








WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – 6-osiowy akcelerometr, żyroskop, inklinometr, ROS/Matlab
WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – 6-osiowy akcelerometr, żyroskop, inklinometr, ROS/Matlab
WitMotion
Nie można załadować gotowości do odbioru
Przegląd
WitMotion HWT601-AGV-485 to czujnik postawy/kierunku 6-osiowy zaprojektowany dla robotów AGV, dronów i platform autonomicznych. Łączy w sobie przyspieszenie 3-osiowe + prędkość kątowa 3-osiowa i wyjścia kąt 3-osiowy &i kwaternion przez RS485 (Modbus) z częstotliwością do 200 Hz. Moduł charakteryzuje się dynamicznym filtrowaniem Kalman, wysokoprecyzyjną kalibracją obrotową, automatycznym/ręcznym pozyskiwaniem przesunięcia, zasilaniem awaryjnym do zapisu kierunku przy wyłączeniu zasilania oraz obudową wodoodporną/pyłoszczelną IP67. Obsługuje również wielopoziomowe kaskadowanie (do 32 jednostek) dla zsynchronizowanego pomiaru postawy.
Kluczowe cechy
-
Wysoka precyzja kąta: dokładność XY 0.1°; dokładność Z 0.1° (HWT601-AGV-485) / 0.15° (WT601-AGV-485).
-
Stabilny błąd żyroskopu: XY 5°/h; Z 2°/h (HWT601-AGV-485) / 5°/h (WT601-AGV-485).
-
Szeroki zakres wejściowy 9–36 V, prąd roboczy ≈ 8 mA @12 V.
-
RS485 Modbus, prędkość 4,800–230,400 bps.
-
Próbkowanie: odczyt na żądanie–odpowiedź do 200 Hz.
-
Algorytm: fuzja filtru Kalman i dedykowany algorytm kierunku AGV.
-
Oprogramowanie: darmowy zestaw PC z aktywnymi pulpitami, wykresami krzywych, wizualizacją 3D (samochód/sfera/sześcian/samolot), konfiguracją (błąd, kąt odniesienia, kalibracja przyspieszenia, współczynniki skali), rejestrowanie danych &i bezpośrednie zapisywanie, oraz import Matlab.
-
Przyjazny dla deweloperów: przykładowe programy i wsparcie kodu dla ROS, Linux, C/C#, Python.
-
Środowiskowy: IP67, -40~80 °C (wariant stołowy -40~85 °C pokazany).
-
Kaskadowy: do 32 czujników na RS485 dla jednoczesnego pomiaru postawy.
Wytyczne instalacji
-
Zamontuj czujnik na ściśle, płaskiej, stabilnej powierzchni; nierówne podstawy powodują błąd kąta (patrz RYS.1–2).
-
Utrzymuj oś czujnika równolegle do mierzonej osi; unikaj kątów międzyosiowych (patrz RYS.3–4).
-
Ten model obsługuje tylko instalację poziomą.
Oprogramowanie &i wizualizacja
-
Potężny pulpit danych (kąty, prędkość, przyspieszenie, magnetyzm, kwaternion, porty, temperatura, napięcie itp.).
-
Panel konfiguracyjny: prędkość transmisji, adres urządzenia, automatyczne pozyskiwanie biasu, reset osi Z, kalibracja przyspieszenia, odniesienie kątowe, ręczna kalibracja dodatnia/ujemna oraz współczynniki skalowania.
-
Modele 3D do intuicyjnego monitorowania ruchu oraz krzywe w czasie rzeczywistym z dynamicznymi aktualizacjami.
-
Widok surowych danych i zapisywanie plików dla łatwego zbierania; import analizy Matlab wspierany.
-
Demonstracje ROS IMU INS: wizualizacja śledzenia postawy i wyświetlanie danych postawy (kąt yaw/roll/pitch, prędkość kątowa, przyspieszenie liniowe).
