Robot Ti5 CRA-RI70-90-PRO-XX Harmoniczne złącze serwo, 500 W, 24–48 V, 17-bit, CAN/EtherCAT, 51–121:1, IP65 (opcja z hamulcem)
Robot Ti5 CRA-RI70-90-PRO-XX Harmoniczne złącze serwo, 500 W, 24–48 V, 17-bit, CAN/EtherCAT, 51–121:1, IP65 (opcja z hamulcem)
Ti5 Robot
Nie można załadować gotowości do odbioru
Przegląd
Robot Ti5 CRA-RI70-90-PRO-XX to zintegrowany moduł przegubu robotycznego, który łączy ultracienki reduktor harmonicznych, bezszczotkowy silnik momentu obrotowego, serwonapęd FOC i enkoder absolutny w kompaktowej konstrukcji z wałem pustym. O mocy znamionowej 500 W, dostarczać 24–48 Vi współczynniki redukcji 51/81/101/121:1Zapewnia wysoki moment obrotowy z niemal zerowym luzem i precyzyjnym pozycjonowaniem dla robotów humanoidalnych, cobotów, gimbali, platform mobilnych i egzoszkieletów. 17-bitowy enkoder absolutny zapewnia precyzyjne sterowanie serwomechanizmami, a komunikacja CAN lub EtherCAT upraszcza integrację systemu. Moduł jest… IP65 zapieczętowane i dostępne z hamulcem lub bez (wariant -B).
Główne cechy
-
Zintegrowany przegub serwo harmoniczny:reduktor + silnik momentu obrotowego BLDC + 17-bitowy enkoder absolutny + sterownik FOC.
-
Wysoki moment obrotowy &wzmacniacz; niski luz: aż do Moment obrotowy znamionowy 50 N·m (zależne od stosunku) z ≤20/10 sekund łuku reakcja.
-
Wiele współczynników: 51/81/101/121:1 aby zrównoważyć prędkość i moment obrotowy.
-
Szeroka podaż &wzmacniacz; moc: 24–48 V, 500 W, przeznaczony do robotów 24/36/48 V.
-
Wał pusty Ø14,5 mm do prowadzenia linii kablowych/napowietrznych; 10 par biegunów silnik.
-
Komunikacja: MÓC Lub EtherCAT; opcje pojedynczego lub podwójnego enkodera.
-
Ochrona: IP65 uszczelnienie środowiskowe.
-
Opcja hamulca: CRA-RI70-90-PRO-XX-B zawiera hamulec postojowy zapewniający bezpieczne wyłączenie zasilania.
Specyfikacje
Rodzina modelowa: CRA-RI70-90-PRO-XX (standard)/CRA-RI70-90-PRO-XX-B (z hamulcem)
| Przedmiot | Wartość |
|---|---|
| Współczynniki redukcji | 51/81/101/121 : 1 |
| Moment znamionowy przy 2000 obr./min/stosunek | 32/42/50/50 N·m |
| Moment obrotowy szczytowy rozruchu | 63/91/102/108 Nm |
| Maksymalny dopuszczalny moment obciążenia (średni) | 42/58/61/61 N·m | &
| Prędkość znamionowa (½ znamionowego momentu obrotowego) | 61/38/30/25 obr./min |
| Maksymalna prędkość wyjściowa | 77/48/40/30 obr./min |
| Reakcja | 20 sekund łuku (51,81); 10 sekund kątowych (101,121) |
| Moc silnika | 500 W |
| Napięcie zasilania | 24–48 V prądu stałego |
| Prąd znamionowy/maksymalny ciągły | 6,1 A/8,4 A |
| Rezystancja fazowa/indukcyjność | 0,38 Ω/0,33 mH |
| Stała momentu obrotowego | 0,118 N·m/A |
| Pary biegunów silnika | 10 |
| Koder | 17-bitowy absolutny (dostępny pojedynczy lub podwójny enkoder) |
| Magistrala komunikacyjna | MÓC (EtherCAT dostępny w zależności od opcji) |
| Otwór wału pustego | Ø14,5 mm |
| Długość modułu | 71,9 ± 0,5 mm (standardowy)/97,4 ± 0,5 mm (-B) |
| Masa | 1,3 kg (standardowy)/1,6 kg (-B) |
| Moment bezwładności wirnika (ref.) | 594 g·cm² (standardowy)/682 g·cm² (-B) |
| Ochrona przed wnikaniem | IP65 |
| Montowanie | Montaż kołnierzowy z otworami gwintowanymi |
Notatki
• Wartości wydajności różnią się w zależności od wybranego współczynnika (51/81/101/121).
