny w jednym module, dostarczając wyjście o niemal zerowym luzie zwrotnym, niski poziom hałasu i wysoka gęstość momentu obrotowego. Połączenie wspiera MÓC Lub EtherCAT, pojedyncze lub podwójne enkoderyi opcjonalny hamulec postojowyDostępne są dwie długości: standardowa PRO-XX i wydłużona PRO-XX-B (dłuższy korpus, większa bezwładność wirnika, większy otwór przelotowy).
Główne cechy
-
Wszystko w jednym stawie: reduktor harmonicznych + silnik momentu obrotowego + sterownik FOC + enkoder absolutny.
-
Prawie zerowy luz na wyjściu; płynna regulacja przy niskiej prędkości i niski poziom hałasu.
-
Konstrukcja wału pustego do przepustów kablowych/powietrznych; wielokrotne przełożenia redukcyjne.
-
Enkoder absolutny, 17-bitowy, pamięć położenia po zaniku zasilania; opcjonalnie podwójny enkoder wersja.
-
Komunikacja: MÓC Lub EtherCAT do wyboru.
-
Moc: 24–48 V, zintegrowany sterownik, klasa mocy silnika 300 W.
-
Opcjonalny hamulec postojowy; IP/wodoodporność &wzmacniacz; niskotemperaturowy dostępna personalizacja.
-
Gotowy do użycia do gimbali, robotów humanoidalnych, cobotów, sprzętu przemysłowego, robotów patrolowych i urządzeń morskich.
Specyfikacje
Elektryczny & Control (współdzielony przez PRO-XX/PRO-XX-B)
-
Moc znamionowa silnika: 300 W
-
Napięcie zasilania: 24–48 V prądu stałego
-
Maksymalny prąd ciągły: 6,7 A; prąd znamionowy: 5 A
-
Rezystancja fazowa: 0,33 Ω
-
Stała momentu obrotowego: 0,096 N·m/A
-
Indukcyjność: 0,074 mH
-
Pary biegunów: 10
-
Koder: 17-bitowy absolutny; opcje pojedynczego/podwójnego enkodera
-
Autobus: MÓC (standardowy) lub EtherCAT (opcja)
Mechaniczny (wał drążony)
-
Przelotowy (PRO-XX): Ø15 mm
-
Otwór przelotowy (PRO-XX-B): Ø18 mm
-
Długość (PRO-XX): 70,4 ± 0,5 mm; waga ≈1,01 kg; bezwładność wirnika ≈441 g·cm²
-
Długość (PRO-XX-B): 92,9 ± 0,5 mm; waga ≈1,17 kg; bezwładność wirnika ≈595 g·cm²
-
Montaż: przedni okrąg śrubowy (wyjście puste); zintegrowany reduktor harmonicznych
-
Opcje: hamulec postojowy; pojedynczy/podwójny enkoder; CAN/EtherCAT; wodoodporność &wzmacniacz; pakiet niskotemperaturowy
Opcje reduktora &wydajność wzmacniacza (strona wyjściowa)
Reakcja: tak niska jak 10–20 sekund łuku w zależności od współczynnika.
| Współczynnik redukcji | Moment szczytowy start/stop (N·m) | Maksymalny średni moment obciążenia (N·m) | Moment znamionowy przy 2000 obr./min/stosunek (N·m) | Prędkość maksymalna (obr./min) | Prędkość znamionowa przy ½ momentu znamionowego (obr./min) | Luz (sekundy łuku) |
|---|---|---|---|---|---|---|
| 51:1 | 42 | 32 | 19,8 | 82 | 68 | 20 |
| 81:1 | 53 | 33 | 27,5 | 51 | 43 | 20 |
| 101:1 | 66 | 49 | 30 | 41 | 34 | 10 |
| 121:1 | 66 | 49 | 30 | 32 | 24 | 10 |
Uwagi:
• Powyższe dane zostały odczytane z kart produktów CRA-RI60-80-PRO-XX i PRO-XX-B.
• PRO-XX-B ma taką samą tabelę momentu obrotowego/prędkości, większy otwór przelotowy i większą bezwładność przy dłuższym korpusie.
Aplikacje
-
Humanoidalny &i roboty usługowe: stawy barkowe, łokciowe, biodrowe, kolanowe, skokowe o dużej gęstości momentu obrotowego.
-
Współpracujące ramiona robota:precyzyjne osie o małym luzie zapewniające płynną kontrolę siły.