html
Specyfikacje
Interfejs &i Wydajność
| Przedmiot | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| Interfejs / Protokół | RS485 / Modbus | RS485 / Modbus |
| Prędkość baud | 4,800–230,400 bps | 4,800–230,400 bps |
| Dane wyjściowe | 3-osiowa przyspieszenie, prędkość kątowa, kąt, kwaternion | Takie same |
| Częstotliwość próbkowania | Do 200 Hz (żądanie–odpowiedź) | Do 200 Hz |
| Dokładność kąta XY | 0.1° | 0. 1° |
| Dokładność kąta (błąd obrotu 360°) | 0.1° | 0.15° |
| Zakres przyspieszenia / rozdzielczość | ±4 g / 0.0001 g/LSB | To samo |
| Zakres żyroskopu / rozdzielczość | ±250 °/s / 0.0122 (°/s)/LSB | To samo |
| Zakres kąta / rozdzielczość | XZ: ±180°; Y: ±90° / 0.0059° | To samo |
| Niestałość przesunięcia żyroskopu (XY / Z) | 5°/h / 2°/h | 5°/h / 5°/h |
| Współczynnik temperatury (XYZ) | 0.002°/°C | 0.002°/°C |
Elektrotechnika, Mechanika &i Środowisko
-
Napięcie zasilania: 9–36 V; Prąd roboczy: ≈ 8 mA (12 V)
-
Wymiary: 55 × 36.8 × 24 mm; Długość kabla: 1 m
-
Ochrona: IP67
-
Temperatura pracy: -40~80 °C (wariant tabeli pokazuje również -40~85 °C)
-
Instalacja: Wyłącznie montaż poziomy
-
Kaskadowanie: Do 32 jednostek na RS485
Obszary zastosowania
AGV/AMR i roboty mobilne, drony/UAV, bezzałogowe pojazdy logistyczne oraz moduły percepcji autonomicznego prowadzenia.
Nazewnictwo modeli &i wybór
-
HWT601-AGV-485 – wyższa dokładność osi Z (0.1°) i niższa niestabilność Z-bias (2°/h).
-
WT601-AGV-485 – standardowe specyfikacje osi Z (0.15°, 5°/h).
Wybierz HWT601, gdy precyzja w osi Z jest kluczowa.
Szczegóły

Wysokoprecyzyjny czujnik postawy 6-osiowy z 3-osiowym przyspieszeniem, prędkością kątową, kątem i kwaternionem. Oferuje algorytm kierunku AGV, ochronę IP67, filtrację Kalman, automatyczne pozyskiwanie przesunięcia oraz wsparcie dla oprogramowania na PC.
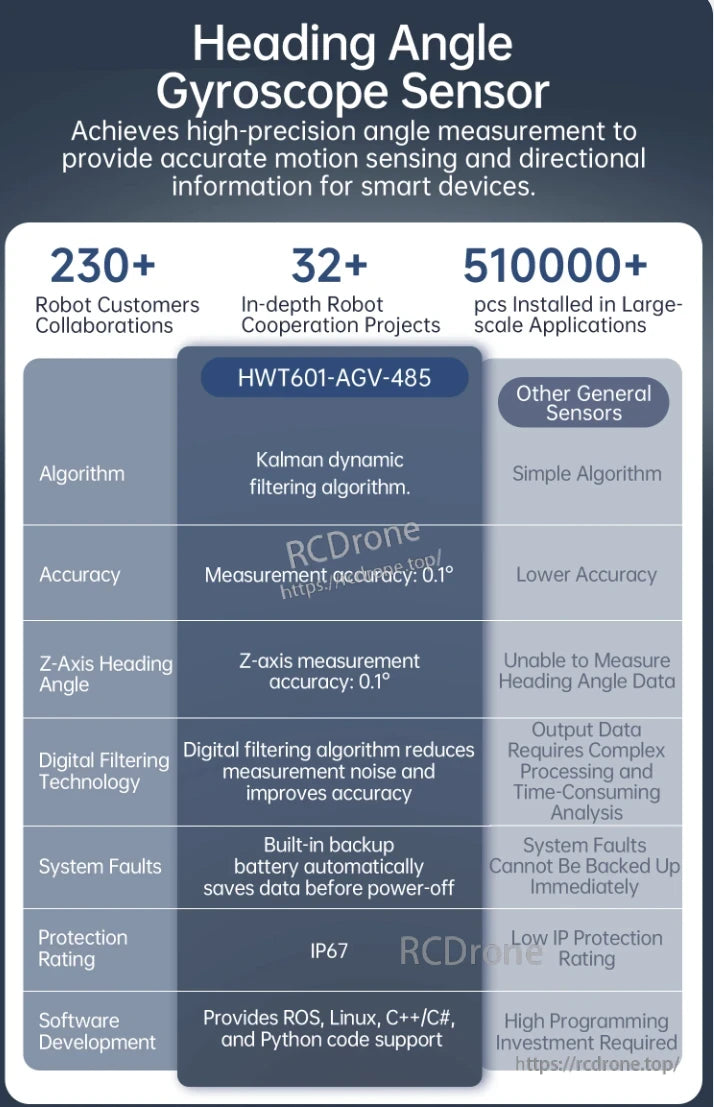
Czujnik żyroskopowy kąta kierunku HWT601-AGV-485 oferuje wysokoprecyzyjny pomiar kąta z filtracją Kalman, dokładnością 0.1°, redukcją szumów cyfrowych, ochroną IP67 oraz wsparciem dla ROS, Linux, C++ i Pythona. Ponad 230 współpracy robotów i 510 000+ instalacji.