• „-B” oznacza fabrykę hamulec opcja.
• Pojedynczy/podwójny enkoder i CAN/EtherCAT są opcjami do wyboru.
Aplikacje
-
Roboty humanoidalne i usługowe: stawy biodrowe, kolanowe, barkowe i łokciowe wymagające kompaktowych modułów o wysokim momencie obrotowym.
-
Ramiona współpracujące/manipulatorowe:precyzyjne połączenia o niskim luzie dla cobotów 6-/7-osiowych.
-
Zawieszenie kardanowe &wzmacniacz; jednostki pan-tilt:płynne, precyzyjne pozycjonowanie dzięki prowadzeniu wału drążonego.
-
Roboty mobilne &wzmacniacz; inspekcja: napęd kół/zawieszenia i maszty czujnikowe z hamulcem w pozycji stojącej.
-
Egzoszkielety &urządzenia rehabilitacyjne: lekkie połączenia o dużym momencie obrotowym.
-
Przemysłowe/elektryczne &i sprzęt morski:Wspólna aktywacja IP65 w trudnych warunkach.
Bliższe dane
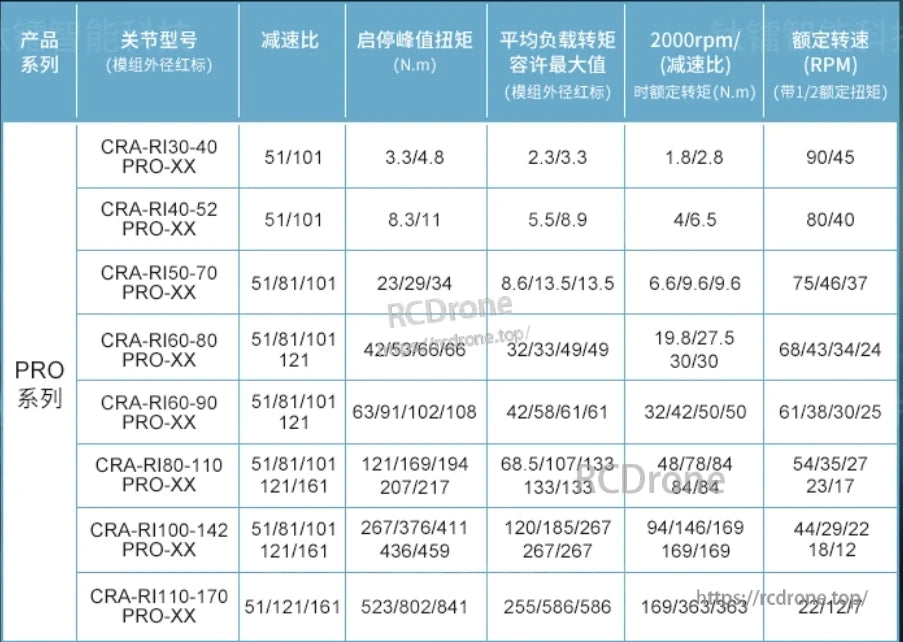
Specyfikacje serii Ti5 Robot CRA Servo Joint PRO obejmują numery modeli, przełożenia, maksymalny moment obrotowy, moment obciążenia, znamionowy moment obrotowy przy 2000 obr./min i znamionowe prędkości w różnych konfiguracjach.
