


TLIBOT TSJA20 48 V, 160 W, Reduktor Harmoniczny 50/80/100/120, Enkodery 19-bitowe, Silnik Robota Ethercat/CAN FD
TLIBOT TSJA20 48 V, 160 W, Reduktor Harmoniczny 50/80/100/120, Enkodery 19-bitowe, Silnik Robota Ethercat/CAN FD
TLIBOT
Nie można załadować gotowości do odbioru
Przegląd
TLIBOT TSJA20 to kompaktowy silnik robotyczny zaprojektowany do wysokotorowych stawów robotycznych. Integruje reduktor harmoniczny, podwójne enkodery o wysokiej rozdzielczości oraz elektromagnetyczny hamulec z przekładnią w lekkiej obudowie, co umożliwia precyzyjne sterowanie ruchem i ciągły obrót dla zaawansowanych systemów robotycznych.
Moduł obsługuje przemysłowe magistrale (Ethercat/CAN/CAN FD), oferuje działanie przy 48 V z mocą nominalną 160, a także zapewnia powtarzalne pozycjonowanie na poziomie 1′. Architektura enkodera jest bezbaterii zarówno po stronie wyjściowej, jak i wejściowej, co upraszcza konserwację i integrację.
Kluczowe cechy
- Opcje redukcji harmonicznych: 50 / 80 / 100 / 120
- Zintegrowany elektromagnetyczny hamulec z zazębieniem
- Bezbateryjny enkoder wyjściowy 19-bitowy z pojedynczym obrotem oraz 19-bitowy enkoder wejściowy ST (wielokrotny obrót przez wyjście)
- Wsparcie dla przemysłowych magistrali: Ethercat/CAN/CAN FD
- Struktura złącz IP54 i ciągły obrót 360° (jak pokazano w materiałach produktowych)
- Instalacja osiowa do obudowy robota ilustrowana dla szybkiej integracji
- Lekka konstrukcja o wadze 0.98 Kg
Specyfikacje
| Parametr | Wartość |
|---|---|
| Współczynnik redukcji harmonicznych | 50 / 80 / 100 / 120 |
| Moment nominalny (Nm) | 33 / 43 / 52 / 52 |
| Dozwolony moment szczytowy przy rozruchu i zatrzymaniu (Nm) | 73 / 96 / 107 / 113 |
| Maksymalny dozwolony średni moment obciążenia (Nm) | 44 / 61 / 63 / 63 |
| Natychmiastowy dozwolony maksymalny moment (Nm) | 127 / 165 / 189 / 189 |
| Maksymalna prędkość obrotowa na końcu wyjściowym (RPM) | 60 / 37.5 / 30 / 25 |
| Dokładność powtarzalności pozycjonowania | 1′ |
| Nominalna prędkość silnika (RPM) | 3000 |
| Maksymalna chwilowa prędkość silnika (RPM) | 3500 |
| Nominalna moc silnika | 160 |
| Nominalne napięcie (V) | 48 |
| Waga (Kg) | 0.98 |
| Rozdzielczość enkodera wyjściowego | 19bit pojedynczy obrót abs. (bez baterii) |
| Rozdzielczość enkodera wejściowego | 19bit ST abs.(multi-turn bez akumulatora) |
| Fieldbus | Ethercat/CAN/CAN FD |
| Zintegrowane hamulce | Hamulce elektromagnetyczne z zazębieniem |
Zastosowania
- Roboty humanoidalne
- Ramiona robotów
- Egzoszkielety
- Roboty czworonogie
- Pojazdy AGV
- Roboty ARU
W celu uzyskania wsparcia przed sprzedażą i wsparcia technicznego, skontaktuj się z [email protected] or odwiedź https://rcdrone.top/.