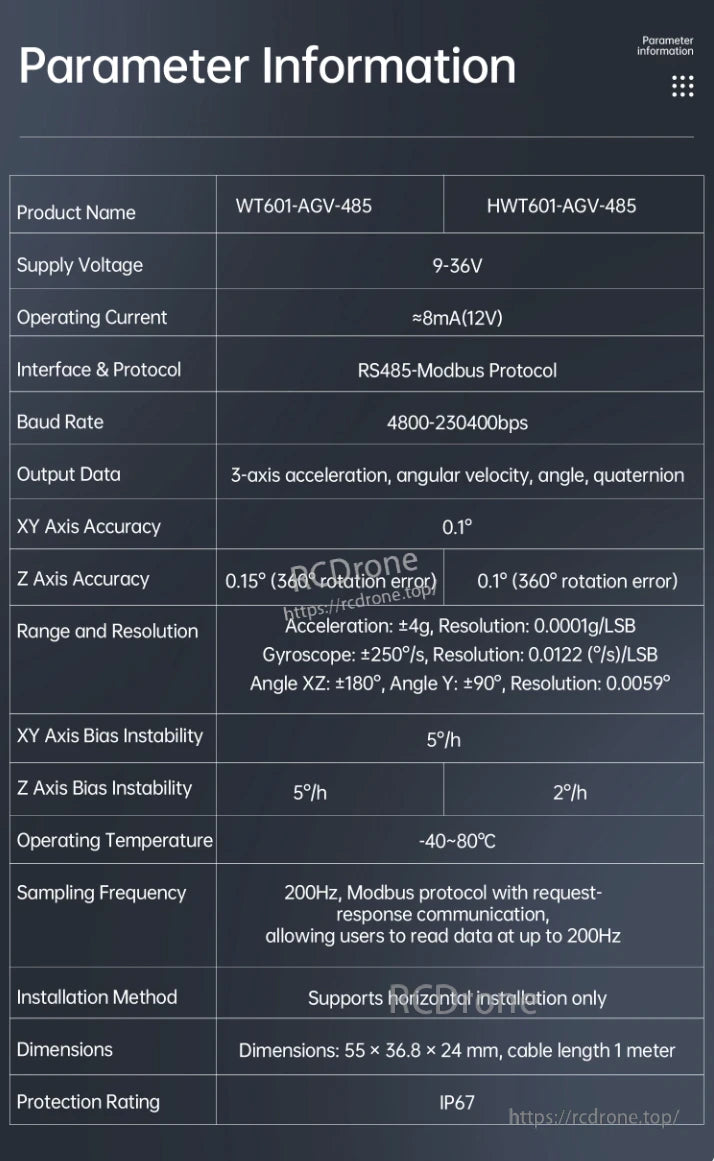
HWT601-AGV-485 IMU oferuje zasilanie 9-36V, RS485-Modbus, próbkowanie 200Hz, przyspieszenie ±4g, żyroskop ±250°/s, stopień ochrony IP67, działanie w temperaturze -40~80°C. Zapewnia dokładne, wysokorozdzielcze dane 3-osiowe.