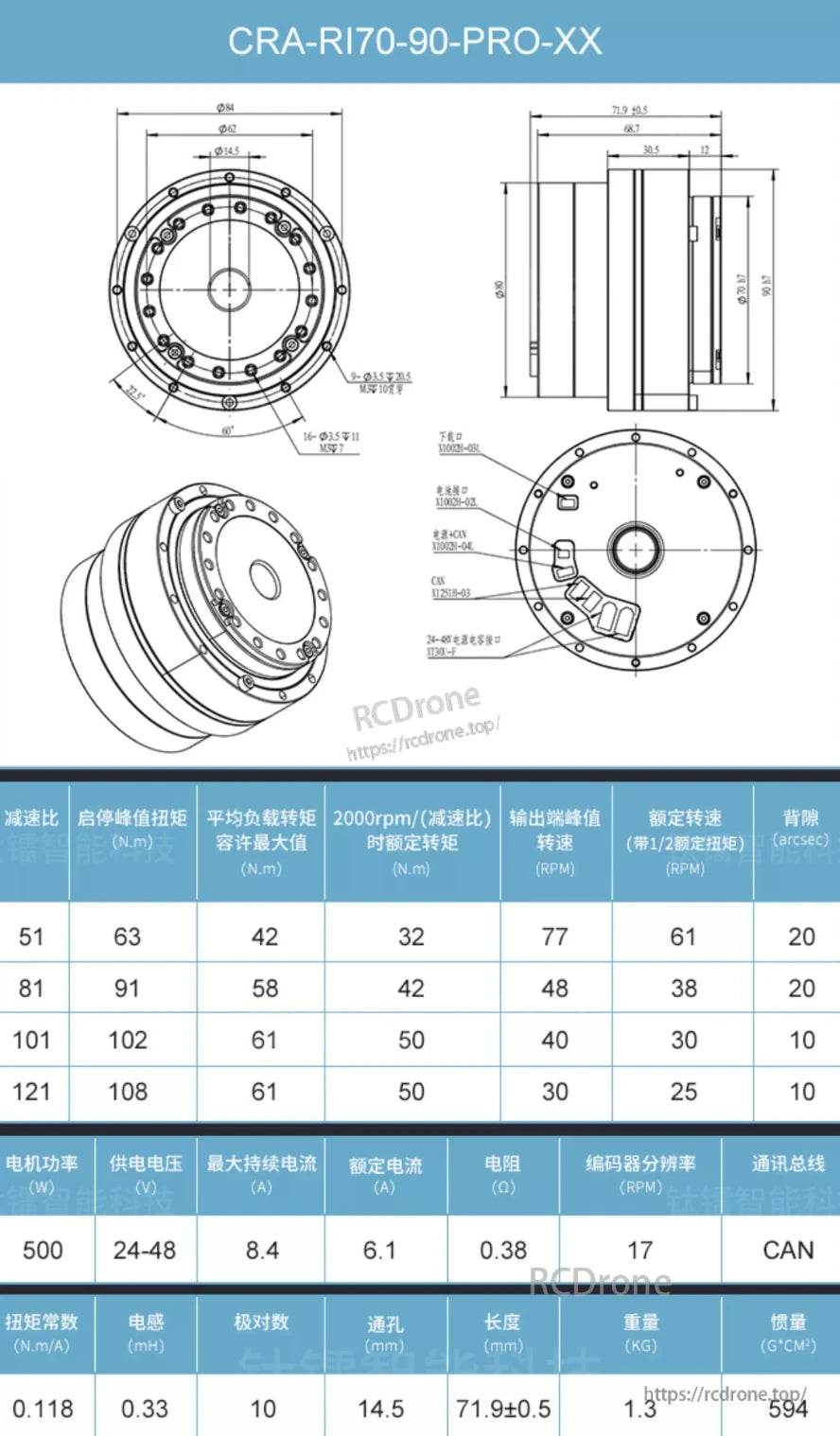
Specyfikacja serwozłącza CRA-RI70-90-PRO-XX: silnik 500 W, 24-48 V, magistrala CAN, rozdzielczość enkodera 17 obr./min, waga 1,3 kg, wiele przełożeń, maksymalny moment obrotowy do 108 N.m, 594 g·cm² bezwładności.