-
Zawieszenie kardanowe &wzmacniacz; jednostki pan-tilt:ciche, stabilne śledzenie przy niskiej prędkości z pamięcią położenia absolutnego.
-
Sprzęt przemysłowy &manipulatory AGV/AMR: kompaktowy, zintegrowany siłownik do ciasnych przestrzeni.
-
Roboty patrolowe i inspekcyjne; urządzenia morskie/okrętowe (z opcją wodoodporności).
Bliższe dane
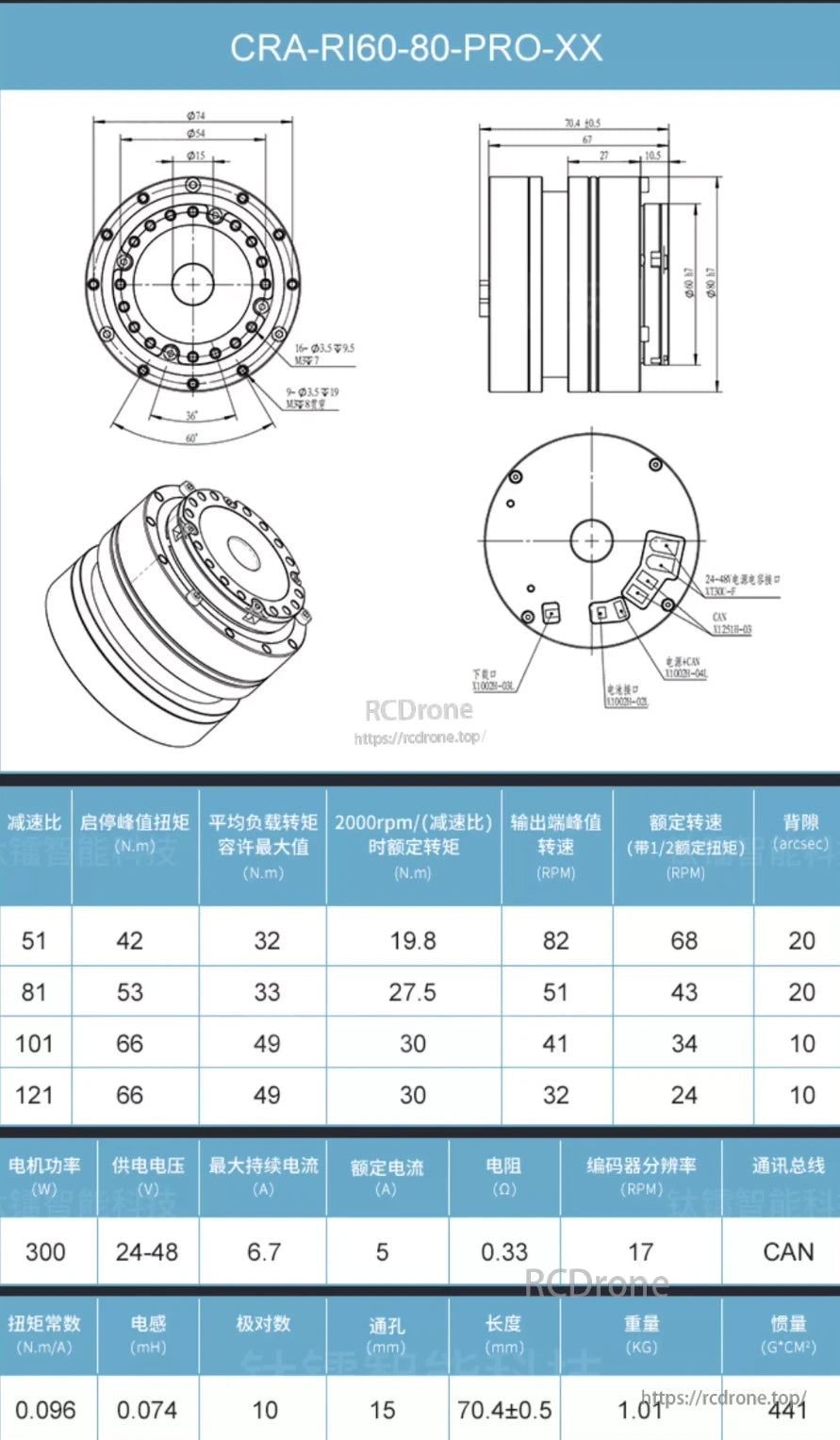
Specyfikacja modułu przegubowego robota CRA-RI60-80-PRO-XX: silnik 300 W, wejście 24–48 V, magistrala CAN, enkoder 17 CPR, długość 70,4 mm, waga 1,01 kg, wiele przełożeń z danymi dotyczącymi momentu obrotowego i prędkości.