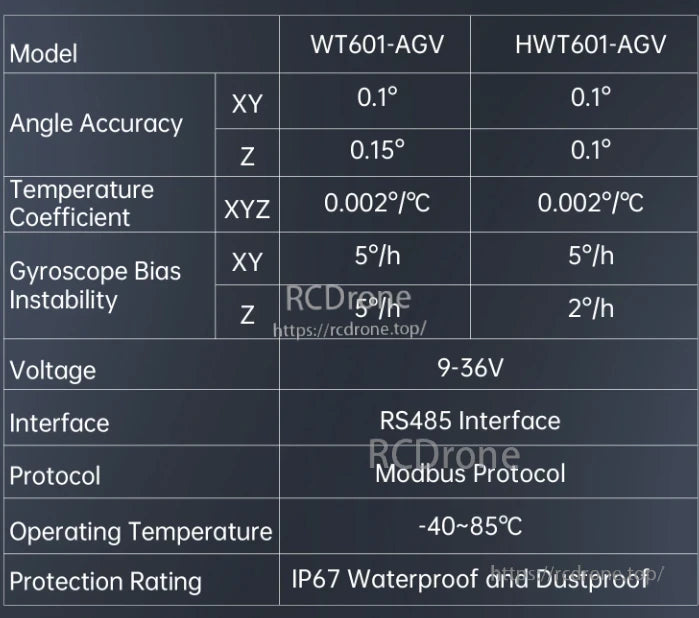
HWT601-AGV IMU oferuje dokładność kąta 0.1° w osiach XY i Z z współczynnikiem temperaturowym 0.002°/°C w osiach XYZ. Niestabilność przesunięcia żyroskopu wynosi 5°/h (XY) i 2°/h (Z). Działa na zasilaniu 9–36V, wykorzystuje RS485 z Modbus i funkcjonuje w temperaturze od -40 do 85°C. Oznaczenie IP67 zapewnia ochronę przed wodą i kurzem. Wariant WT601-AGV ma podobne specyfikacje, ale dokładność osi Z wynosi 0.15° oraz niestabilność przesunięcia osi Z wynosi 5°/h. Oba modele zapewniają niezawodne działanie w wymagających warunkach.
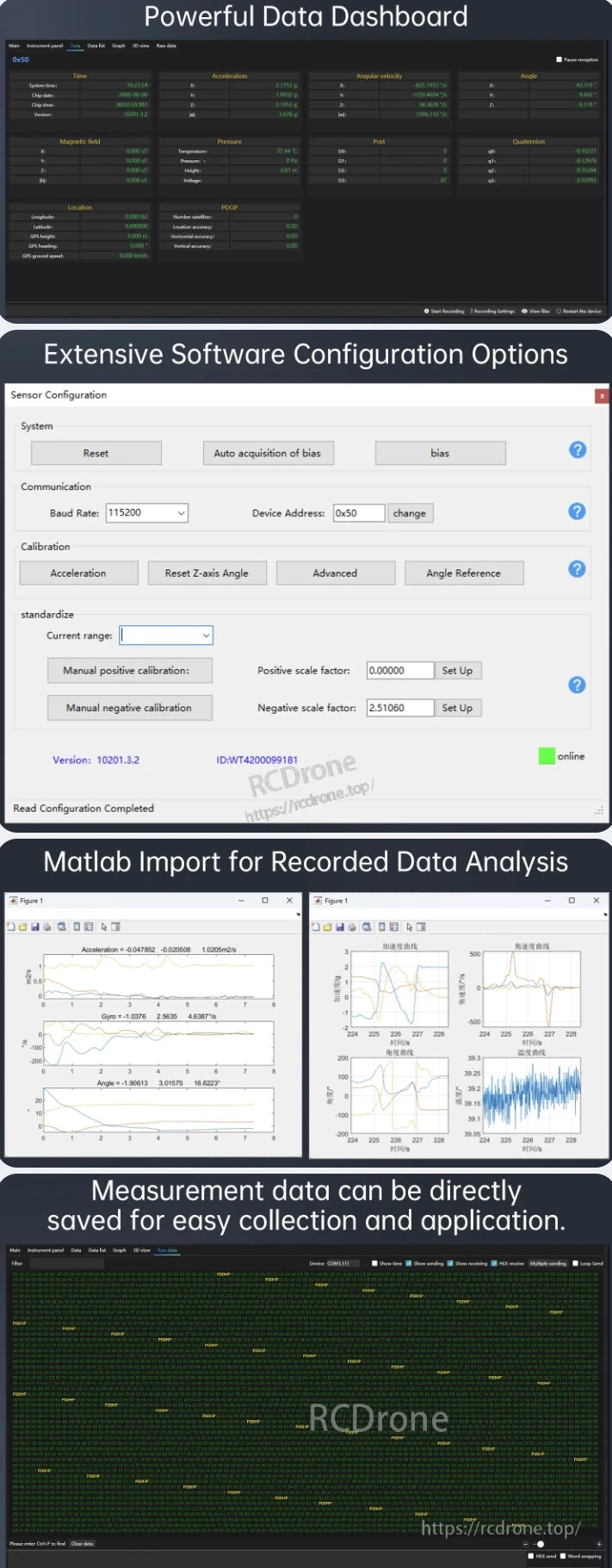
Potężny pulpit danych z odczytami czujników w czasie rzeczywistym, rozbudowaną konfiguracją oprogramowania, importem MATLAB do analizy oraz bezpośrednim zapisywaniem danych dla łatwego zbierania i zastosowania.