Podręczniki
- Specyfikacja komunikacji szeregowej (PDF)
- KATALOG MODUŁÓW STAWOWYCH ULTRA-LEKKICH (PDF)
- Ilustracja instalacji TSJA45 (PDF)
Szczegóły
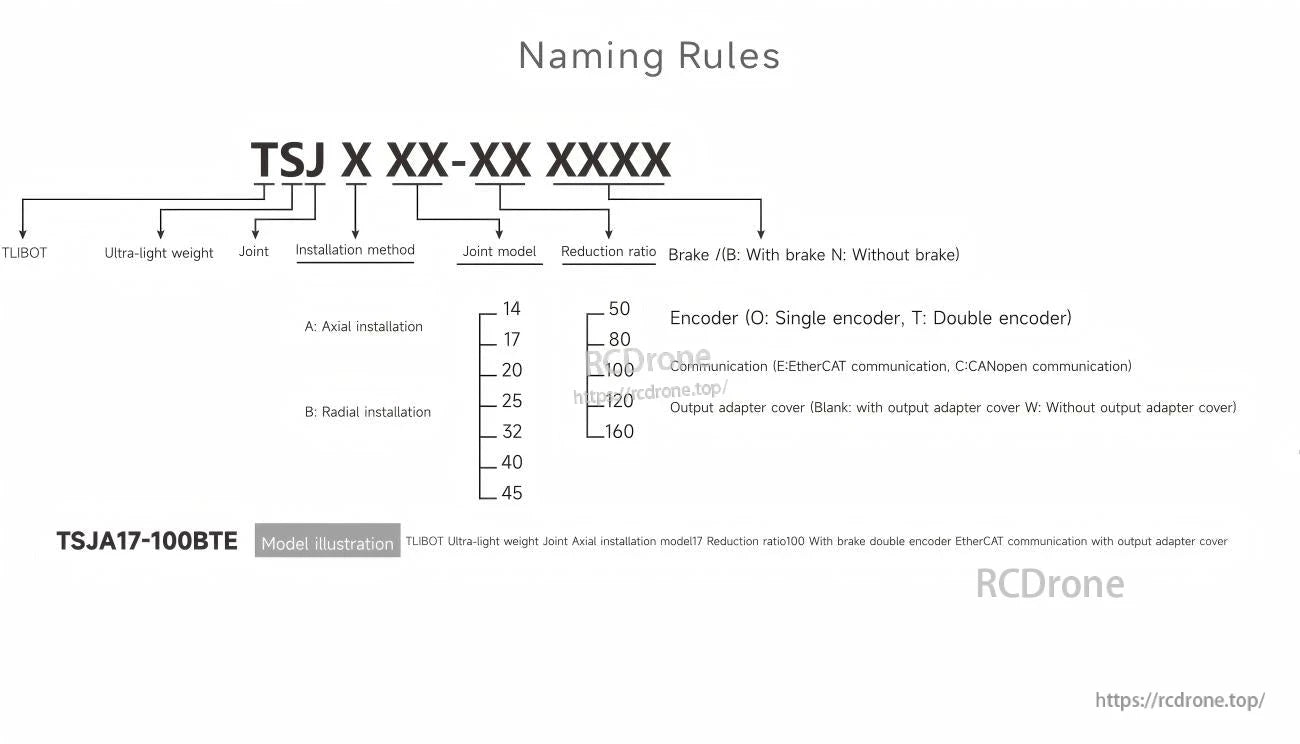
Kody modeli serii TSJ wskazują specyfikacje stawów: instalacja, model, przełożenie, hamulec, enkoder, protokół i adapter.Przykład: TSJA17-100BTE oznacza montaż osiowy, model 17, stosunek 100:1, hamulec, podwójny enkoder, EtherCAT, z osłoną.