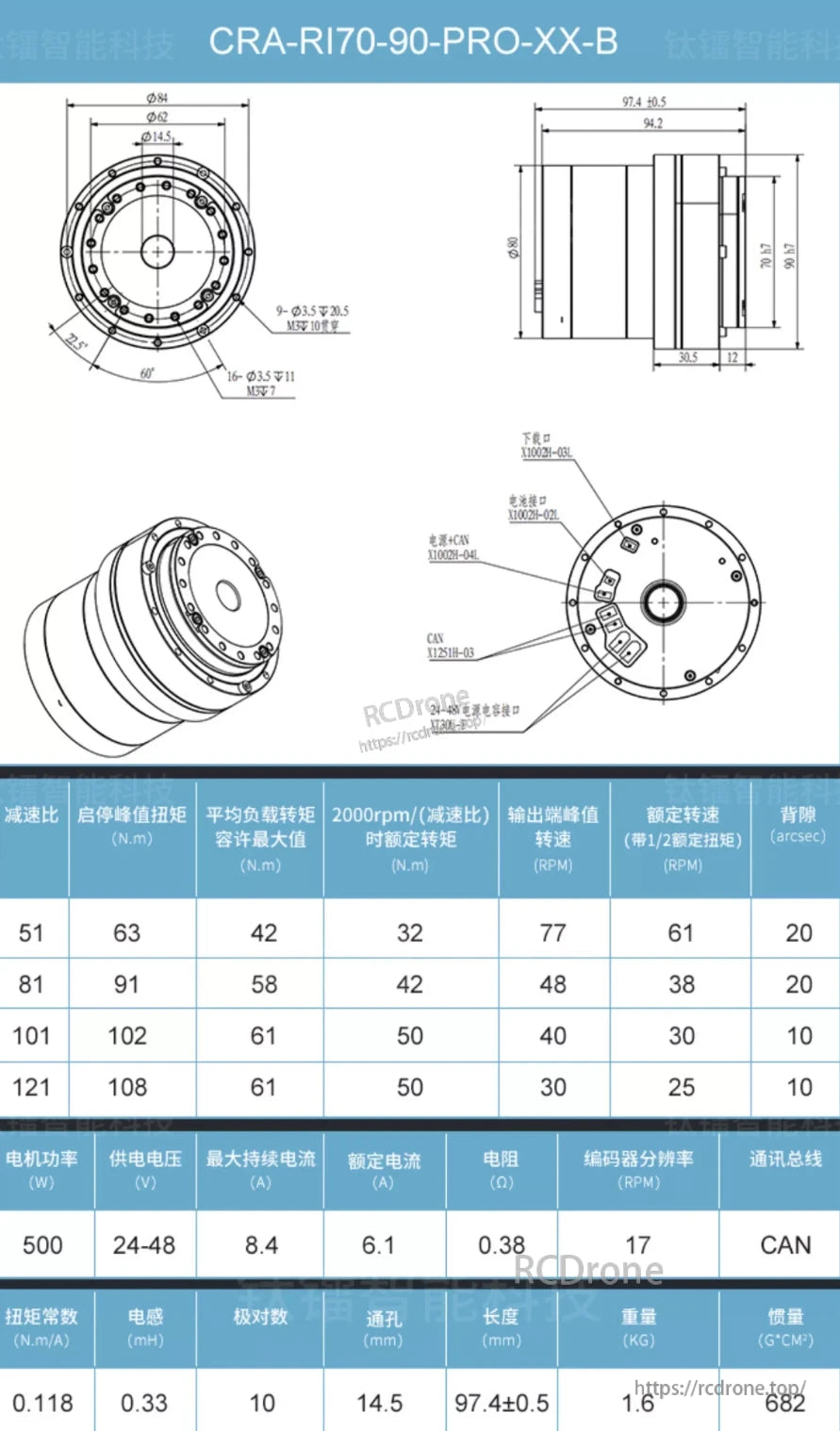
Specyfikacja serwozłącza CRA-R170-90-PRO-XX-B: silnik 500 W, 24-48 V, magistrala CAN, rozdzielczość enkodera 17 obr./min, waga 1,6 kg, wiele przełożeń z danymi dotyczącymi momentu obrotowego i prędkości.
Related Collections