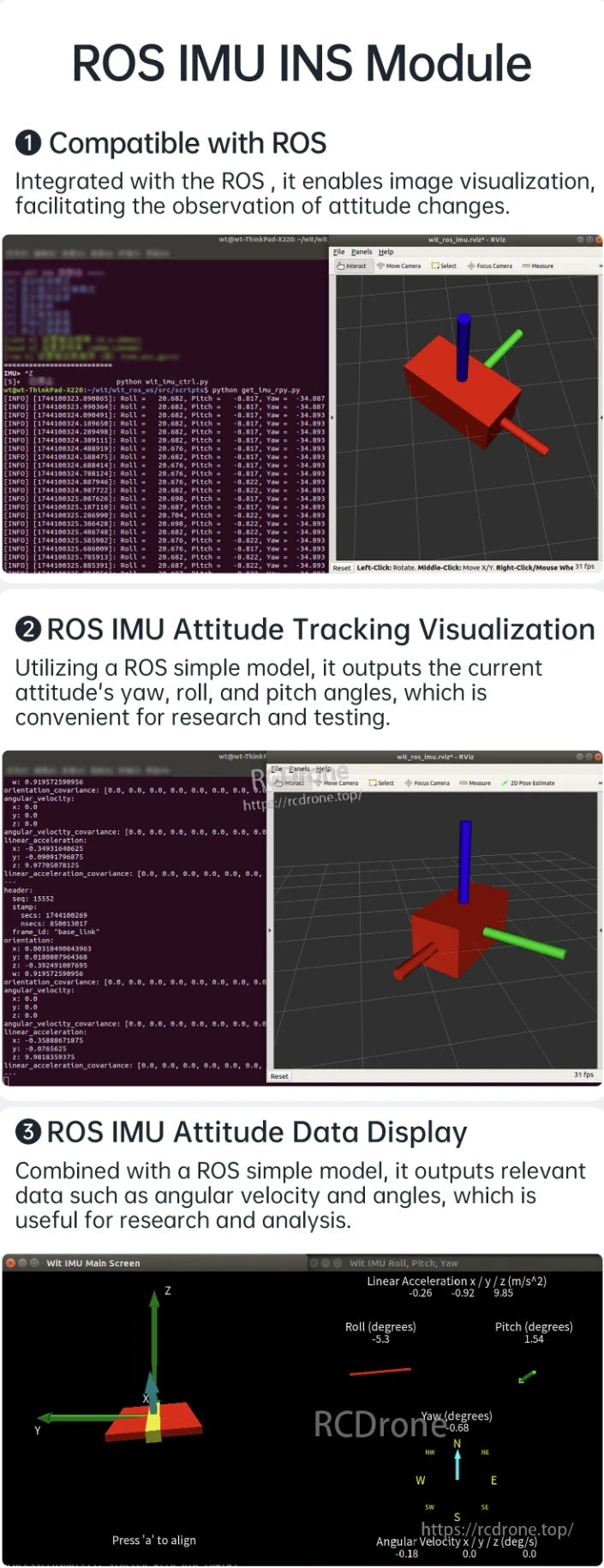
Moduł ROS IMU INS oferuje zgodność z ROS, wizualizuje śledzenie postawy oraz wyświetla w czasie rzeczywistym kąt przechylenia, kąt nachylenia, kąt obrotu, prędkość kątową i przyspieszenie liniowe do badań i analizy.