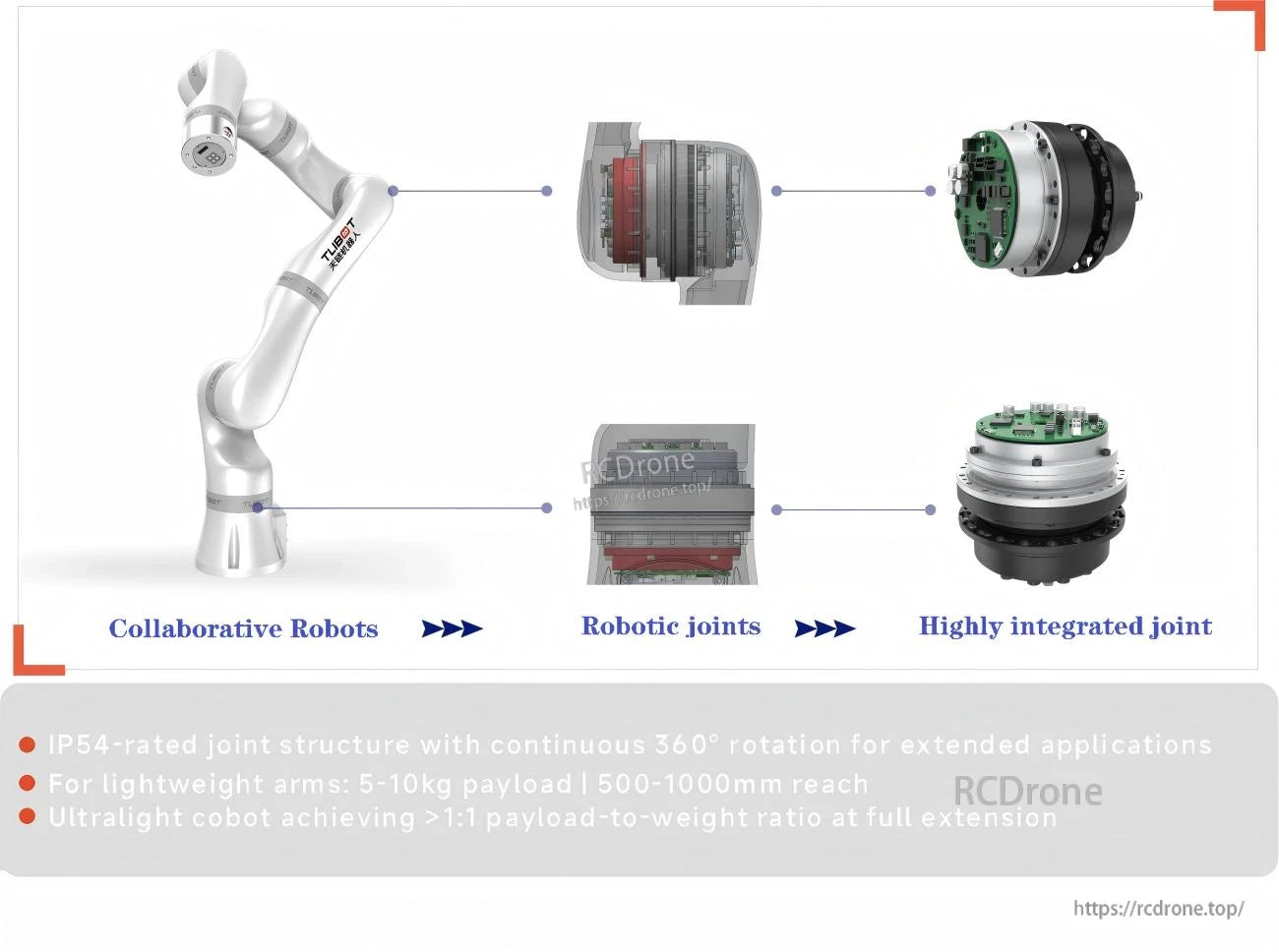
Roboty współpracy Tlibot charakteryzują się wysoko zintegrowanymi stawami o klasie IP54, rotacji 360°, ładowności 5-10 kg, zasięgu 500-1000 mm oraz >1:1 stosunku ładunku do wagi.