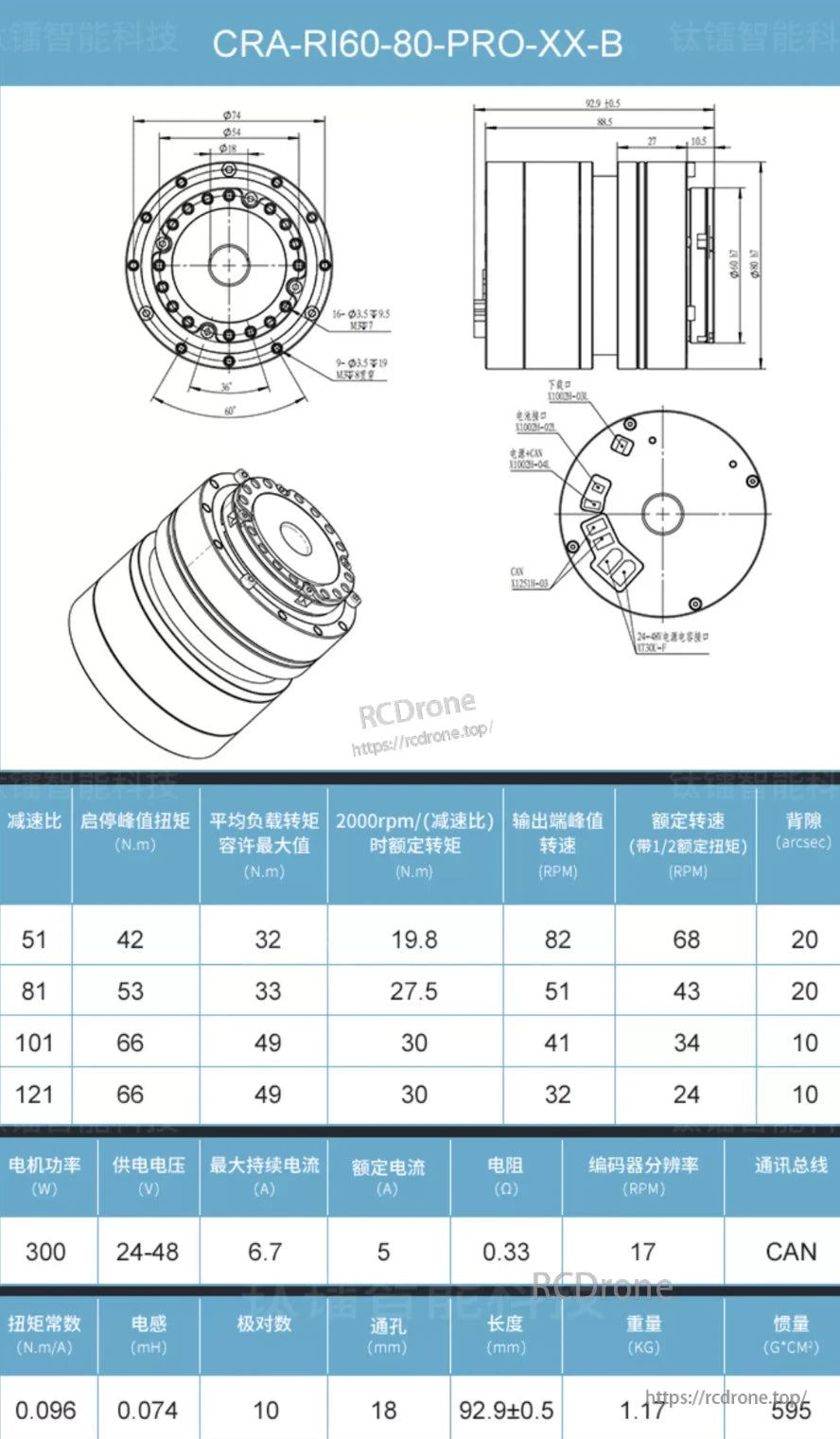
Moduł przegubu robota CRA-RI60-80-PRO-XX-B z silnikiem 300 W, zasilaniem 24-48 V, komunikacją CAN, rozdzielczością enkodera 17 obr./min i wieloma przełożeniami. Kluczowe parametry obejmują moment obrotowy, prędkość, natężenie prądu i wymiary.
Related Collections