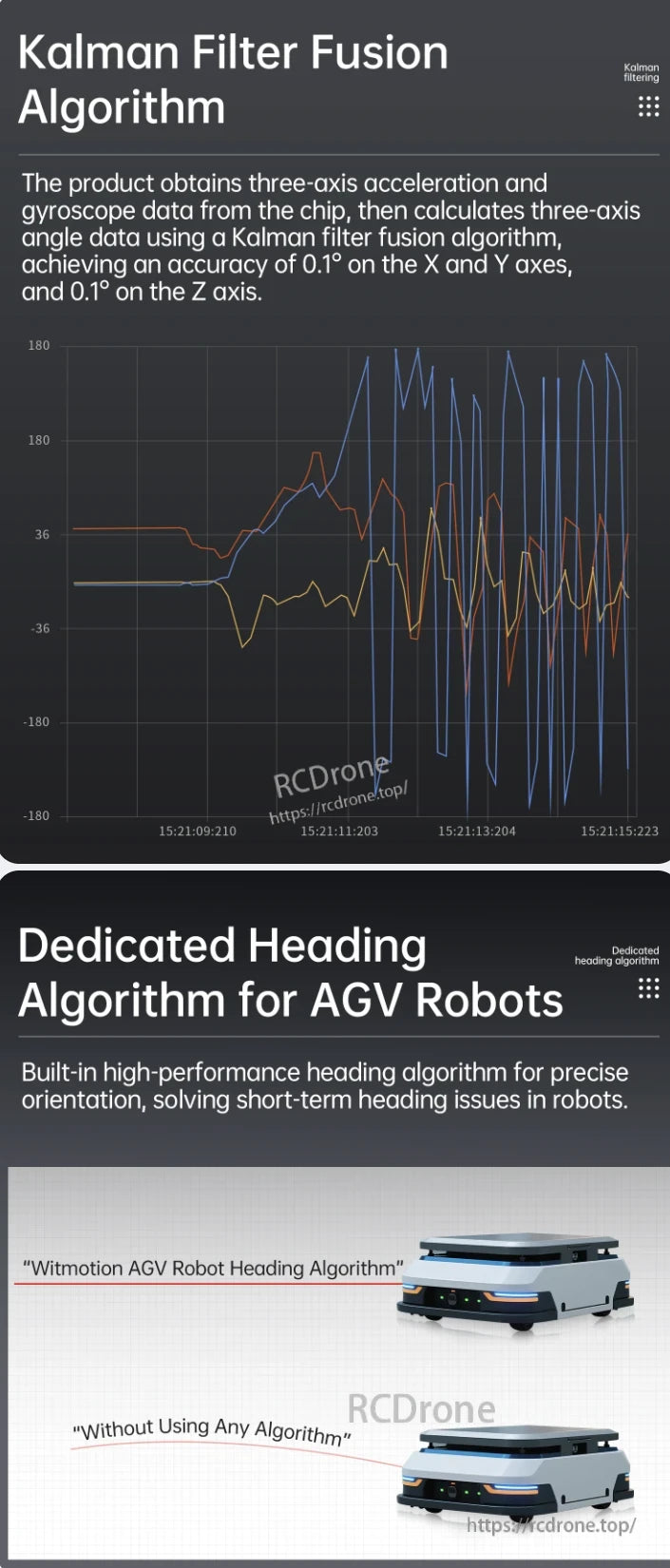
WitMotion HWT601 AGV IMU dostarcza precyzyjne dane kątowe w 3 osiach z dokładnością 0,1° przy użyciu fuzji filtrów Kalman'a. Jego dedykowany algorytm kierunku zapewnia stabilną orientację robota, znacznie poprawiając wydajność w porównaniu do systemów bez takich algorytmów.