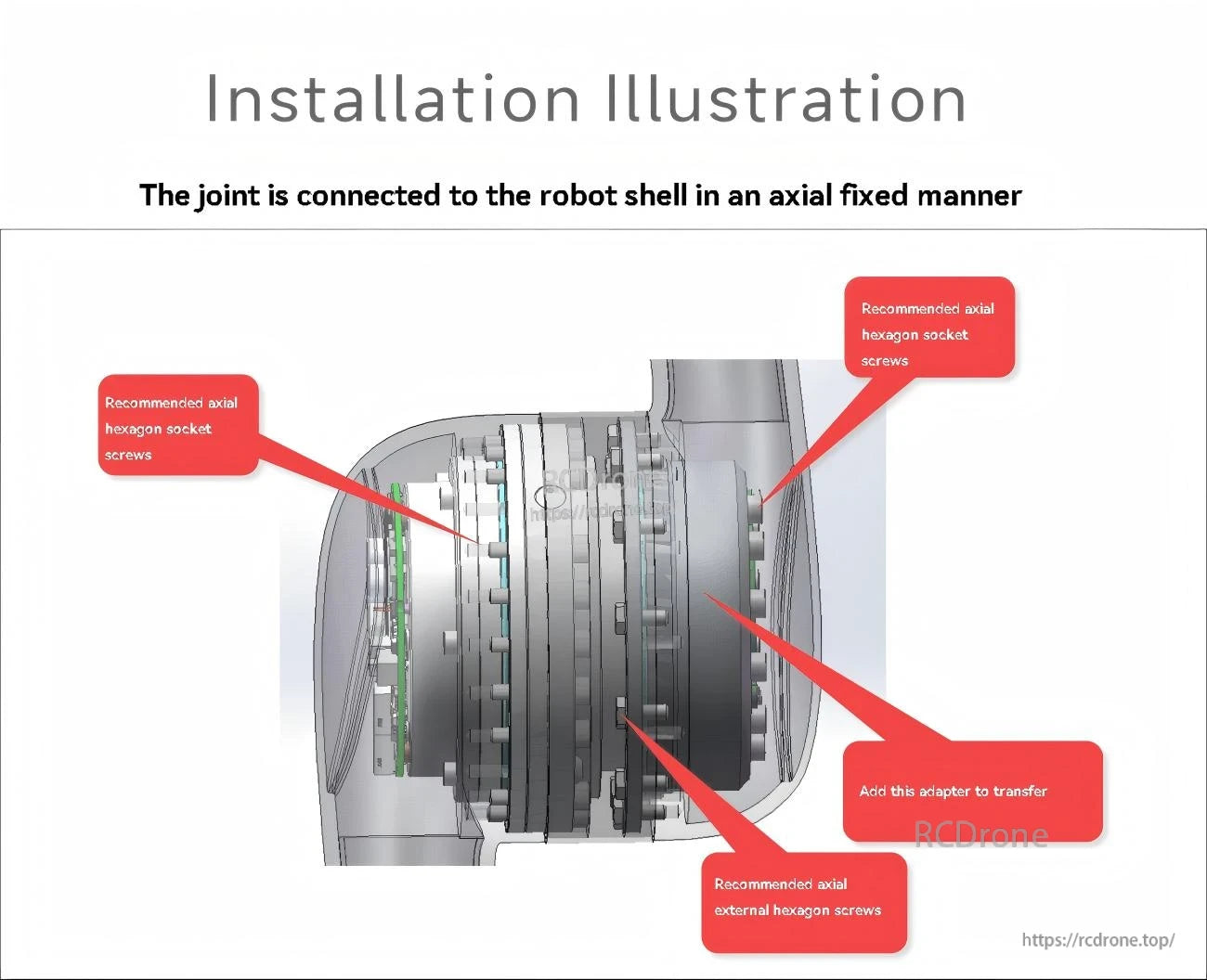
Instrukcja instalacji dla Tlibot połączenia stawu silnika Tsja20 z zalecanymi śrubami i adapterem.
Related Collections