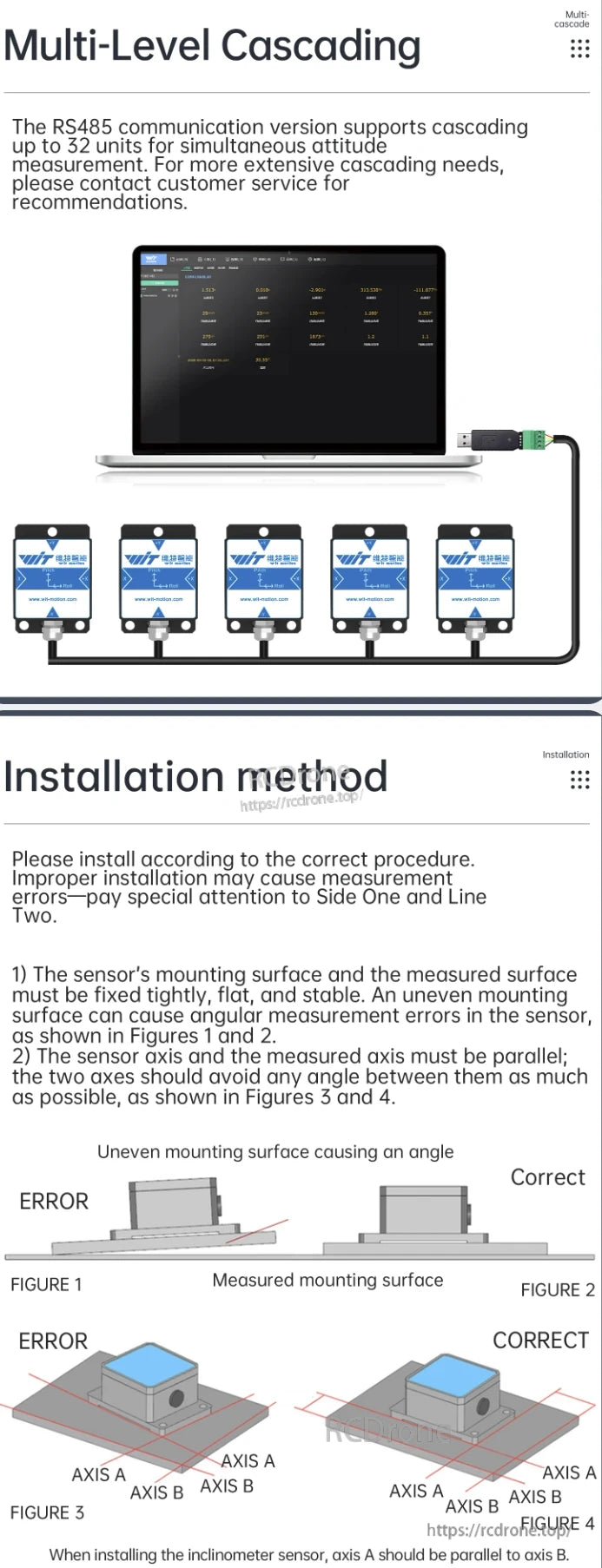
WitMotion HWT601 AGV IMU obsługuje do 32 kaskadowych jednostek za pośrednictwem RS485 do pomiaru postawy. Upewnij się, że montaż jest płaski, stabilny i osie są wyrównane dla dokładności.
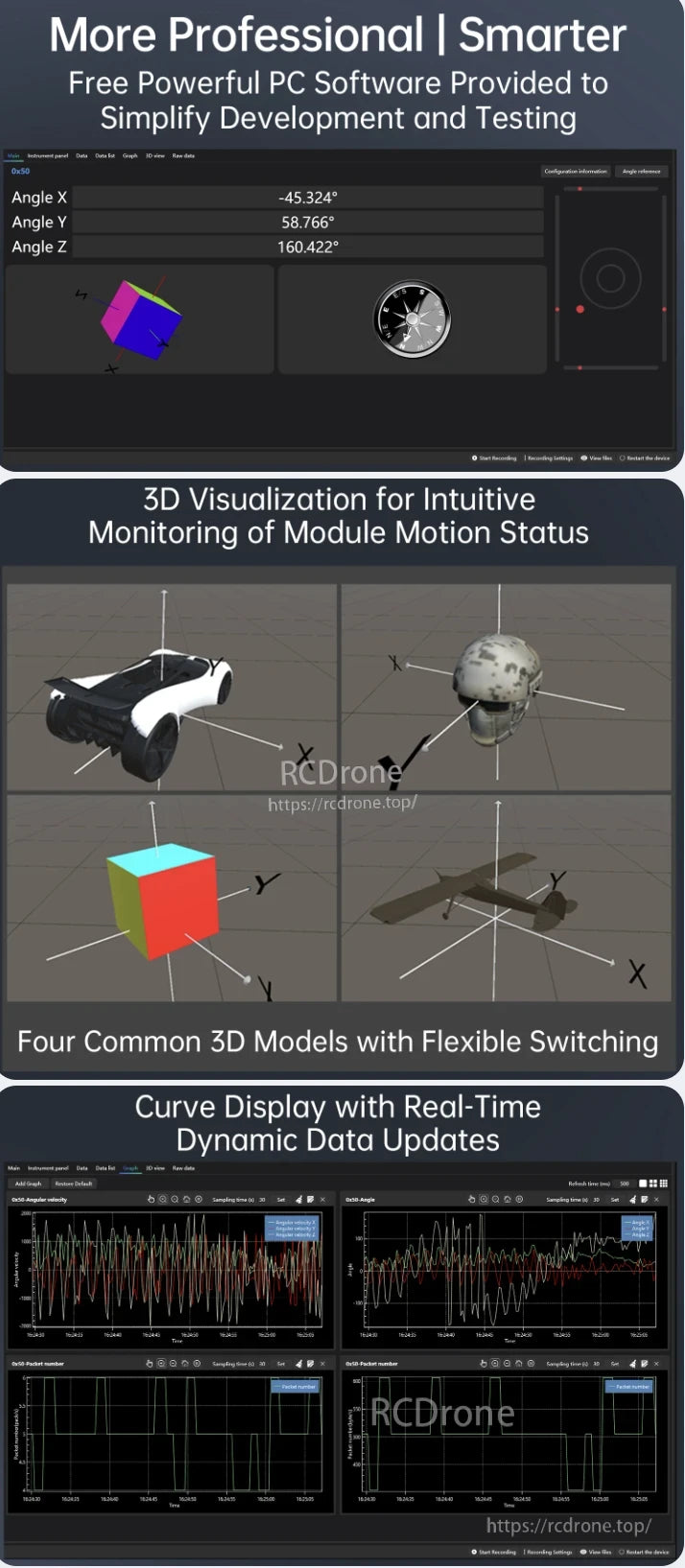
Profesjonalne oprogramowanie PC dla WitMotion HWT601 AGV IMU oferuje wizualizację 3D w czasie rzeczywistym, monitorowanie kątów oraz wyświetlanie dynamicznych krzywych.Cechy obejmują intuicyjne śledzenie ruchu, elastyczne przełączanie modeli oraz aktualizacje danych na żywo dla efektywnego rozwoju i testowania.
Dokumentacja wspierająca zawiera przykładowe programy dla STM32, Arduino, 51 UART, Windows C++ i Matlab, aby pomóc deweloperom w zastosowaniu produktu za pomocą samouczków i przykładów kodu.
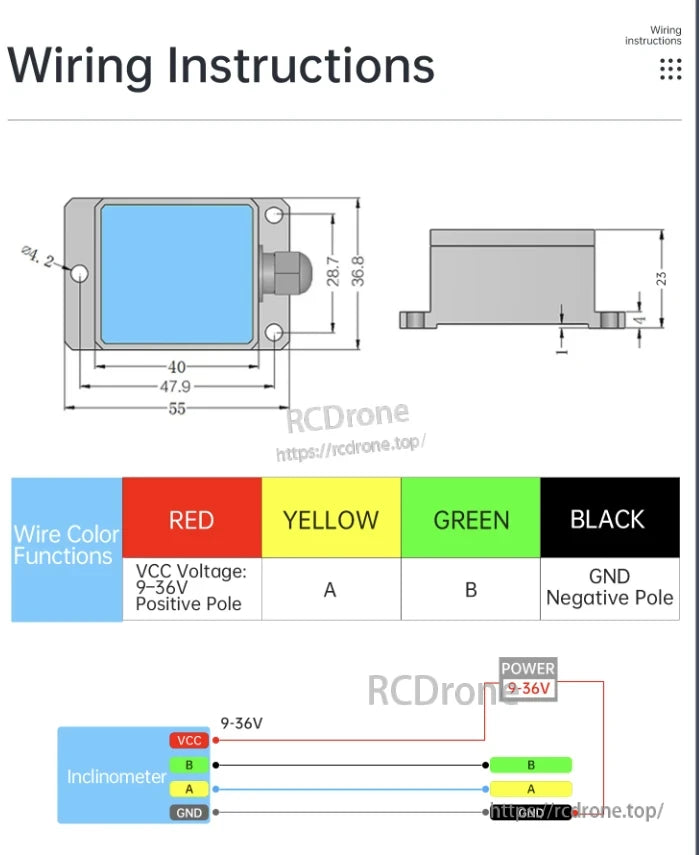
WitMotion HWT601 AGV IMU instrukcja okablowania: czerwony (9-36V), żółty (A), zielony (B), czarny (GND). Wymiary i schemat połączeń dostarczone.

WitMotion HWT601 AGV IMU dla dronów, autonomicznego prowadzenia, robotów mobilnych i bezzałogowych pojazdów logistycznych.
Related Collections








